1.本发明涉及船舶领域,具体而言涉及船舶用设备的选型方法及船舶。
背景技术:
2.世界石油资源的日益短缺和船舶排放法规的逐步严格,促进了船舶动力新能源的发展。
3.天然气作为一种新型气体燃料。其具有高热值、燃烧产物清洁,以及价格低等特点,因此天然气在船舶领域有着很广阔的发展前景。而对于使用天然气作为燃料的燃气发动机,由于其自身燃烧特性的原因,燃气发动机存在低负荷扭矩储备不足,动态工况响应速度慢等缺陷。这些缺陷制约了燃气发动机作为船舶的推进主机。
4.对于采用纯电动力系统的船舶具有良好的经济性、环保性,以及舒适性。因此采用纯电动力系统的船舶是未来船舶发展的必然趋势。然而受到电能来源、功率密度等因素的影响,现阶段采用纯电动力系统的船舶的运行区域和船体的排量都受到了严重制约。
5.而气电混合动力系统(采用天然气和电能作为能源的系统)有助于解决新型技术应用与技术水平制约之间的矛盾,为船舶从传统的内燃机驱动直接推进过渡到纯电驱动提供了可行性方案。采用气电混合动力系统的船舶同时克服燃气发动机推进船舶低负荷扭矩储备不足,机动工况动态响应慢的缺陷,以及采用纯电动力系统的船舶的储能装置重量大、造价高、运行区域受限等缺陷。采用气电混合动力系统的船舶还具有冗余性好,以及可以根据航行需求选择最经济的推进模式等独特优势。
6.目前,用于船舶的气电混合动力系统尚处于发展初期,相关性研究主要集中在理论研究,针对用于船舶的气电混合动力系统的设计方法的研究极少。用于船舶的气电混合动力系统的设计难点正是在于燃气发动机的功率与电机的功率的分配,以及蓄电池和超级电容的选型和容量确定等方面。因此,为设计人员提供一种能够满足用户需求的气电混合动力系统的燃气发动机和电机选型方法具有非常重大的意义。
7.为此,本发明提供一种船舶用设备的选型方法及船舶,用以至少部分地解决上述问题。
技术实现要素:
8.在发明内容部分中引入了一系列简化形式的概念,这将在具体实施例部分中进一步详细说明。本发明的发明内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
9.为至少部分地解决上述技术问题,本发明提供了一种船舶用设备的选型方法,船舶包括螺旋桨、电机,以及燃气发动机,电机和燃气发动机之间的连接方式包括并联方式和串联方式,电机和燃气发动机连接至螺旋桨,选型方法包括:
10.根据船舶的电机和燃气发动机的连接方式、船舶的驱动力和航速之间的功率曲线、运行模式、以及和运行模式对应的预定航速确定船舶的总推进功率;
11.确定船舶的加速附加功率;
12.根据总推进功率和加速附加功率确定燃气发动机的功率和电机的功率。
13.根据本发明的船舶用设备的选型方法,船舶由电机和/或燃气发动机提供动力航行,燃料的成本低,此外燃气发动机燃烧燃气的产物清洁环保,并且根据船舶的电机和燃气发动机的连接方式、船舶的驱动力和航速之间的功率曲线、运行模式、以及和运行模式对应的预定航速确定船舶的总推进功率,然后根据总推进功率和加速附加功率确定电机和燃气发动机的功率,可以使船舶更加适应各种工况和航行环境。
14.可选地,确定船舶的加速附加功率的步骤包括:
15.根据船舶的速度阻力曲线和燃气发动机的转速变化曲线确定船舶的加速附加功率。
16.可选地,电机的功率≥加速附加功率。
17.可选地,总推进功率-加速附加功率≤燃气发动机的功率。
18.可选地,选型方法还用于选取蓄电池,在确定电机的功率后,选型方法还包括:
19.根据公式(1)确定蓄电池的容量
20.eb=pm×
t1×
ηb×
ηd×
ηm×
ηs×
η
l
ꢀꢀ
(1)
21.eb为蓄电池的容量;
22.pm为电机的功率;
23.t1为进出港所需的时间;
24.ηb为蓄电池效率;
25.ηd为电力变换部件的效率;
26.ηm为电机效率;
27.ηs为传动效率;
28.η
l
为电池寿命折减系数;
29.并且/或者
30.选型方法还用于选取超级电容,在确定电机的功率后,选型方法还包括:
31.根据公式(2)确定超级电容的容量
32.ec=pm×
t2×
ηc×
ηd×
ηm×
ηsꢀꢀ
(2)
33.ec为超级电容的容量;
34.t2为船舶加速的时间;
35.ηc为超级电容的效率。
36.本发明还提供了一种船舶,船舶包括:螺旋桨;燃气发动机;电机,电机和燃气发动机之间的连接方式包括并联方式和串联方式,电机和燃气发动机均可断开地连接至螺旋桨;电源组件;切换控制组件,切换控制组件用于控制电机和螺旋桨之间的连接或断开,以及用于控制燃气发动机和螺旋桨之间的连接或断开;能量管理组件,能量管理组件用于控制电源组件向电机供电;其中,燃气发动机的功率和电机的功率根据前述的选型方法选取。
37.根据本发明的船舶,燃气发动机的功率和电机的功率根据前述的选型方法选取,船舶由电机和/或燃气发动机提供动力航行,燃料的成本低,此外燃气发动机燃烧燃气的产物清洁环保,并且根据船舶的电机和燃气发动机的连接方式、船舶的驱动力和航速之间的功率曲线、运行模式、以及和运行模式对应的预定航速确定船舶的总推进功率,然后根据总
推进功率和加速附加功率确定电机和燃气发动机的功率,可以使船舶更加适应各种工况和航行环境。
38.可选地,螺旋桨包括桨轴,电机包括转轴,燃气发动机包括输出轴,船舶还包括:
39.第一离合器,第一离合器的第一端连接至燃气发动机的输出轴,切换控制组件电连接至第一离合器,以控制第一离合器接合或分离;
40.开关组件,开关组件电连接至电机,电源组件电连接至开关组件,以通过开关组件向电机输送电能或存储电机提供的电能,能量管理组件电连接至开关组件,以控制开关组件的连通或断开;
41.其中,船舶还包括齿轮箱和第二离合器,齿轮箱的输出轴连接至桨轴,第二离合器的第一端连接至转轴的第一端,第二离合器的第二端连接至齿轮箱的输入轴,第一离合器的第二端连接至桨轴,以使电机和燃气发动机并联,切换控制组件电连接至第二离合器,以控制第二离合器接合或分离,或者
42.第一离合器的第二端连接至转轴的第一端,转轴的第二端连接至桨轴,以使电机和燃气发动机串联。
43.可选地,船舶还包括电网,电源组件包括:
44.电力变换部件,电力变换部件的第一端连接至开关组件,电力变换部件的第二端连接至电网;
45.蓄能部件,蓄能部件的输出端连接至电力变换部件的第三端,以向电力变换部件输送电能或存储电力变换部件提供的电能。
46.可选地,电力变换部件包括:
47.整流器,整流器的第一端连接至电网;
48.直流母排,直流母排连接至整流器的第二端,直流母排连接至蓄能部件的输出端;
49.逆变器,逆变器的第一端连接至直流母排,逆变器的第二端连接至开关组件。
50.可选地,电力变换部件包括第一dc-dc变换器,第一dc-dc变换器的第一端连接至直流母排,蓄能部件的输出端包括电容输出端,电容输出端连接至第一dc-dc变换器的第二端;蓄能部件包括超级电容和超级电容管理系统,超级电容的第一端连接至电容输出端,超级电容管理系统连接至超级电容的第二端;
51.并且/或者
52.电力变换部件包括第二dc-dc变换器,第二dc-dc变换器的第一端连接至直流母排,蓄能部件的输出端包括电池输出端,电池输出端连接至第二dc-dc变换器的第二端;蓄能部件包括蓄电池和电池管理系统,蓄电池的第一端连接至电池输出端,电池管理系统连接至蓄电池的第二端。
附图说明
53.为了使本发明的优点更容易理解,将通过参考在附图中示出的具体实施方式更详细地描述上文简要描述的本发明。可以理解这些附图只描绘了本发明的典型实施方式,因此不应认为是对其保护范围的限制,通过附图以附加的特性和细节描述和解释本发明。
54.图1为根据本发明的第一个优选实施方式的第一种类型的船舶的燃气发动机、第一离合器、螺旋桨、电机、第二离合器,齿轮箱以及电源组件连接在一起的示意图;
55.图2为根据本发明的第一个优选实施方式的第二种类型的船舶的燃气发动机、第一离合器、螺旋桨、电机,以及电源组件连接在一起的示意图;
56.图3为根据本发明的第一个优选实施方式的船舶用设备的选型方法的流程示意图;
57.图4为图3的选型方法的确定船舶的加速附加功率的步骤的流程示意图。
58.附图标记说明
59.110:螺旋桨
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
111:桨轴
60.120:燃气发动机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
121:输出轴
61.130:第一离合器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
140:电机
62.141:转轴
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
150:电源组件
63.151:电力变换部件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
152:整流器
64.153:直流母排
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
154:逆变器
65.155:蓄能部件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
156:第一dc-dc变换器
66.157:电容输出端
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
158:超级电容
67.159:超级电容管理系统
ꢀꢀꢀꢀꢀ
160:第二dc-dc变换器
68.161:电池输出端
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
162:蓄电池
69.163:电池管理系统
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
170:第二离合器
70.180:齿轮箱
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
190:电网
71.191:集合控制组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
192:切换控制组件
72.193:能量管理组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
210:螺旋桨
73.211:桨轴
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
220:燃气发动机
74.221:输出轴
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
230:第一离合器
75.240:电机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
241:转轴
76.250:电源组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
251:电力变换部件
77.252:整流器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
253:直流母排
78.254:逆变器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
255:蓄能部件
79.256:第一dc-dc变换器
ꢀꢀꢀꢀꢀ
257:电容输出端
80.258:超级电容
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
259:超级电容管理系统
81.260:第二dc-dc变换器
ꢀꢀꢀꢀꢀ
261:电池输出端
82.262:蓄电池
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
263:电池管理系统
83.290:电网
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
291:集合控制组件
84.292:切换控制组件
ꢀꢀꢀꢀꢀꢀꢀꢀ
293:能量管理组件
具体实施方式
85.在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员来说显而易见的是,本发明实施方式可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本发明实施方式发生混淆,对于本领域公知的一些技术特征未进行描述。
86.以下参照附图对本发明的优选实施方式进行说明。需要说明的是,本文中所使用
的术语“上”、“下”以及类似的表述只是为了说明的目的,并非限制。
87.在本文中,本技术中所引用的诸如“第一”和“第二”的序数词仅仅是标识,而不具有任何其它含义,例如特定的顺序等。而且,例如,术语“第一部件”其本身不暗示“第二部件”的存在,术语“第二部件”本身不暗示“第一部件”的存在。
88.为了彻底了解本发明实施方式,将在下列的描述中提出详细的结构。显然,本发明实施方式的施行并不限定于本领域的技术人员所熟习的特殊细节。本发明的较佳实施方式详细描述如下,然而除了这些详细描述外,本发明还可以具有其他实施方式。
89.本发明的实施方式提供了一种船舶用设备的选型方法。如图1所示,第一种类型的船舶可以是由电机140和/或燃气发动机120提供动力的混合动力船舶。该船舶的电机140也可以作为发电机使用,以为船舶输送电能。
90.如图1所示,船舶包括螺旋桨110和轴系。螺旋桨110包括桨轴111。桨轴111可以通过轴系连接至后文的燃气发动机120和电机140。这样燃气发动机120和/或电机140可以驱动桨轴111转动,进而驱动船舶航行。
91.船舶还包括燃气发动机120和第一离合器130。燃气发动机120用于通过燃烧可燃气(例如天然气或沼气),以将热能转换为机械能。燃气发动机120包括输出轴121。
92.第一离合器130的第一端连接至燃气发动机120的输出轴121。第一离合器130的第二端可以连接至轴系,以通过轴系连接至桨轴111。这样,第一离合器130接合时,燃气发动机120可以驱动螺旋桨110转动,进而驱动船舶航行。第一离合器130的第二端也可以通过轴系连接至后文的电机140,这样第一离合器130接合时,当后文的电源组件150不向电机140输送电能时,燃气发动机120可以驱动后文的电机140的转轴141转动,进而使电机140发电,以为船舶输送电能。
93.船舶还包括电机140、第二离合器170和开关组件(未示出)。电机140包括转轴141。第二离合器170的第一端连接至转轴141的第一端,第二离合器170的第二端可以连接至轴系,以通过轴系连接至桨轴111。这样,第二离合器170接合时,电机140可以驱动螺旋桨110转动,以驱动船舶航行。第二离合器170接合时,当后文的电源组件150不向电机140输送电能时,燃气发动机120带动电机140的转轴141转动,以使电机140发电。此时电机140和燃气发动机120之间的连接方式为并联方式。
94.优选地,船舶还包括齿轮箱180。齿轮箱180的输出轴可以通过轴系连接至桨轴111,齿轮箱180的输入轴连接至第二离合器170的第二端。由此,齿轮箱180可以增加电机140向桨轴111传递的扭矩。
95.船舶还包括电源组件150。电源组件150电连接至开关组件,以向电机140输送电能,进而使电机140为螺旋桨110的转动提供扭矩。当燃气发动机120带动电机140转动,以使电机140发电时,电源组件150可以存储电机140提供的电能。其中,开关组件用于控制电机140和电源组件150之间的电连接连通或断开。
96.船舶还包括集合控制组件191、切换控制组件192,以及能量管理组件193。集合控制组件191电连接切换控制组件192和能量管理组件193。这样,集合控制组件191可以和切换控制组件192通讯,以及可以和能量管理组件193通讯。集合控制组件191中预先存储有后文的燃气推进模式、pth(power take home)模式、pti(power take in)模式,以及pto(power take out)模式。
97.切换控制组件192电连接第一离合器130和第二离合器170。这样,切换控制组件192可以控制第一离合器130和第二离合器170接合或分离。
98.能量管理组件193电连接开关组件。这样,能量管理组件193可以控制开关组件导通或断开,进而控制电机140和电源组件150之间的电连接导通或断开。能量管理组件193还电连接至电源组件150,以控制电源组件150和电机140之间的电流方向。
99.本实施方式中,船舶的运行模式包括燃气推进模式、pth模式、pti模式,以及pto模式。
100.燃气推进模式中,集合控制组件191向切换控制组件192和能量管理组件193发送燃气推进模式指令。这样,集合控制组件191通过切换控制组件192控制第一离合器130接合,以及控制第二离合器170分离。集合控制组件191通过能量管理组件193控制开关组件断开,以及控制电源组件150停止向电机140输送电能。此时燃气发动机120驱动螺旋桨110转动,电机140停止转动。这样,仅有燃气发动机120为驱动螺旋桨110的转动提供扭矩。燃气推进模式适用于顺流航行、逆流航行以及港口航行。
101.pth模式中,集合控制组件191向切换控制组件192和能量管理组件193发送pth模式指令。这样,集合控制组件191通过切换控制组件192控制第一离合器130分离,以及控制第二离合器170接合。集合控制组件191通过能量管理组件193控制开关组件导通,以及控制电源组件150向电机140输送电能。此时燃气发动机120停止转动,电机140转动。这样,仅有电机140为驱动螺旋桨110的转动提供扭矩。pth模式适用于顺流航行和港口航行。
102.pti模式中,集合控制组件191向切换控制组件192和能量管理组件193发送pti模式指令。这样,集合控制组件191通过切换控制组件192控制第一离合器130接合,以及控制第二离合器170接合。集合控制组件191通过能量管理组件193控制开关组件导通,以及控制电源组件150向电机140输送电能。此时燃气发动机120工作,同时电机140工作。在同一时刻,燃气发动机120和电机140共同为驱动螺旋桨110的转动提供扭矩。pti模式适用于高速航行、激流航行以及逆流航行。
103.pto模式中,集合控制组件191向切换控制组件192和能量管理组件193发送pto模式指令。这样,集合控制组件191通过切换控制组件192控制第一离合器130接合,以及控制第二离合器170接合。集合控制组件191通过能量管理组件193控制开关组件导通,以及控制电源组件150停止向电机140输送电能。此时燃气发动机120为驱动螺旋桨110的转动提供扭矩。同时燃气发动机120驱动电机140的转轴141转动,以使电机140发电,此时电源组件150和电机140电连接,以存储电机140提供的电能。pto模式中,电机140提供的电能也可以输送至后文的电网190,以为船舶提供电能。pto模式适用于顺流航行和港口航行。
104.请参考图1,船舶还包括电网190。电网190包括发电机组。这样电网190可以为船舶供电。电源组件150包括电力变换部件151和蓄能部件155。电力变换部件151的第一端连接至开关组件。电力变换部件151的第二端连接电网190。蓄能部件155的输出端连接至电力变换部件151的第三端。这样电机140通过电力变换部件151连接至蓄能部件155。
105.电机140向电源组件150提供的电能经过电力变换部件151转换至预定存储电压或预定存储电流,然后电能被输送至存储部件,存储部件存储该电能。
106.电机140通过电力变换部件151连接至电网190。这样电机140向电源组件150提供的电能经过电力变换部件151转换至预定电网电压或预定电网电流,然后电能被输送至电
网190,以为船舶供电。
107.优选地,电力变换部件151包括整流器152、直流母排153与逆变器154。整流器152的第一端连接至电网190。直流母排153连接至整流器152的第二端。直流母排153连接至蓄能部件155的输出端。逆变器154的第一端连接至直流母排153。逆变器154的第二端连接至开关组件。由此,经过逆变器154和整流器152的作用,电机140经过电力变换部件151输送至电网190的电压或电流稳定,并且电力变换部件151的结构简单。
108.优选地,电力变换部件151还包括第一dc-dc变换器(dc-dc converter)156和第二dc-dc变换器160。第一dc-dc变换器156的第一端连接至直流母排153。第二dc-dc变换器160的第一端连接至直流母排153。前述的电力变换部件151的第三端包括第一dc-dc变换器156的第二端和第二dc-dc变换器160的第二端。蓄能部件155的输出端包括电容输出端157和电池输出端161。电容输出端157连接至第一dc-dc变换器156的第二端。电池输出端161连接至第二dc-dc变换器160的第二端。由此,经过逆变器154、整流器152、第一dc-dc变换器156与第二dc-dc变换器160,电机140的电能转换成预定存储电压或预定存储电流,并存储至后文的蓄电池162和超级电容158。
109.蓄能部件155包括超级电容158和超级电容管理系统(cms,capacitor management system)159。超级电容158的第一端连接至电容输出端157。超级电容管理系统159连接至超级电容158的第二端。由此超级电容管理系统159可以有效管理超级电容158的工作。超级电容158可以在船舶加速时增加对电机140的输出功率,以使电机140向螺旋桨110输出更大的扭矩,进而使船舶加速。当电机140充当发电机时,超级电容158可以存储部分电能。由此,超级电容158的设置可以增加后文的蓄电池162的使用寿命。
110.蓄能部件155还包括蓄电池162和电池管理系统(bms,battery management system)163。蓄电池162的第一端连接至电池输出端161,电池管理系统163连接至蓄电池162的第二端。由此电池管理系统163可以有效管理蓄电池162的工作。蓄电池162为电机140输送电能,以使电机140向螺旋桨110提供扭矩,进而使船舶航行。当电机140充当发电机时,蓄电池162可以存储部分电能。可以理解,蓄电池162也可以向电网190供电,此时可以断开开关组件,以断开电力变换部件151和电机140的电连接。
111.船舶在pth模式下航行时,可以由蓄电池162独立向电机140供电,以使电机140驱动螺旋桨110转动,实现零排放。
112.本实施方式中,船舶由电机140和/或燃气发动机120提供动力航行,燃料的成本低,此外燃气发动机120燃烧燃气的产物清洁环保。
113.第二种类型的船舶中,如图2所示,船舶不包括第二离合器和齿轮箱。电机240包括转轴241。转轴241的第二端可以通过轴系连接至桨轴211。转轴241的第一端可以通过轴系连接至第一离合器230的第二端。这样,第一离合器230接合时,燃气发动机220可以驱动转轴241转动,转动的转轴241带动螺旋桨210转动,以驱动船舶航行。此时电机140和燃气发动机220之间的连接方式为串联方式。
114.第二种类型的船舶中,船舶的运行模式包括燃气推进模式、pth模式、pti模式,以及pto模式。
115.第二种类型的船舶的燃气推进模式中,集合控制组件291向切换控制组件292和能量管理组件293发送燃气推进模式指令。这样,集合控制组件291通过切换控制组件292使第
一离合器230接合。集合控制组件291通过能量管理组件293控制开关组件断开,以及控制电源组件250停止向电机240输送电能。此时燃气发动机220驱动螺旋桨210转动,电机240的转轴241随燃气发动机220转动。这样,仅有燃气发动机220为驱动螺旋桨210的转动提供扭矩,电机仅是起到传递扭矩的作用,并没有承担驱动螺旋桨210转动的扭矩。
116.第二种类型的船舶的pth模式中,集合控制组件291向切换控制组件292和能量管理组件293发送pth模式指令。这样,集合控制组件291通过切换控制组件292使第一离合器230分离。集合控制组件291通过能量管理组件293控制开关组件导通,以及控制电源组件250向电机240输送电能。此时燃气发动机220停止转动,电机240转动。这样,仅有电机240为驱动螺旋桨210的转动提供扭矩。
117.第二种类型的船舶的pti模式中,集合控制组件291向切换控制组件292和能量管理组件293发送pti模式指令。这样,集合控制组件291通过切换控制组件292使第一离合器230接合。集合控制组件291通过能量管理组件293控制开关组件导通,以及控制电源组件250向电机240输送电能。此时燃气发动机220工作,同时电机240工作。在同一时刻,燃气发动机220和电机240共同为驱动螺旋桨210的转动提供扭矩。
118.第二种类型的船舶的pto模式中,集合控制组件291向切换控制组件292和能量管理组件293发送pto模式指令。这样,集合控制组件291通过切换控制组件292使第一离合器230接合。集合控制组件291通过能量管理组件293控制开关组件导通,以及控制电源组件250停止向电机240输送电能。此时燃气发动机220为驱动螺旋桨210的转动提供扭矩。同时燃气发动机220驱动电机240的转轴241的转动,以使电机240发电,此时电源组件250和电机240电连接,以存储电机240提供的电能。pto模式中,电机240提供的电能也可以输送至电网290,以为船舶提供电能。
119.需要说明的是第二种类型的船舶中的燃气发动机220的输出轴221、电力变换部件251、整流器252、直流母排253、逆变器254、蓄能部件255、第一dc-dc变换器256、电容输出端257、超级电容258、超级电容管理系统259、第二dc-dc变换器260、电池输出端261、蓄电池262、电池管理系统263,以及电网290大致相同于第一种类型的船舶的燃气发动机120的输出轴121、电力变换部件151、整流器152、直流母排153、逆变器154、蓄能部件155、第一dc-dc变换器156、电容输出端157、超级电容158、超级电容管理系统159、第二dc-dc变换器160、电池输出端161、蓄电池162、电池管理系统163,以及电网190。第二种类型的船舶的其他设置也大致相同于第一种类型的船舶,这里不再赘述。
120.本实施方式的船舶用设备的选型方法可以用于确定前述的电机的功率、燃气发动机的功率、蓄电池的容量,以及超级电容的容量(电容值)。
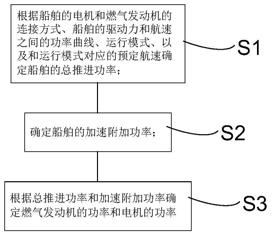
121.如图3所示,选型方法包括:
122.s1、根据船舶的电机和燃气发动机的连接方式、船舶的驱动力和航速之间的功率曲线、运行模式、以及和运行模式对应的预定航速确定船舶的总推进功率;
123.s2、确定船舶的加速附加功率;
124.s3、根据总推进功率和加速附加功率确定燃气发动机的功率和电机的功率。
125.选型方法具体包括:
126.步骤1、确定船舶的电机和燃气发动机的连接方式是并联方式还是串联方式。
127.如上所述,一些船舶中电机和燃气发动机之间的连接方式为并联方式(第一种类
型的船舶),另一些船舶中电机和燃气发动机之间的连接方式为串联方式(第二种类型的船舶)。在确定前述的电机的功率和燃气发动机的功率时,先确定船舶的电机和燃气发动机的连接方式为并联方式还是串联方式。然后根据船舶的电机和燃气发动机的连接方式以及后续的步骤确定电机的功率和燃气发动机的功率。需要说明的是,船舶的电机和燃气发动机的连接方式是并联方式还是串联方式可以根据船舶的具体使用情况进行选择。
128.步骤2、确定船舶的运行模式,以及和运行模式对应的预定航速。
129.如前所述,船舶的运行模式包括燃气推进模式、pth模式、pti模式,以及pto模式。在确定船舶的电机的功率和燃气发动机的功率时,先确定船舶需要的运行模式。需要说明的是,本实施方式可以选择燃气推进模式、pth模式、pti模式,以及pto模式中的一种或多种。对于每个所确定的运行模式,确定与之对应的预定航速。例如本实施方式中,船舶的运行模式需要包括燃气推进模式、pth模式、pti模式,以及pto模式。此时确定船舶的运行模式,以及和运行模式对应的预定航速为:燃气推进模式、和燃气推进模式对应的第一预定航速、pth模式、和pth模式对应的第二预定航速、pti模式、和pti模式对应的第三预定航速、pto模式,以及和pto模式对应的第四预定航速。需要说明的是,船舶的运行模式和对应的预定航速可以根据需要进行选择。例如可以根据船舶的航行环境【航行环境包括航行距离(近海或远洋)、航行区域(太平洋、印度洋,大西洋或者内陆水域)、航行区域的风速,以及水速】确定船舶需要的运行模式,及对应的预定航速。
130.步骤3、确定船舶的驱动力和航速之间的功率曲线。
131.在确定前述的电机的功率和燃气发动机的功率时,先确定船舶的驱动力和航速之间的功率曲线。船舶的驱动力和航速之间的功率曲线可以根据需要进行选择。例如该功率曲线大致相同于同等吨位、同等使用工况的现有船舶的驱动力和航速之间的功率曲线。
132.步骤4、根据连接方式、功率曲线、运行模式、以及预定航速确定船舶的总推进功率。
133.需要说明的是,在步骤4之前,步骤1至步骤3之间没有先后顺序要求,本领域技术人员可以根据需要设置步骤1至步骤3之间的先后顺序。
134.使用前述的船舶的电机和燃气发动机的连接方式、船舶的驱动力和航速之间的功率曲线、船舶的运行模式,以及和运行模式对应的预定航速作为输入条件。通过软件(例如中国船舶及海洋工程设计研究院的shippower软件、美国hydrocomp公司的propcad/propexpert/navcad软件、澳大利亚的maxsurf软件、美国的freeship软件、荷兰的delftship软件等)计算,进而确定船舶的总推进功率,然后根据总推进功率确定电机的功率和燃气发动机的功率。
135.步骤4、确定船舶的加速附加功率。
136.船舶航行的过程中,如果船舶需要进行加速,则需要向螺旋桨提供更大的功率(扭矩),以使船舶可以获得加速度。本实施方式中,船舶以前述的预定航速在与之对应的运行模式下航行时,由燃气发动机和/或电机承担船舶的驱动扭矩。当船舶需要进行加速时,由电机向螺旋桨提供加速所需要增加的加速附加功率。因此可以先确定船舶的加速附加功率,然后根据加速附加功率和前述的总推进功率确定电机的功率。
137.优选地,根据船舶速度阻力曲线rs=f(vs)和燃气发动机的转速变化曲线ne=fe(t)确定船舶的加速附加功率。
138.具体的,如图4所示,确定船舶的加速附加功率的步骤包括:
139.步骤s41、确定船舶速度阻力曲线、燃气发动机的转速变化曲线,以及燃气发动机的转速ne的转速初始值n
eo
。
140.船舶速度阻力曲线(速度和阻力之间的曲线)可以根据需要预先确定。例如该船舶速度阻力曲线大致相同于同等吨位、同等使用工况的现有船舶的船舶速度阻力曲线。
141.燃气发动机的转速变化曲线(燃气发动机的输出轴的转速和时间之间的曲线)可以根据需要预先确定。例如燃气发动机的转速变化曲线大致相同于同等吨位、同等使用工况的现有船舶的内燃机的转速变化曲线。
142.转速初始值n
eo
可以根据需要预先设置。例如转速初始值n
eo
可以大致相同于同等吨位、同等使用工况的现有船舶以前述的预设航速匀速航行时,其内燃机的输出轴的转速。
143.步骤s42、根据燃气发动机的转速变化曲线确定当前的燃气发动机转速ne。
144.本实施方式中,每间隔预设时长(例如1s)重新执行步骤s42至s58,以确定当前的燃气发动机转速ne、当前的船舶航速vs,以及和当前的燃气发动机转速ne对应的当前加速功率
△
p。
145.第一次执行步骤s42时,可以将转速初始值n
eo
确定为当前的燃气发动机转速ne。后续每一次执行步骤s42时可以根据上一个燃气发动机转速ne和燃气发动机的转速变化曲线确定当前的燃气发动机转速ne。例如第二次执行步骤s42时,可以根据第一次确定的燃气发动机转速ne和燃气发动机的转速变化曲线确定当前的燃气发动机转速ne。
146.步骤s43、根据当前的燃气发动机转速ne和轴系的传动比i(燃气发动机和螺旋桨之间的轴系的传动比)确定当前的螺旋桨转速n
p
。
147.优选地,可以根据公式(41)确定当前的螺旋桨转速n
p
。
148.ne/i=n
p
ꢀꢀ
(41)
149.步骤s44、确定当前的船舶航速vs。
150.在确定加速附加功率前,可以预先确定船舶航速vs的航速初始值v
s0
。例如航速初始值v
s0
可以是前述的预设航速。第一次执行步骤s44时,可以将航速初始值v
s0
确定为当前的船舶航速vs。后续每一次执行步骤s44时,可以由上一次执行的后文的步骤s45至步骤s53重新确定的最新船舶航速vs′
,然后将该最新船舶航速vs′
确定为当前的船舶航速vs。
151.步骤s45、根据当前的船舶航速vs确定当前的推力减额分数t和当前的半流分数ω。
152.推力减额分数t、半流分数ω与船舶航速vs成函数关系。每一个船舶航速vs都有与之对应的一个推力减额分数t和一个半流分数ω。该函数关系为现有技术,这里不再赘述。这样,可以通过当前的船舶航速vs确定当前的推力减额分数t和当前的半流分数ω。
153.步骤s46、通过公式(42),并且根据当前的半流分数ω和当前的船舶航速vs确定当前的螺旋桨进速v
p
。
[0154]vp
=vs(1-ω)
ꢀꢀ
(42)
[0155]
步骤s47、通过公式(43),并且根据当前的螺旋桨进速v
p
、当前的螺旋桨转速n
p
,以及螺旋桨的直径尺寸d确定当前的船舶进速r
p
。
[0156]
[0157]
步骤s48、通过公式(44),并且根据当前的螺旋桨进速v
p
和当前的船舶进速r
p
确定当前的进速系数μ。
[0158]
μ=v
p
/r
p
ꢀꢀ
(44)
[0159]
步骤s49、根据当前的进速系数μ确定与之对应的当前的螺旋桨推力系数c
t
和当前的螺旋桨扭矩系数cq。
[0160]
螺旋桨推力系数c
t
、螺旋桨扭矩系数cq与进速系数μ成函数关系。每一个进速系数μ都有与之对应的一个螺旋桨推力系数c
t
和一个螺旋桨扭矩系数cq。该函数关系为现有技术,这里不再赘述。这样可以通过当前的进速系数μ确定与之对应的当前的螺旋桨推力系数c
t
和当前的螺旋桨扭矩系数cq。
[0161]
步骤s50、通过公式(45),并且根据当前的螺旋桨推力系数c
t
、当前的船舶进速r
p
、螺旋桨的直径尺寸d,以及承载船舶的水(例如海水)的密度ρ确定当前的螺旋桨推力t
p
。
[0162][0163]
本实施方式中,步骤s50之后,执行后续的步骤s51至步骤s53以确定最新船舶航速vs′
。并返回执行步骤s44,以将该最新船舶航速vs′
确定为当前的船舶航速vs。步骤s50之后,还执行后续的步骤s54至步骤s58,以确定和当前的燃气发动机转速ne对应的当前加速功率
△
p。步骤s58之后,执行步骤s59,以确定加速附加功率。
[0164]
步骤s51、通过公式(46),并且根据当前的螺旋桨推力t
p
、当前的推力减额分数t、以及螺距系数t
p
确定当前的有效船舶推力t。
[0165]
t=t
p
(1-t
·
t
p
)
ꢀꢀ
(46)
[0166]
其中,螺距系数t
p
可以由公式(47)确定。
[0167][0168]
其中,h/d为螺旋桨的面螺距h和螺旋桨的直径尺寸d的比值(螺距比)。
[0169]
步骤s52、根据船舶速度阻力曲线和当前的船舶航速vs确定当前的船舶阻力rs。
[0170]
步骤s53、通过公式(48),并且根据当前的船舶阻力rs、当前的有效船舶推力t、以及船舶的质量m确定最新船舶航速vs′
。步骤s53之后返回步骤s44、以将最新船舶航速vs′
确定为当前的船舶航速vs。
[0171][0172]
步骤s54、通过公式(49),并且根据当前的螺旋桨扭矩系数cq、当前的船舶进速r
p
、螺旋桨的直径尺寸d,以及承载船舶的水的密度ρ确定当前的螺旋桨输出扭矩m
p
。
[0173][0174]
步骤s55、通过公式(50),并且根据当前的螺旋桨输出扭矩m
p
、效率η(前述的轴系的传动效率和回转效率的和),以及轴系的传动比i确定当前的燃气发动机输出扭矩me。
[0175]
me=m
p
/η
×iꢀꢀ
(50)
[0176]
步骤s56、通过公式(51),并且根据当前的燃气发动机转速ne和当前的燃气发动机
输出扭矩me确定当前的燃气发动机输出功率pe。
[0177]
pe=2πnemeꢀꢀ
(51)
[0178]
步骤s57、通过公式(52),并且根据当前的燃气发动机转速ne和常数c确定当前的燃气发动机的稳态输出功率pe′
(船舶以当前的船舶航速vs匀速航行时,燃气发动机的输出功率)。
[0179]
pe'=cn
e3
ꢀꢀ
(52)
[0180]
步骤s58、通过公式(53),并且根据当前的燃气发动机的稳态输出功率pe′
和当前的燃气发动机输出功率pe确定当前的加速功率
△
p。
[0181]
δp=p
e-pe'
ꢀꢀ
(53)
[0182]
需要说明的是,对于每一次执行步骤s42至s58,均可以确定一个当前的加速功率
△
p。也就是说,经过多次反复执行步骤s42至s58,可以确定多个当前的加速功率
△
p。
[0183]
步骤s59、将前述的所有加速功率
△
p中的最大值确定为加速附加功率。
[0184]
本实施方式中,根据船舶速度阻力曲线和燃气发动机的转速变化曲线确定船舶的加速附加功率。由此,根据船舶的速度的动态变化确定加速附加功率,可以更加准确的确定加速附加功率。
[0185]
前述的步骤s41至s59可以通过软件(例如amesim),根据前述的步骤s41至s59中的公式建立的模型,进而确定加速附加功率。由此,可以更加方便的确定加速附加功率。
[0186]
在未给出的实施方式中,本领域技术人员也可以根据试验确定船舶的加速附加功率。例如加速附加功率可以为现有的由内燃机驱动的船舶的正常航行时的功率和加速时的功率之差。
[0187]
步骤5、根据总推进功率和加速附加功率确定船舶的燃气发动机的功率和电机的功率。
[0188]
电机的功率和燃气发动机的功率之和≥总推进功率。由此可以确定电机的功率和燃气发动机的功率,以使船舶可以适用于各种工况和航行环境。
[0189]
优选地,电机的功率≥加速附加功率。由此,电机可以提供船舶加速航行时需要的附加功率。
[0190]
优选地,总推进功率和加速附加功率之差≤燃气发动机的功率。由此,燃气发动机的功率可以提供船舶以预定速度在和该预定速度对应的运行模式航行时需要的功率。
[0191]
优选地,燃气发动机的功率>电机的功率。由此,在pti模式下,以和pti模式对应的预定航速航行的船舶中,燃气发动机承担驱动螺旋桨转动的大部分扭矩。
[0192]
优选地,燃气发动机的功率和总推进功率的比值大于75%。由此,在pti模式下,以和pti模式对应的预定航速航行的船舶中,尽量增加燃气发动机承担驱动螺旋桨转动的扭矩的比例。
[0193]
优选地,若船舶在pto模式下需要与船舶的发电机组长时间并网。则电机140的功率+船舶的发电机组的功率≥全船用电的负荷。若船舶在pto模式下不需要与船舶的发电机组长时间并网,则电机140的功率≥全船用电的负荷。
[0194]
在确定燃气发动机的功率和电机的功率后,选型方法还包括:
[0195]
步骤6、根据公式(1)确定蓄电池的容量
[0196]
eb=pm×
t1×
ηb×
ηd×
ηm×
ηs×
η
l
ꢀꢀ
(1)
[0197]
步骤7、根据公式(2)确定超级电容的容量
[0198]
ec=pm×
t2×
ηc×
ηd×
ηm×
ηsꢀꢀ
(2)
[0199]
其中,
[0200]
eb为蓄电池的容量;
[0201]
ec为超级电容的容量;
[0202]
pm为电机的功率;
[0203]
t1为进出港所需的时间;
[0204]
t2为船舶加速的时间;
[0205]
ηb为蓄电池效率;
[0206]
ηd为电力变换部件的效率;
[0207]
ηm为电机效率;
[0208]
ηs为传动效率;
[0209]
η
l
为电池寿命折减系数;以及
[0210]
ηc为超级电容的效率。
[0211]
前述的t1、t2、ηb、ηd、ηm、ηs、η
l
,以及ηc可以根据需要进行设置。
[0212]
在确定蓄电池的容量eb后,可以根据蓄电池的容量eb确定蓄电池的参数。然后根据直流母排的电压,以及电力变换部件的最大承受电流设置蓄电池的拓扑结构。
[0213]
在确定超级电容的容量ec后,可以根据超级电容的容量ec确定超级电容参数。然后根据直流母排的电压,以及电力变换部件的最大承受电流设置超级电容的拓扑结构。
[0214]
在步骤7之后,可以根据电机的功率和燃气发动机的功率确定和燃气推进模式、pth模式、pti模式,以及pto模式一一对应的第一预定航速、第二预定航速、第三预定航速,以及第四预定航速。
[0215]
本实施方式中,船舶由电机和/或燃气发动机提供动力航行,燃料的成本低,此外燃气发动机燃烧燃气的产物清洁环保,并且根据船舶的电机和燃气发动机的连接方式、船舶的驱动力和航速之间的功率曲线、运行模式、以及和运行模式对应的预定航速确定船舶的总推进功率,然后根据总推进功率和加速附加功率确定电机和燃气发动机的功率,可以使船舶更加适应各种工况和航行环境。
[0216]
本发明已经通过上述实施例进行了说明,但应当理解的是,上述实施例只是用于举例和说明的目的,而非意在将本发明限制于所描述的实施例范围内。此外本领域技术人员可以理解的是,本发明并不局限于上述实施例,根据本发明的教导还可以做出更多种的变型和修改,这些变型和修改均落在本发明所要求保护的范围以内。本发明的保护范围由附属的权利要求书及其等效范围所界定。
[0217]
除非另有定义,本文中所使用的技术和科学术语与本发明的技术领域的技术人员通常理解的含义相同。本文中使用的术语只是为了描述具体的实施目的,不是旨在限制本发明。本文中出现的诸如“部件”等术语既可以表示单个的零件,也可以表示多个零件的组合。本文中出现的诸如“安装”、“设置”等术语既可以表示一个部件直接附接至另一个部件,也可以表示一个部件通过中间件附接至另一个部件。本文中在一个实施方式中描述的特征可以单独地或与其它特征结合地应用于另一个实施方式,除非该特征在该另一个实施方式中不适用或是另有说明。
[0218]
本发明已经通过上述实施方式进行了说明,但应当理解的是,上述实施方式只是用于举例和说明的目的,而非意在将本发明限制于所描述的实施方式范围内。本领域技术人员可以理解的是,根据本发明的教导还可以做出更多种的变型和修改,这些变型和修改均落在本发明所要求保护的范围以内。