1.本实用新型涉及水上垃圾清理技术领域,尤其涉及一种水面巡航保洁机器人。
背景技术:
2.水是生命之源、农业命脉,水质下降导致水资源匮乏,进一步造成工厂停产、农业减产甚至绝收。我国是一个水域面积宽广的大国,水域覆盖面贯彻东西南北,但人均用水量不到世界平均的1/4,加之近些年环境的污染与水资源的匮乏,引起了国家对环境治理的注意,加速开展生态文明建设,其中,清理河道垃圾成了目前治理水环境、提升水质的重要补救措施之一。随着各领域的不断发展,船舶制造业有着明显的进步,保洁机器人逐渐进入大众的视野,其以安全、智能、高效和便于操控等优势渐渐取代了传统的人工打捞,但在保洁机器人投入使用后,发现还存在以下不足之处:
3.1、现有水上保洁机器人普遍采用传送带结构进行打捞,存在动作大、噪音大的问题,只适合针对大面积水域进行周期性的使用。具体的,若长期使用,会对周围环境带来噪音污染,影响人们的生活;针对小面积水域,若采用传送带式的保洁机器人,则存在能耗高的问题。
4.2、基于传送带式保洁机器人具有动作大和噪音大的问题,若在旅游景点使用,会影响旅客的出游心情,且传送带的打捞动作对游客存在一定的安全隐患,总的来说,对景区的发展尤为不利。
5.3、现有保洁机器人的聚料机构,是采用旋转控制的结构控制聚料挡板的开合,此结构在聚料挡板的开合期间需要克服的水阻力较大,不仅耗能,且容易造成驱动电机疲劳磨损,影响到聚料机构的使用寿命,后期维护成本大。
技术实现要素:
6.针对上述现有技术的不足,本技术方案提供一种水面巡航保洁机器人,采用速度差的原理收集水上垃圾,动作幅度小,可通过自动巡航实现水面垃圾清理。
7.具体通过以下技术方案实现:
8.一种水面巡航保洁机器人(以下统称机器人),包括漂浮装置、聚料机构、垃圾汇集框和推进装置;所述漂浮装置包括甲板、左侧浮腔、右侧浮腔和浮体盖;左侧浮腔和右侧浮腔分别设置于甲板的两侧,并通过甲板固定连接,左侧浮腔和右侧浮腔中密封设置有电气控制系统和供电电源;浮体盖与左侧浮腔和右侧浮腔的顶部固定连接,且浮体盖、左侧浮腔和右侧浮腔配合构成一个前侧、后侧和底部敞口设置的工作舱;浮体盖的顶部设置有舱盖,浮体盖的前侧开设有视觉腔,视觉腔中设置有视觉定位系统,浮体盖的后侧设置有通讯单元,视觉系统和通讯单元分别与电气控制系统电性连接;所述垃圾汇集框设置于工作舱中,工作舱中设置有用于放置垃圾汇集框的镂空支架;垃圾汇集框面向工作仓前侧的一面敞口设置,工作舱的内部还设置有用于遮挡垃圾汇集框敞口处的电动开合挡板机构,电动开合挡板机构与电气控制系统电性连接;所述聚料机构包括两个分别处于漂浮装置两侧,并相
互对称设置的聚料单元,且两个聚料单元分别与电气控制系统电性连接;所述推进装置设置于漂浮装置的后侧,并与电气控制系统电性连接。
9.优选的,所述视觉系统包括摄像头、激光雷达和gps。
10.优选的,所述左侧浮腔和右侧浮腔的顶部都设置了防水充电接口和带有密封盖的系统检修口,且防水充电接口和系统检修口都处于工作舱的内部。
11.优选的,所述推进装置包括与水面浮体固定连接的安装架、在安装架上并排设置的若干螺旋桨推进器和用于使螺旋桨推进器与电气控制系统电性连接的螺旋桨线,且螺旋桨线与螺旋桨推进器一一对应;所述左侧浮腔和右侧浮腔的后侧都嵌入设置有若干用于连接所述螺旋桨线的防水接头。
12.优选的,所述舱盖为电动舱盖,包括盖体、电动防水撑杆和撑杆固定座;撑杆固定座与所述浮体盖固定连接,盖体的一侧与浮体盖铰接,电动防水撑杆的两端分别与盖体和撑杆固定座连接。
13.优选的,所述聚料机构包括驱动电机、齿轮、齿条、可弯曲聚料挡板、上弯折轨道和下弯折轨道;上弯折轨道和下弯折轨道相互平行设置,且上弯折轨道和下弯折轨道分别与漂浮装置固定连接;可弯曲聚料挡板的上下两侧分别与上弯折轨道和下弯折轨道滑动连接;齿条与上弯折轨道相互平行,并与可弯曲聚料挡板固定连接;齿轮相互啮合,并与驱动电机的转轴同轴固定连接;驱动电机与上弯折轨道或漂浮装置固定连接。进一步的,所述可弯曲聚料挡板为尼龙挡板或四氟乙烯挡板。
14.优选的,所述电动开合挡板机构包括垃圾挡板和与电气控制系统电性连接的电动舵机,垃圾挡板与电动舵机的旋转部件固定连接。
15.优选的,所述垃圾汇集框的框壁呈网状结构或者垃圾汇集框上设置有若干滤水孔。
16.优选的,所述漂浮装置的两侧设置有防撞轮。
17.本技术方案与与现有技术相比,存在以下优点:
18.1)相对于现有技术,本技术方案无传送带打捞结构,而是利用机器人与水流的速度差的原理实现水面垃圾的汇集,结构更加简单,具有低能耗、底使用成本的特点,且动作弧度小,基本无噪音,可支持长时间续航使用,尤其适用于景区水域以及其他小面积水域,适应了各景区的持续发展趋势。
19.2)摄像头用于采集现场图像信息,可配合电气控制系统和激光雷达实现本技术方案的自主巡航(自主路径规划及导航的自主作业状态)功能,同时还可拓展多项业务功能,包括自主识别、探测、搜寻水面物质,配合gps,可实现对物质精准识别、定位与追踪、自主避障防止搁浅等等,使全自动无人打捞作业更加智能化,为机器人的发展打下了良好的基础。
20.3)本技术方案将防水充电接口和系统检修口设置于左侧浮腔和右侧浮腔的顶部,打开电动舱盖即可实现充电和检修维护工作,防止了左侧浮腔和右侧浮腔中进水,且使充电和检修维护工作更加简单。
21.4)本技术方案的推进装置中采用了若干螺旋桨推进器配合控制机器人的航速和航向,结构简单,组装方便,易于控制和维修。
22.5)防水接头的设置为推进装置提供了电性连接条件,防水接头设置于水面浮体的外部,更加方便了推进装置的安装与拆卸,使机器人的组装工作更加简单。
23.6)可通过电气控制系统控制电动防水撑杆作动,进一步实现盖体的自动开合,结构设计简单巧妙,且易于控制,加深了本技术方案的自动化程度。
24.7)水面浮体的两侧设置有防撞轮,可有效防止机器人与周围设置产生碰撞而出现损伤。
25.8)本技术方案的聚料机构通过融入滑轨技术,实现采用收展运动的方式代替了现有的旋转开合方式,相对于旋转开合方式,本技术方案在使用期间,可弯曲聚料挡板的动作弧度小,可最大限度的减小聚可弯曲聚料挡板需要克服的水阻力,由此一来,可最大限度的减小耗能,尽可能的减缓了动力组件的疲劳磨损,增加了到聚料机构的使用寿命,从而减小后期维护成本;另外,本技术方案采用轨道组件、可弯曲聚料挡板和动力组件的配合结构,架构简单巧妙,易于安装使用。
附图说明
26.本实用新型的前述和下文具体描述在结合以下附图阅读时变得更清楚,其中:
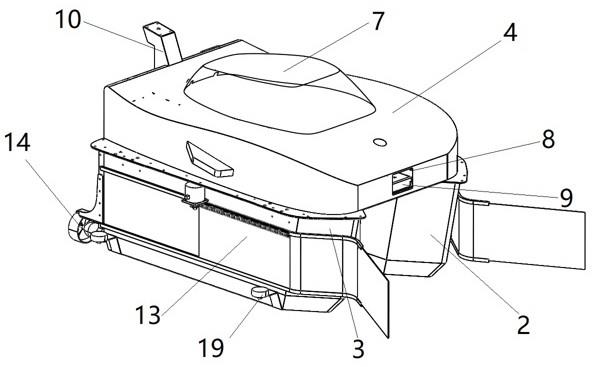
27.图1为本年技术方案的整体结构示意图;
28.图2为本技术方案的侧面剖视结构示意图;
29.图3为本技术方案的后视结构示意图;
30.图4为本技术方案的俯视结构示意图;
31.图5为本技术方案的正面结构示意图;
32.图6为聚料单元结构示意图;
33.图中:
34.1、甲板;2、左侧浮腔;3、右侧浮腔;4、浮体盖;5、工作舱;6、镂空支架;7、舱盖;7.1、盖体;7.2、电动防水撑杆;7.3、撑杆固定座;8、视觉腔;9、视觉定位系统;10、通讯单元;11、垃圾汇集框;11.1、滤水孔;12、电动开合挡板机构;12.1、垃圾挡板;12.2电动舵机;13、聚料单元;13.1、驱动电机;13.2、齿轮;13.3、齿条;13.4、可弯曲聚料挡板;13.5、上弯折轨道;13.6下弯折轨道;14、推进装置;14.1、安装架;14.2、螺旋桨推进器;14.3、螺旋桨线;15、防水接头;16、防水充电接口;17、密封盖;18、系统检修口;19、防撞轮。
具体实施方式
35.下面通过几个具体的实施例来进一步说明实现本实用新型目的技术方案,需要说明的是,本实用新型要求保护的技术方案包括但不限于以下实施例。
36.实施例1
37.本实用新型公开了一种水面巡航保洁机器人,作为本实用新型一种基本的实施方案,如图1所示,包括漂浮装置、聚料机构、垃圾汇集框11和推进装置14;漂浮装置包括甲板1、左侧浮腔2、右侧浮腔3和浮体盖4;左侧浮腔2和右侧浮腔3分别设置于甲板1的两侧,并通过甲板1固定连接,左侧浮腔2和右侧浮腔3中密封设置有电气控制系统和供电电源;浮体盖4与左侧浮腔2和右侧浮腔3的顶部固定连接,且浮体盖4、左侧浮腔2和右侧浮腔3配合构成一个前侧、后侧和底部敞口设置的工作舱5;浮体盖4的顶部设置有舱盖7,浮体盖4的前侧开设有视觉腔8,视觉腔8中设置有视觉定位系统9,浮体盖4的后侧设置有通讯单元10,视觉系统和通讯单元10分别与电气控制系统电性连接;垃圾汇集框11设置于工作舱5中,工作舱5
中设置有用于放置垃圾汇集框11的镂空支架6;垃圾汇集框11面向工作仓前侧的一面敞口设置,工作舱5的内部还设置有用于遮挡垃圾汇集框11敞口处的电动开合挡板机构12,电动开合挡板机构12与电气控制系统电性连接;聚料机构包括两个分别处于漂浮装置两侧,并相互对称设置的聚料单元,且两个聚料单元分别与电气控制系统电性连接;推进装置14设置于漂浮装置的后侧,并与电气控制系统电性连接。
38.其中,水面浮体用于实现本技术方案在水上的漂浮功能,同时为电气控制系统和供电电源提供空间布设条件,水面浮体整体呈对称结构,结构设计巧妙,确保了机器人在水面漂浮的稳定性。在对机器人进行组装的过程中,将供电电池接入电气控制系统,实现对整个机器人工作系统的供电,电气控制系统一般称为电气设备二次控制回路,由若干电气原件组合而成,其中包含了相应的软件和硬件设施,用于实现对某个或某些对象的控制,从而保证被控设备安全、可靠地运行,其主要功能有:自动控制、保护、监视和测量,进一步的,不同的设备有不同的控制回路,本技术方案则可以根据具体的控制需要,设计专门的电气控制系统。浮体盖4的设置为机器人创造了工作腔这样良好的工作空间条件,工作腔的形成,消除了雨天雨水的落入对垃圾打捞工作的影响,确保了雨天的垃圾打捞效果,在刮风时,气流会沿着浮体盖4表面流动,最大限度的减小了风的阻力,进一步使本技术方案风雨交加的恶劣环境也能正常使用。工作舱5的前侧、后侧和底部敞口设置,确保水流能顺利通过,可极大限度的减小水的阻力,在水流通过工作舱5的过程中,垃圾在水流的作用下进入垃圾汇集框11。舱盖7的设置可实现在不拆卸浮体盖4的条件下实现垃圾汇集框11的取出与放入,可简单、快速的完成垃圾处理工作。通讯单元10包括了通讯尾翼和封装与通讯尾翼内部的通讯系统。通讯尾翼的设置不仅美观,还可调节机器人的重心,确保保洁机器人在水面漂浮的稳定性;另外,通讯系统的设置可实现对保洁机器人的远程控制,即,可通过遥控器控制机器人的工作状态,包括机器人的航速和航向,以及聚料机构、电动舱盖7和电动开合挡板机构12的打开和关闭等。电动开合挡板机构12的设置可防止垃圾从垃圾汇集框11中流出。聚料机构将垃圾聚集在漂浮装置的前侧,尤其是工作腔的前侧敞口处,基于机器人与水流的速度差,漂浮装置前侧的垃圾会自动进入到垃圾汇集框11中。
39.相对于现有技术,本技术方案无传送带打捞结构,而是利用机器人与水流的速度差的原理实现水面垃圾的汇集,结构更加简单,具有低能耗、底使用成本的特点,且动作弧度小,基本无噪音,可支持长时间续航使用,尤其适用于景区水域以及其他小面积水域,适应了各景区的持续发展趋势。
40.实施例2
41.本实用新型公开了一种水面巡航保洁机器人,作为本实用新型一种基本的实施方案,即实施例1中,视觉系统包括摄像头、激光雷达和gps。摄像头用于采集现场图像信息,可配合电气控制系统和激光雷达实现本技术方案的自主巡航(自主路径规划及导航的自主作业状态)功能,同时还可拓展多项业务功能,包括自主识别、探测、搜寻水面物质,配合gps,可实现对物质精准识别、定位与追踪、自主避障防止搁浅等等,使全自动无人打捞作业更加智能化,为机器人的发展打下了良好的基础。
42.实施例3
43.本实用新型公开了一种水面巡航保洁机器人,作为本实用新型一种基本的实施方案,即实施例1中,左侧浮腔2和右侧浮腔3的顶部都设置了防水充电接口16和带有密封盖17
的系统检修口18,且防水充电接口16和系统检修口18都处于工作舱5的内部。本技术方案将防水充电接口16和系统检修口18设置于左侧浮腔2和右侧浮腔3的顶部,打开电动舱盖7即可实现充电和检修维护工作,防止了左侧浮腔2和右侧浮腔3中进水,且使充电和检修维护工作更加简单。
44.实施例4
45.本实用新型公开了一种水面巡航保洁机器人,作为本实用新型一种基本的实施方案,即实施例1中,推进装置14包括与水面浮体固定连接的安装架14.1、在安装架14.1上并排设置的若干螺旋桨推进器14.2和用于使螺旋桨推进器14.2与电气控制系统电性连接的螺旋桨线14.3,且螺旋桨线14.3与螺旋桨推进器14.2一一对应;左侧浮腔2和右侧浮腔3的后侧都嵌入设置有若干用于连接螺旋桨线14.3的防水接头15。在实际使用中,如图3所示,设置6个推进螺旋桨推进器14.2,电气控制系统通过螺旋桨线14.3对每个螺旋桨推进器14.2单独提供控制信号,具体每个控制螺旋桨推进器14.2的启动、停止和转速,6个推进螺旋桨推进器14.2相互配合,以控制机器人的航向和航速。本技术方案的推进装置14中采用了若干螺旋桨推进器14.2配合控制机器人的航速和航向,结构简单,组装方便,易于控制和维修。另外,防水接头15可为金属防水接头15,具有可靠的防水作用。
46.实施例5
47.本实用新型公开了一种水面巡航保洁机器人,作为本实用新型一种基本的实施方案,即实施例1中,舱盖7为电动舱盖7,包括盖体7.1、电动防水撑杆7.2和撑杆固定座7.3;撑杆固定座7.3与浮体盖4固定连接,盖体7.1的一侧与浮体盖4铰接,电动防水撑杆7.2的两端分别与盖体7.1和撑杆固定座7.3连接。可通过电气控制系统控制电动防水撑杆7.2作动,进一步实现盖体7.1的自动开合,结构设计简单巧妙,且易于控制,加深了本技术方案的自动化程度。
48.实施例6
49.本实用新型公开了一种水面巡航保洁机器人,作为本实用新型一种基本的实施方案,即实施例1中,聚料机构包括驱动电机、齿轮、齿条、可弯曲聚料挡板、上弯折轨道和下弯折轨道;上弯折轨道和下弯折轨道相互平行设置,且上弯折轨道和下弯折轨道分别与漂浮装置固定连接;可弯曲聚料挡板的上下两侧分别与上弯折轨道和下弯折轨道滑动连接;齿条与上弯折轨道相互平行,并与可弯曲聚料挡板固定连接;齿轮相互啮合,并与驱动电机的转轴同轴固定连接;驱动电机与上弯折轨道或漂浮装置固定连接。机器人根据工作状态,控制驱动电机通电,进一步控制可弯曲聚料挡板沿轨道组件向前(对应水上保洁机器人的前方)滑动或向后(对应水上保洁机器人的后方)滑动,如此便实现了可弯曲聚料挡板的收展。具体的,当驱动电机的转轴正转时,齿条随着齿轮的转动向前(对应保洁机器人的前侧)移动,进一步带动可弯曲聚料挡板沿轨道组件向前移动,即,可弯曲聚料挡板伸展;当驱动电机反转时,随着齿轮的转动向后(对应保洁机器人的后侧)移动,进一步带动可弯曲聚料挡板沿轨道组件向后移动,即,可弯曲聚料挡板收回。本技术方案通过融入滑轨技术,实现采用收展运动的方式代替了现有的旋转开合方式,相对于旋转开合方式,本技术方案在使用期间,可弯曲聚料挡板的动作弧度小,可最大限度的减小聚可弯曲聚料挡板需要克服的水阻力,由此一来,可最大限度的减小耗能,尽可能的减缓了动力组件的疲劳磨损,增加了到聚料机构的使用寿命,从而减小后期维护成本;另外,本技术方案采用轨道组件、可弯曲聚
料挡板和动力组件的配合结构,架构简单巧妙,易于安装使用。
50.进一步的,为克服水的阻力以确保聚料效果,可弯曲聚料挡板需要具有一定的强度,因此,可弯曲聚料挡板为尼龙挡板或四氟乙烯挡板,取材方便且成本低,不仅满足可弯曲条件,同时满足克服水阻力的强度条件。
51.实施例7
52.本实用新型公开了一种水面巡航保洁机器人,作为本实用新型一种基本的实施方案,即实施例1中,电动开合挡板机构12包括垃圾挡板12.1和与电气控制系统电性连接的电动舵机,垃圾挡板12.1与电动舵机的旋转部件固定连接。电动舵机由电动机、传动部件和离合器组成,电动机用于控制传动部件旋转,进一步控制垃圾挡板12.1旋转,其中垃圾挡板12.1旋转是以自身的一条边作为轴,该轴平行或垂直于水面,垃圾挡板12.1可朝机器人的前方或后方旋转,优选的,朝前方旋转,如此一来,当垃圾挡板12.1放下时,不仅不会将垃圾从垃圾汇集框11推出,还可能会将垃圾汇集框11外部的垃圾推进垃圾汇集框11。
53.进一步的,为确保垃圾汇集框11的滤水效果,垃圾汇集框11的框壁呈网状结构或者垃圾汇集框11上设置有若干滤水孔11.1。
54.进一步的,漂浮装置的两侧设置有防撞轮19,防止机器人与周围设置产生碰撞而出现损伤。