1.本发明涉及水下机器人对水下基础物检测技术领域,特别涉及浮筏式潜航器水下定位导航系统挂载装置及挂载方法。
背景技术:
2.我国有大量的水库、江河桥梁等基础建设物,这些水库坝体、水下桥墩等基础物都需要定期检查和维修,以诊断这些重要的水下基础物的健康状态,确保水库和桥梁的安全。
3.传统的水下坝体和桥墩检查都是蛙人下水检测、拍照录像,在水库深水区和流水下桥墩水域有相当的危险性,且费用较高。随着水下机器人技术、小型高清摄像头和浑浊水域高清声纳成像技术的发展,水下机器人替代蛙人进行水下基础物检测已经开始应用并逐渐成为趋势。潜航器水下定位和导航技术不同于天际无线电波通讯,水下潜航器一般采用短基线声音传感器定位导航系统,通过阵列或者数个接收器接收水下潜航器挂载的定位器发射的信号,解算出水下位置坐标定位,协同深度传感器的水下深度数据,实现对潜航器的定位和导航。
4.现有的潜航器水下定位导航导航系统一般部署固定在船上,在跟随潜航器巡航时,无动力的小船漂流浮动产生的晃动、带动力小艇的震动都会对分米级的高精度的声波水下定位导航系统产生较大的干扰,严重影响潜航器水下巡航和勘探拍摄录像等工作任务。此外,船式挂载方式,需要有人在船上操作和维护,在非静态水域具有一定的危险性,用工费用也高。
技术实现要素:
5.本发明提供浮筏式潜航器水下定位导航系统挂载装置及挂载方法,解决船式水下定位导航系统挂载部署方式干扰大的问题,实现短基线定位导航分米级高精度定位和导航,具有导航精度高、布设简便、安全和成本低的特点。
6.本发明提供了浮筏式潜航器水下定位导航系统挂载装置及挂载方法,包括:浮筏;卷线器,设置在浮筏上;转接头,通过转接头底座固定在浮筏的底部;接收器支架,设置在浮筏的下方,上端与转接头可拆卸连接;蓄电池,设置在浮筏上,与卷线器电连接。
7.进一步地,所述转接头的底部设有两个上下相对的抱箍环,接收器支架的上端依次插入两个抱箍环内,通过抱箍环的螺母将接收器支架的上端固定。
8.进一步地,所述浮筏式潜航器水下定位导航系统包括:定位器,固定在潜航器上;处理器,设置在浮筏上,处理器上设有gps模块;多个接收器,固定在接收器支架上,通过线缆头连接处理器;
工作站,设置在潜航器附近的地面上,接收处理器发送的潜航器的位置信息以及gps模块的数据信息;定位器在水下持续发送潜航器的位置信号,多个接收器接收到的信号传送到处理器进行信号处理,处理器将处理后潜航器的位置信息连同gps模块的数据信息传送到工作站,实现工作站对潜航器的定位和导航控制。
9.进一步地,所述浮筏包括:救生圈;舱体,密封设置在救生圈围合的中部空间内,所述蓄电池设置在舱体内;安装板,固定在救生圈上,盖在舱体上,与舱体密封固定连接,处理器和卷线器固定在安装板上,所述安装板上还设有两个航空防水插头,一个连接接收器的线缆头,另一个连接蓄电池。
10.进一步地,所述救生圈采用ccs船用救生圈;救生圈的材质为高密度聚乙烯,壁厚110mm;所述救生圈内嵌舱体,所述舱体通过四个螺钉加防水密封垫圈固定在救生圈上;所述舱体采用2.0mm不锈钢材料;所述蓄电池通过箍带固定在舱体内的底座上;所述安装板为圆形,不锈钢材质,厚度2.0mm,带有加强筋;所述安装板用橡胶密封圈和六个螺钉固定在舱体上。
11.进一步地,所述接收器支架底部设有多个接收器分支架,多个接收器一一对应固定在多个接收器分支架上。
12.浮筏式潜航器水下定位导航系统的挂载方法,应用于上述的浮筏式潜航器水下定位导航系统挂载装置,包括以下步骤:岸边挂载,将所述的浮筏式潜航器水下定位导航系统挂载装置侧立触地;将接收器支架上连接接收器的线缆头接上浮筏底部的航空防水插头;将接收器支架上端穿入转接头的两个抱箍环内,用扳手将抱箍环的螺母拧紧,将接收器支架固定牢靠;将浮筏式潜航器水下定位导航系统挂载装置置入水中即可。
13.还包括以下步骤:浮筏式潜航器水下定位导航系统完成水下航行后返航回收后,浮筏式潜航器水下定位导航系统关机,浮筏式潜航器水下定位导航系统挂载装置用牵引绳回收上岸;将浮筏式潜航器水下定位导航系统挂载装置侧立触地;将接收器支架上连接接收器的线缆头从浮筏底板航空防水插头卸掉;用扳手拧松抱箍环的螺母,抽出接收器支架,各部件回收至保管箱,完成卸载。
14.与现有技术相比,本发明的有益效果在于:与现有技术相比,本发明较船式挂载,具有噪声干扰小、定位导航精度高、操作简便和安全的特点和优势。
15.结构上采用浮筏式,结构简约,制作工艺简单,工作可靠性高。可在3节流速以下,100深度水域内为潜航器提供高精度定位导航服务。
16.在使用方面,卷线器无人化自动化功能工作机制,大大提高了潜航器巡航和探测的工作效率。
17.在设备使用维护资源配置方面,浮筏式潜航器水下定位导航系统挂载装置采用模块化设计和人机工程设计,可维护性好,没有特殊要求,对使用维护人员简单培训既能胜任。
18.在经济效益方面,自动化设备替代人员在危险环境工作,大大降低人员用工成本,经济效益显著。
附图说明
19.图1为本发明提供的浮筏式潜航器水下定位导航系统挂载装置典型使用场景示意图。
20.图2为本发明提供的潜航器水下定位导航系统的构成框图。
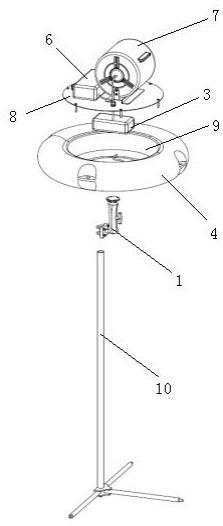
21.图3为本发明提供浮筏式潜航器水下定位导航系统挂载装置的结构示意图。
22.图4为本发明提供的接收器支架安装示意图。
23.图5为本发明提供的转接头的结构示意图。
24.图6为本发明提供的接收器支架安装后的结构示意图。
25.附图标记说明:1
‑
转接头,2
‑
防水航空插头,3
‑
蓄电池,4
‑
救生圈,5
‑
浮筏,6
‑
处理器,7
‑
卷线器,8
‑
安装板,9
‑
舱体,10
‑
接收器支架,11
‑
工作站,12
‑
定位器,13
‑
潜航器,14
‑
抱箍环。
具体实施方式
26.下面结合附图1
‑
6,对本发明的一个具体实施方式进行详细描述,但应当理解本发明的保护范围并不受具体实施方式的限制。
27.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明的技术方案和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
28.如图1
‑
6所示,本发明实施例提供的浮筏式潜航器水下定位导航系统挂载装置及挂载方法,包括:浮筏5,用于挂载潜航器水下定位导航系统的处理器;转接头1,通过转接头底座固定在浮筏5的底部;卷线器7,设置在浮筏5上,用于对潜航器水下定位导航系统的线缆进行收纳;接收器支架10,设置在浮筏5的下方,上端通过转接头1与浮筏5的底部固定连接,用于固定潜航器水下定位导航系统的接收器;蓄电池3,设置在浮筏5上,用于给卷线器7和接收器供电。
29.卷线器7用于对处理器与潜航器之间的线缆以及处理器与工作站之间的线缆进行收纳。
30.进一步地,所述转接头1的底部设有两个抱箍环,接收器支架10的上端插入抱箍环14内,通过螺母将接收器支架10的上端与抱箍环固定。
31.进一步地,如图1和图2所示,所述潜航器水下定位导航系统包括:定位器12,固定在潜航器13上,用于检测潜航器的位置信息;四个接收器,固定在接收器支架10上,与定位器连接,用于接收潜航器的位置信息;处理器6,设置在浮筏5上,用于接收并处理接收器发
送的潜航器的位置信息,处理器6上设有gps模块,用于获取浮筏5的位置信息;工作站11,即“地面站”,设置在潜航器附近的地面上,用于接收处理器6发送的潜航器位置信息以及浮筏5的位置信息,对潜航器进行定位和导航控制;定位器在水下持续发送潜航器位置信号,四个接收器接收到的信号传送到处理器6进行信号处理,处理器6将处理后潜航器位置信息连同gps模块的数据信息传送到工作站,实现工作站对潜航器的定位和导航控制。
32.进一步地,所述浮筏5包括:救生圈4;舱体9,密封设置在救生圈4围合的中部空间内,所述蓄电池3设置在舱体9内;安装板8,固定在救生圈4上,盖在舱体9上,与舱体9密封固定连接,处理器6和卷线器7固定在安装板8上,所述安装板8上还设有两个航空防水插头2,一个用于连接接收器线缆,使接收器接入处理器6,一个用于连接蓄电池3,为蓄电池3充电。
33.进一步地,所述救生圈4采用ccs船用救生圈;材质为高密度聚乙烯,壁厚110mm;救生圈4内嵌舱体9,所述舱体9通过四个螺钉加防水密封垫圈固定在救生圈4上;舱体9采用2.0mm不锈钢材料;所述蓄电池3通过箍带固定在舱体9内的底座上;安装板8为圆形,不锈钢材质,厚度2.0mm,带有加强筋;安装板8用橡胶密封圈和六个螺钉固定在舱体9上。
34.进一步地,所述接收器支架10上设有三个接收器分支架,用于一一对应与接收器固定。
35.浮筏式潜航器水下定位导航系统的挂载方法,包括以下步骤:岸边挂载,浮筏式潜航器水下定位导航系统挂载装置侧立触地;打开并固定接收器支架10;将接收器支架10上接收器的线缆头接上浮筏5底部的航空防水插头2;将接收器支架10上端穿入转接头1的两个抱箍环内,用扳手将螺母拧紧,将接收器支架10固定牢靠;将浮筏式潜航器水下定位导航系统挂载装置置入水中即可。
36.进一步地,还包括以下步骤:潜航器完成水下航行后返航回收后,潜航器水下定位导航系统关机,浮筏式潜航器水下定位导航系统挂载装置用牵引绳回收上岸,然后卸载;将浮筏式潜航器水下定位导航系统挂载装置侧立触地;将接收器支架10的线缆头从浮筏5底板航空防水插头2卸掉;用扳手拧松抱箍环的螺母,抽出接收器支架10,各部件回收至保管箱状态,完成卸载。
37.在说明浮筏式潜航器水下定位导航系统挂载装置之前,需要先对潜航器水下导航系统构成进行说明。
38.如图2所示,潜航器水下定位导航系统由一个定位器,四个接收器,一台处理器和工作站组成;其中定位器装在潜航器上,四个接收器装在接收器支架上,接收器支架挂载在浮筏式潜航器水下定位导航系统挂载装置底部水中,处理器固定在浮筏式潜航器水下定位导航系统挂载装置的上部。其工作原理是,定位器在水下持续发送潜航器位置信号,四个接收器接收到的信号传送到处理器进行信号处理,处理器将解算的潜航器位置信息连同处理器gps数据信息传送到地面站,实现地面站对潜航器的定位和导航控制。
39.浮筏式潜航器水下定位导航系统挂载装置,包括浮筏、卷线器、卷线器供电蓄电池、接收器支架等。如图1所示,浮筏式潜航器水下定位导航系统挂载装置其使用方式和功能是,通过接收器支架挂载水下定位系统的接收器,通过线缆与潜航器上的“定位器”连接、
通过线缆与岸边的便携“地面站”连接,完成水下定位导航系统的连接,为潜航器水下巡航和机动提供导航服务。
40.浮筏采用ccs中国船级社船用救生圈作为浮体;材质为高密度聚乙烯,壁厚110mm。救生圈内嵌舱体,并用四个螺钉加防水密封垫圈将舱体固定在救生圈上;舱体采用2.0mm不锈钢材料。浮筏底部外侧中央位置固定转接头底座。浮筏底部还有一个防水航空插头,将接收器支架的四个接收器线缆接入浮筏并穿过安装板接入处理器。舱体内部置放给卷线器供电的蓄电池,通过底座和箍带进行固定。舱体上部是圆形安装板,不锈钢材质,厚度2.0mm,带有加强筋;安装板盖在舱体上,用橡胶密封圈和六个螺钉固定。安装板上面固定有处理器和卷线器,安装板装有两个航空防水插头,一个是接收器线缆接入处理器,一个是蓄电池充电及电源开关控制。
41.浮筏式潜航器水下定位导航系统挂载装置浮力承重计算说明:表1为浮筏式潜航器水下定位导航系统挂载装置各部件重量及尺寸表。
42.表1(各部件数量均为一个)浮筏表面积 = 2*πr2+2πr*l = 2*3.14*0.42+2*3.14*0.4*0.14 =1.88m2浮筏体积 =πr2*l = 3.14*0.42*0.14 =0.0703m3浮筏5浮力可承重70kg,浮筏式潜航器水下定位导航系统挂载装置全重为19.16kg,承重有较大余量。重心位置在浮筏舱体中上部,浮筏5在水中稳定。
43.浮筏式潜航器水下定位导航系统挂载装置挂载方法,包括以下步骤:步骤1, 岸边挂载,浮筏式潜航器水下定位导航系统挂载装置侧立触地;接收器支架由收缩状态打开并固定好三个接收器分支架;步骤2,先将接收器支架的线缆头接上浮筏底部的航空防水插头;步骤3,将接收器支架上端穿入转接头两个抱箍环内,用小扳手将四个螺母拧紧,将接收器支架10固定牢靠。此时可以将浮筏式潜航器水下定位导航系统挂载装置置入水
中,然后就可以开始工作。
44.卸载方法:潜航器完成水下航行后返航回收后,水下定位导航系统关机,浮筏式潜航器水下定位导航系统挂载装置用牵引绳回收上岸,然后可以卸载。
45.步骤4,将浮筏式潜航器水下定位导航系统挂载装置侧立触地;步骤5,将接收器支架的线缆头从浮筏底板航空防水插头2卸掉;步骤6,用小扳手拧松抱箍环的固定螺母,抽出接收器支架,各部件回收至保管箱状态,完成卸载。
46.与现有技术相比,本发明较船式挂载,具有噪声干扰小、定位导航精度高、操作简便和安全的特点和优势。
47.结构上采用浮筏式,结构简约,制作工艺简单,工作可靠性高。可在3节流速以下,100深度水域内为潜航器提供高精度定位导航服务。
48.在使用方面,卷线器无人化自动化功能工作机制,大大提高了潜航器巡航和探测的工作效率。
49.在设备使用维护资源配置方面,浮筏式潜航器水下定位导航系统挂载装置采用模块化设计和人机工程设计,可维护性好,没有特殊要求,对使用维护人员简单培训既能胜任。
50.在经济效益方面,自动化设备替代人员在危险环境工作,大大降低人员用工成本,经济效益显著。
51.以上公开的仅为本发明的几个具体实施例,但是,本发明实施例并非局限于此,任何本领域的技术人员能思之的变化都应落入本发明的保护范围。