1.本发明涉及环保技术领域,尤其涉及一种智能垃圾清扫机器。
背景技术:
2.智能垃圾桶是一种日常生活用品,一般的家用智能垃圾桶,人们在使用前,会预先在智能垃圾桶内套设一次性的垃圾袋,需要丢垃圾时将垃圾袋扎好后从智能垃圾桶内取出。
3.但是现有技术中的智能垃圾桶只能固定摆放在某一位置上,而在使用过程常常不是很方便,有时还需要去自己将不小心丢在外边和垃圾桶旁边的垃圾重新丢入垃圾桶内,而扫地机器人的垃圾容量太小,不能满足大容量垃圾的需求。
4.因此,有必要提供一种新型的智能垃圾清扫机器,以克服上述缺陷。
技术实现要素:
5.本发明的目的在于提供一种新型的智能垃圾清扫机器,其功能全面,容量大,使用便捷。
6.为了达到上述目的,本发明提供一种智能垃圾清扫机器,包括垃圾桶,设置在所述垃圾桶上方的盖体以及设置在所述垃圾桶下方的行走机器人,所述垃圾桶和所述行走机器人之间还设有连接盘,所述连接盘包括圆柱形的盘体、沿所述盘体外侧圆周设置的紧固环、设置在所述盘体中心部位的支撑柱、设置在所述盘体内的隔挡片以及将所述隔挡片和所述支撑柱连接的旋转件,所述盘体上开设有用于贯通所述垃圾桶和所述行走机器人的开口部,所述隔挡片能够开启或封闭所述开口部。
7.进一步,所述隔挡片包括第一扇片、第二扇片、第三扇片以及第四扇片,所述第一扇片和第三扇片上均设有豁口部,所述第二扇片和所述第四扇片上设有磁传感器,所述豁口部与所述开口部正对设置。
8.进一步,所述垃圾桶包括内桶以及围绕所述内桶外侧圆周设置的外桶,所述外桶和所述内桶间隔形成环形的容置空间,所述容置空间内设有挡片,所述挡片将所述容置空间分割成多个存储腔。
9.进一步,所述垃圾桶还包括设置在所述内桶与所述连接盘之间用于驱动所述垃圾桶转动的驱动电机。
10.进一步,所述盖体包括环本体、设置在环本体内的负压装置以及与所述负压装置连接的吸附槽,所述环本体盖设在所述容置空间上,所述吸附槽自所述环本体向所述存储腔内延伸形成。
11.进一步,所述内桶内设有多个与所述容置空间连通的通孔。
12.进一步,所述行走机器人设有风压吸附组件,所述风压吸附组件包括吸附通道以及设置在吸附通道内的风压机,所述吸附通道与所述开口部连通。
13.与相关技术相比较,本发明的智能垃圾清扫机器通过采用将垃圾桶和行走机器人
结合,垃圾桶容量大,清扫方便,使用便捷。
附图说明
14.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图,其中:
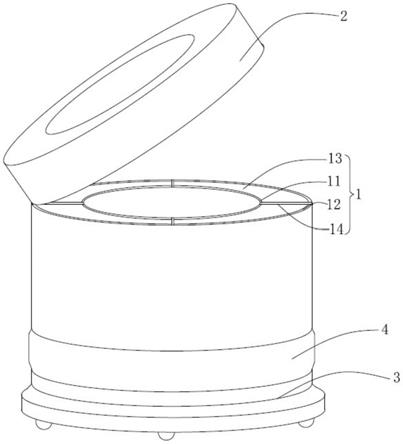
15.图1为本发明的智能垃圾清扫机器的立体图;
16.图2为本发明的智能垃圾清扫机器的剖视图;
17.图3为本发明的智能垃圾清扫机器的连接盘结构示意图
具体实施方式
18.下面将对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
19.请参阅图1,一种智能垃圾清扫机器,包括垃圾桶1,设置在所述垃圾桶1上方的盖体2以及设置在所述垃圾桶1下方的行走机器人3,所述垃圾桶1和所述行走机器人3之间还设有连接盘4。
20.请参阅图2和图3,所述连接盘4包括圆柱形的盘体41、沿所述盘体41外侧圆周设置的紧固环42、设置在所述盘体41中心部位的支撑柱43、设置在所述盘体41内的隔挡片44以及将所述隔挡片44和所述支撑柱43连接的旋转件45,所述盘体41上开设有用于贯通所述垃圾桶和所述行走机器人的开口部410,所述隔挡片44能够开启或封闭所述开口部410。
21.所述隔挡片44包括第一扇片441、第二扇片442、第三扇片443以及第四扇片444,所述第一扇片441和第三扇片443上均设有豁口部4410,所述第二扇片442和所述第四扇片444上设有磁传感器,所述豁口部4410与所述开口部410正对设置。
22.所述垃圾桶1包括内桶11以及围绕所述内桶11外侧圆周设置的外桶12,所述外桶12和所述内桶11间隔形成环形的容置空间13,所述容置空间13内设有挡片14,所述挡片14将所述容置空间13分割成多个存储腔。所述内桶11用于日常放置垃圾使用,所述容置空间13分隔成的存储腔用于进行清扫时的垃圾容置。且对应每一个所述存储腔的底部均设有电磁片,所述存储腔的顶部设有容量传感器。
23.所述垃圾桶1还包括设置在所述内桶11与所述连接盘4之间用于驱动所述垃圾桶1转动的驱动电机5。所述驱动电机5用于驱动垃圾桶1转动,以便于当一个所述存储腔满容量后,能够旋转到下一个存储腔进行垃圾存放。所述驱动电机5为两个,一个与所述垃圾桶1连接,一个与所述支撑柱43连接。
24.所述盖体2包括环本体21、设置在环本体21内的负压装置22以及与所述负压装置22连接的吸附槽23,所述环本体21盖设在所述容置空间上13,所述吸附槽23自所述环本体21向所述存储腔内延伸形成。
25.所述内桶11内设有多个与所述容置空间13连通的通孔110,所述通孔110用于通过
负压将垃圾袋吸附在所述内桶11的内侧表面。
26.所述行走机器人3设有风压吸附组件31,所述风压吸附组件31包括吸附通道311以及设置在吸附通道311内的风压机312,所述吸附通道311与所述开口部410连通,用于清扫时将垃圾传送到存储腔中。所述行走机器人还包括用于感应垃圾的垃圾感应装置32和驱动行走的驱动机构33。
27.具体的工作原理为,通过行走机器人内部的控制主板来进行控制,垃圾感应装置用于垃圾扫描,驱动机构驱动行走,风压吸附组件将垃圾吸附到吸附通道,由于此时负压装置产生负压,将吸附通道内的垃圾通过连接盘上的开口部吸附到容置空间形成的单个存储腔内,当单个存储腔内的容量传感器感应到垃圾满之后,发送信号给控制主板,控制主板发送信号给其中一个驱动电机,电机驱动隔挡片进行隔挡,磁传感器感应到与之对应的电磁片后发送一个信号给控制主板,控制主板控制电磁片消磁,同时控制另一个驱动电机转动垃圾桶,如此往复循环。
28.与相关技术相比较,本发明的智能垃圾清扫机器通过采用将垃圾桶和行走机器人结合,垃圾桶容量大,清扫方便,使用便捷。
29.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本发明的专利保护范围内。
技术特征:
1.一种智能垃圾清扫机器,包括垃圾桶,设置在所述垃圾桶上方的盖体以及设置在所述垃圾桶下方的行走机器人,其特征在于:所述垃圾桶和所述行走机器人之间还设有连接盘,所述连接盘包括圆柱形的盘体、沿所述盘体外侧圆周设置的紧固环、设置在所述盘体中心部位的支撑柱、设置在所述盘体内的隔挡片以及将所述隔挡片和所述支撑柱连接的旋转件,所述盘体上开设有用于贯通所述垃圾桶和所述行走机器人的开口部,所述隔挡片能够开启或封闭所述开口部。2.根据权利要求1所述的智能垃圾清扫机器,其特征在于:所述隔挡片包括第一扇片、第二扇片、第三扇片以及第四扇片,所述第一扇片和第三扇片上均设有豁口部,所述第二扇片和所述第四扇片上设有磁传感器,所述豁口部与所述开口部正对设置。3.根据权利要求1所述的智能垃圾清扫机器,其特征在于:所述垃圾桶包括内桶以及围绕所述内桶外侧圆周设置的外桶,所述外桶和所述内桶间隔形成环形的容置空间,所述容置空间内设有挡片,所述挡片将所述容置空间分割成多个存储腔。4.根据权利要求3所述的智能垃圾清扫机器,其特征在于:所述垃圾桶还包括设置在所述内桶与所述连接盘之间用于驱动所述垃圾桶转动的驱动电机。5.根据权利要求3所述的智能垃圾清扫机器,其特征在于:所述盖体包括环本体、设置在环本体内的负压装置以及与所述负压装置连接的吸附槽,所述环本体盖设在所述容置空间上,所述吸附槽自所述环本体向所述存储腔内延伸形成。6.根据权利要求3所述的智能垃圾清扫机器,其特征在于:所述内桶内设有多个与所述容置空间连通的通孔。7.根据权利要求1所述的智能垃圾清扫机器,其特征在于:所述行走机器人设有风压吸附组件,所述风压吸附组件包括吸附通道以及设置在吸附通道内的风压机,所述吸附通道与所述开口部连通。
技术总结
本发明提供一种智能垃圾清扫机器,设置在所述垃圾桶上方的盖体以及设置在所述垃圾桶下方的行走机器人,所述垃圾桶和所述行走机器人之间还设有连接盘,所述连接盘包括圆柱形的盘体、沿所述盘体外侧圆周设置的紧固环、设置在所述盘体中心部位的支撑柱、设置在所述盘体内的隔挡片以及将所述隔挡片和所述支撑柱连接的旋转件,所述盘体上开设有用于贯通所述垃圾桶和所述行走机器人的开口部,所述隔挡片能够开启或封闭所述开口部。与相关技术相比,本发明提供的智能垃圾清扫机器其功能全面,容量大,使用便捷。使用便捷。使用便捷。
技术研发人员:刘永茂
受保护的技术使用者:刘永茂
技术研发日:2020.07.15
技术公布日:2022/1/17