1.本发明属于水下机器人技术领域,更具体地说,特别涉及一种微型水下机器人的机械式转向结构。
背景技术:
2.水下机器人也称无人遥控潜水器,能够代替人类在水下进行各项工作,其中,转向机构是水下机器人的重要组成部分,水下机器人通过转向机构能够在水底自由转向行驶。
3.如申请号为:cn201810016515.9的专利中,公开了一种机器人转向误差标定方法、装置及系统,首先设置矩形围栏;在机器人驶入围栏后,通过安装在机器人上的激光雷达扫描环境,监测围栏的4条边线,获取机器人相对围栏的初始姿态角;控制机器人原地转动一个角度;通过激光雷达获取机器人相对围栏的当前姿态角;根据初始姿态角、当前姿态角和转动角度,计算机器人的转向误差。本发明可以根据转向误差计算出机器人的左侧轮子和右侧轮子的相对位置误差,而标定轮子的相对位置误差,在机器人后续运动过程中可以针对该误差进行补偿,从而减少机器人做转弯运动时的角度误差。
4.现有轮式水下机器人大多只能通过一对轮组进行转向,即一对轮组能够活动转向,另一组轮组固定进行驱动,这种结构导致水下机器人转向时转向半径大,灵活性较差,不适合在狭小的通道或者环境下转向、掉头使用,适应性较差,实用性不高。
5.于是,有鉴于此,针对现有的结构及缺失予以研究改良,提供一种微型水下机器人的机械式转向结构,以期达到更具有更加实用价值性的目的。
技术实现要素:
6.为了解决上述技术问题,本发明提供一种微型水下机器人的机械式转向结构,以解决现有轮式水下机器人大多只能通过一对轮组进行转向,即一对轮组能够活动转向,另一组轮组固定进行驱动,这种结构导致水下机器人转向时转向半径大,灵活性较差,不适合在狭小的通道或者环境下转向、掉头使用,适应性较差,实用性不高的问题。
7.本发明微型水下机器人的机械式转向结构的目的与功效,由以下具体技术手段所达成:一种微型水下机器人的机械式转向结构,包括底盘模块;所述底盘模块包括有中部支撑梁、前转向板、后转向板和连接块,前转向板固定连接在中部支撑梁的梁体前端,且后转向板固定连接中部支撑梁的梁体后端,连接块在前转向板和后转向板顶部板体的中部均固定连接有一个,且连接块的顶部与水下机器人主体固定连接;所述前转向板和后转向板的内部两侧均安装有驱动轮模块。
8.进一步的,所述驱动轮模块包括有:支撑转向柱,支撑转向柱的柱体截面为“t”形,且支撑转向柱的顶部和底部均转动连接在前转向板的板体内部;
驱动电机,驱动电机固定在支撑转向柱的立柱内部;移动轮,移动轮转动连接在支撑转向柱的横柱内部,且移动轮安装在驱动电机的转轴外部。
9.进一步的,所述前转向板内部驱动轮模块的顶部安装有前轮转向模块,且后转向板内部驱动轮模块的顶部安装有后轮随动模块。
10.进一步的,所述前轮转向模块包括有:联动转向杆,联动转向杆的一端固定连接在前转向板内部支撑转向柱柱体的顶部;联动驱动杆,联动驱动杆的杆体两端分别转动连接在前转向板两端联动转向杆杆体的外端;转向控制块,转向控制块转动连接在中部支撑梁的内部,且转向控制块的块体底部固定连接有联动齿轮;转向电机,转向电机固定在中部支撑梁的梁体侧面,转向电机的转轴顶部固定连接有主动齿轮,且主动齿轮与联动齿轮的轮齿咬合传动连接。
11.进一步的,所述联动驱动杆的中部杆体顶部设有转向联动柱,且转向控制块的块体内部设有长条形的转向控制槽,转向联动柱插接在转向控制槽的内部。
12.进一步的,所述后轮随动模块包括有:定位套块,定位套块固定连接在后转向板内部支撑转向柱柱体的顶部;伸缩联动杆,伸缩联动杆插姐在定位套块的块体内部;调节电机,调节电机固定在定位套块的块体顶部;调节杆,调节杆的杆体一端固定连接在调节电机的转轴一端;随动驱动杆,随动驱动杆杆体两端分别转动连接在后转向板两端伸缩联动杆杆体的外端;随动转向块,随动转向块转动连接在中部支撑梁的梁体内部。
13.进一步的,所述随动转向块的块体底部固定连接有随动齿轮,且随动齿轮的轮齿与联动齿轮的轮齿咬合传动。
14.进一步的,所述随动驱动杆中部杆体的底部设有随动控制柱,且随动转向块的块体内部设有随动控制槽,随动控制槽的槽体长度大于转向控制槽的槽体长度,且随动控制槽槽体的一端位于随动齿轮的圆心位置。
15.进一步的,所述调节杆的杆体外部设有螺纹,且随动驱动杆的杆体端部设有调节螺纹孔,调节杆通过杆体螺纹拧接在调节螺纹孔的内部。
16.进一步的,所述伸缩联动杆的杆体截面形状为方形设计,且定位套块的块体内部设有定位槽,伸缩联动杆插接在定位槽的内部。
17.与现有技术相比,本发明具有如下有益效果:1、该装置在使用过程中,水下机器人通过底盘模块进行转向时,前转向板内部驱动轮模块能够在前轮转向模块的驱动下旋转移动轮进行转向,且后转向板内部驱动轮模块能够在后轮随动模块的同步作用下跟随前轮转向模块进行转向,且后轮随动模块跟随前轮转向模块的转向幅度可自由调节,使得该装置能够适应在不同环境下进行转弯、掉头的操作,方便灵活,自由度高,提高了该装置的实用性和灵活性。
18.2、前转向板内部驱动轮模块能够在前轮转向模块的驱动下旋转移动轮进行转向,当转向电机转动时,主动齿轮带动联动齿轮转动同时转向控制块同步转动,转向控制块的转向控制槽能够通过转向联动柱带动联动驱动杆左右摆动,从而通过联动转向杆带动前转向板内部的支撑转向柱转动,实现前轮转向的操作,且后转向板内部驱动轮模块能够在后轮随动模块的同步作用下跟随前轮转向模块进行转向,联动齿轮在转动时能够带动随动齿轮同步异向转动,使得随动转向块能够与转向控制块同步异向转动,从而带动随动驱动杆横向摆动,随动驱动杆通过伸缩联动杆带动后转向板内部支撑转向柱转动,实现后轮随动转向的操作,使得该装置使用的自由度更高更灵活,提高了该装置的灵活性和适应性。
19.3、后轮随动模块跟随前轮转向模块的转向幅度可自由调节,当调节电机转动时,能够同步带动调节杆转动,调节杆杆体螺纹通过调节螺纹孔带动随动驱动杆前后移动,从而改变随动控制槽通过随动控制柱驱动随动驱动杆的摆动幅度,从而实现调节后转向板内部驱动轮模块跟随前转向板内部驱动轮模块的转向幅度,自由灵活,使得该装置能够适应不同环境下的使用行驶,提高了该装置的灵活性和适应性。
附图说明
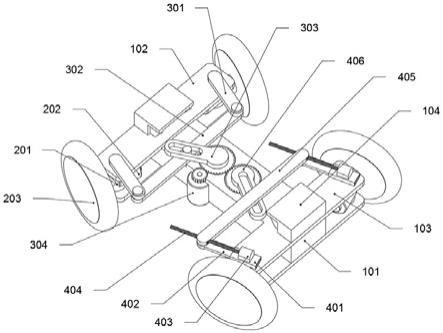
20.图1是本发明的结构示意图。
21.图2是本发明调节至后转向板内驱动轮模块不跟随前驱动板内驱动轮模块转向使用时的结构示意图。
22.图3是本发明调节至后转向板内驱动轮模块跟随前驱动板内驱动轮模块转向使用时的结构示意图。
23.图4是本发明底盘模块的结构示意图。
24.图5是本发明前轮转向模块的结构示意图。
25.图6是本发明后轮随动模块拆解后的结构示意图。
26.图7是本发明后轮随动模块底部的结构示意图。
27.图中,部件名称与附图编号的对应关系为:1、底盘模块;101、中部支撑梁;102、前转向板;103、后转向板;104、连接块;2、驱动轮模块;201、支撑转向柱;202、驱动电机;203、移动轮;3、前轮转向模块;301、联动转向杆;302、联动驱动杆;3021、转向联动柱;303、转向控制块;3031、联动齿轮;3032、转向控制槽;304、转向电机;4、后轮随动模块;401、定位套块;4011、定位槽;402、伸缩联动杆;403、调节电机;404、调节杆;405、随动驱动杆;4051、随动控制柱;4052、调节螺纹孔;406、随动转向块;4061、随动齿轮;4062、随动控制槽。
具体实施方式
28.下面结合附图和实施例对本发明的实施方式作进一步详细描述。以下实施例用于说明本发明,但不能用来限制本发明的范围。
29.在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上;术语“上”、“下”、“左”、“右”、“内”、“外”、“前端”、“后端”、“头部”、“尾部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对
本发明的限制。此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
30.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
31.实施例:如附图1至附图7所示:本发明提供一种微型水下机器人的机械式转向结构,包括底盘模块1;底盘模块1包括有中部支撑梁101、前转向板102、后转向板103和连接块104,前转向板102固定连接在中部支撑梁101的梁体前端,且后转向板103固定连接中部支撑梁101的梁体后端,连接块104在前转向板102和后转向板103顶部板体的中部均固定连接有一个,且连接块104的顶部与水下机器人主体固定连接;前转向板102和后转向板103的内部两侧均安装有驱动轮模块2,前转向板102内部驱动轮模块2的顶部安装有前轮转向模块3,且后转向板103内部驱动轮模块2的顶部安装有后轮随动模块4;驱动轮模块2包括有:支撑转向柱201,支撑转向柱201的柱体截面为“t”形,且支撑转向柱201的顶部和底部均转动连接在前转向板102的板体内部;驱动电机202,驱动电机202固定在支撑转向柱201的立柱内部;移动轮203,移动轮203转动连接在支撑转向柱201的横柱内部,且移动轮203安装在驱动电机202的转轴外部;前轮转向模块3包括有:联动转向杆301,联动转向杆301的一端固定连接在前转向板102内部支撑转向柱201柱体的顶部;联动驱动杆302,联动驱动杆302的杆体两端分别转动连接在前转向板102两端联动转向杆301杆体的外端;转向控制块303,转向控制块303转动连接在中部支撑梁101的内部,且转向控制块303的块体底部固定连接有联动齿轮3031;转向电机304,转向电机304固定在中部支撑梁101的梁体侧面,转向电机304的转轴顶部固定连接有主动齿轮,且主动齿轮与联动齿轮3031的轮齿咬合传动连接;后轮随动模块4包括有:定位套块401,定位套块401固定连接在后转向板103内部支撑转向柱201柱体的顶部;伸缩联动杆402,伸缩联动杆402插姐在定位套块401的块体内部,伸缩联动杆402的杆体截面形状为方形设计,且定位套块401的块体内部设有定位槽4011,伸缩联动杆402插接在定位槽4011的内部,在使用中,定位槽4011能够限制伸缩联动杆402的伸缩使用轨迹,从而使得伸缩联动杆402在使用调节时不会出现歪斜、扭曲导致装置失效的现象发生;调节电机403,调节电机403固定在定位套块401的块体顶部,且调节电机403、转向
电机304和驱动电机202均与水下机器人的控制模块电性连接,其具体结构与工作原理为现有成熟技术,在此不做累述;调节杆404,调节杆404的杆体一端固定连接在调节电机403的转轴一端;随动驱动杆405,随动驱动杆405杆体两端分别转动连接在后转向板103两端伸缩联动杆402杆体的外端;随动转向块406,随动转向块406转动连接在中部支撑梁101的梁体内部;在使用中,水下机器人通过底盘模块1进行转向时,前转向板102内部驱动轮模块2能够在前轮转向模块3的驱动下旋转移动轮203进行转向,且后转向板103内部驱动轮模块2能够在后轮随动模块4的同步作用下跟随前轮转向模块3进行转向,且后轮随动模块4跟随前轮转向模块3的转向幅度可自由调节,使得该装置能够适应在不同环境下进行转弯、掉头的操作,方便灵活,自由度高。
32.其中,联动驱动杆302的中部杆体顶部设有转向联动柱3021,且转向控制块303的块体内部设有长条形的转向控制槽3032,转向联动柱3021插接在转向控制槽3032的内部,在使用中,前转向板102内部驱动轮模块2能够在前轮转向模块3的驱动下旋转移动轮203进行转向,当转向电机304转动时,主动齿轮带动联动齿轮3031转动同时转向控制块303同步转动,转向控制块303的转向控制槽3032能够通过转向联动柱3021带动联动驱动杆302左右摆动,从而通过联动转向杆301带动前转向板102内部的支撑转向柱201转动,实现前轮转向的操作。
33.其中,随动转向块406的块体底部固定连接有随动齿轮4061,且随动齿轮4061的轮齿与联动齿轮3031的轮齿咬合传动,随动驱动杆405中部杆体的底部设有随动控制柱4051,且随动转向块406的块体内部设有随动控制槽4062,随动控制槽4062的槽体长度大于转向控制槽3032的槽体长度,且随动控制槽4062槽体的一端位于随动齿轮4061的圆心位置,在使用中,后转向板103内部驱动轮模块2能够在后轮随动模块4的同步作用下跟随前轮转向模块3进行转向,联动齿轮3031在转动时能够带动随动齿轮4061同步异向转动,使得随动转向块406能够与转向控制块303同步异向转动,从而带动随动驱动杆405横向摆动,随动驱动杆405通过伸缩联动杆402带动后转向板103内部支撑转向柱201转动,实现后轮随动转向的操作,使得该装置使用的自由度更高更灵活。
34.其中,调节杆404的杆体外部设有螺纹,且随动驱动杆405的杆体端部设有调节螺纹孔4052,调节杆404通过杆体螺纹拧接在调节螺纹孔4052的内部,在使用中,后轮随动模块4跟随前轮转向模块3的转向幅度可自由调节,当调节电机403转动时,能够同步带动调节杆404转动,调节杆404杆体螺纹通过调节螺纹孔4052带动随动驱动杆405前后移动,从而改变随动控制槽4062通过随动控制柱4051驱动随动驱动杆405的摆动幅度,从而实现调节后转向板103内部驱动轮模块2跟随前转向板102内部驱动轮模块2的转向幅度,自由灵活,使得该装置能够适应不同环境下的使用行驶。
35.本实施例的具体使用方式与作用:本发明中,将水下机器人安装在连接块104的顶部后即可将该装置放入水底使用,通过遥控装置可遥控水下机器人的工作状态以及该装置的移动状态,四个驱动轮模块2均由独立的驱动电机202控制,动力强,在水底的通过性高,当需要进行转向、掉头等操作时,前转向板102内部驱动轮模块2能够在前轮转向模块3的驱动下旋转移动轮203进行转向,当
转向电机304转动时,主动齿轮带动联动齿轮3031转动同时转向控制块303同步转动,转向控制块303的转向控制槽3032能够通过转向联动柱3021带动联动驱动杆302左右摆动,从而通过联动转向杆301带动前转向板102内部的支撑转向柱201转动,实现前轮转向的操作,且后转向板103内部驱动轮模块2能够在后轮随动模块4的同步作用下跟随前轮转向模块3进行转向,联动齿轮3031在转动时能够带动随动齿轮4061同步异向转动,使得随动转向块406能够与转向控制块303同步异向转动,从而带动随动驱动杆405横向摆动,随动驱动杆405通过伸缩联动杆402带动后转向板103内部支撑转向柱201转动,实现后轮随动转向的操作,后轮随动模块4跟随前轮转向模块3的转向幅度可自由调节,当调节电机403转动时,能够同步带动调节杆404转动,调节杆404杆体螺纹通过调节螺纹孔4052带动随动驱动杆405前后移动,从而改变随动控制槽4062通过随动控制柱4051驱动随动驱动杆405的摆动幅度,从而实现调节后转向板103内部驱动轮模块2跟随前转向板102内部驱动轮模块2的转向幅度,自由灵活,水下机器人通过底盘模块1进行转向时,前转向板102内部驱动轮模块2能够在前轮转向模块3的驱动下旋转移动轮203进行转向,且后转向板103内部驱动轮模块2能够在后轮随动模块4的同步作用下跟随前轮转向模块3进行转向,且后轮随动模块4跟随前轮转向模块3的转向幅度可自由调节,使得该装置能够适应在不同环境下进行转弯、掉头的操作,方便灵活,自由度高。
36.本发明的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本发明限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本发明的原理和实际应用,并且使本领域的普通技术人员能够理解本发明从而设计适于特定用途的带有各种修改的各种实施例。