1.本发明涉及水下机器人领域,尤其涉及一种抗水冲击力强,灵活性高,用于水下线缆巡检的自主巡线机器人。
背景技术:
2.人类当今正面临着人口、资源和环境三大难题。随着各国经济的飞速发展和世界人口的不断增加,人类消耗的自然资源越来越多,陆地上的资源正在日益减少。为了生存和发展,海洋开发势在必行。从长远看以海洋为背景来发展机器人科学技术,是一项具有开拓性的工作。水下机器人在海洋开发中占据重要地位,其可在高度危险环境、被污染环境以及零可见度的水域代替人工在水下长时间作业,水下机器人在石油开发、海事执法取证、科学研究和军事等领域得到广泛应用。因此,越来越多的水下机器人被研发出来,一般会配备声呐系统、摄像机、照明灯和机械臂等装置,能提供实时视频、声呐图像,机械臂能抓起重物。水下机器人可分为有缆遥控潜水器和无缆遥控潜水器两种,其中有缆遥控潜水器又分为水中自航式、拖航式和能在海底结构物上爬行式三种。而水下机器人的外形也有很多种,但大多数水下机器人为了减少阻力或方便搭载设备,将外形设计为长方形或流线形,因此,大部分的水下机器人存在以下两个不足:1.姿态不稳定;2.灵活性差。
3.但在水下机器人的应用领域中,水下安全搜救、水下管道线缆的巡检、船舶检修、海洋石油工程、水下环境观测、水能产业检修、水下考古和渔业养殖等,对水下机器人提出了更高的要求,需要水下机器人在被水的冲击作用后能够迅速调整自身的姿态,拥有更强的抗水冲击力和更高的灵活性。
4.此外,国内大多数的水下机器人还是采用有缆通信,需要水下机器人携带很长的缆,这会导致整体设备的笨重和影响水下机器人在水中作业,降低水下机器人的姿态稳定和灵活性。
技术实现要素:
5.针对现有技术的不足,本发明提供了一种垂直式主体、具有不倒翁特性的水下巡线机器人,在水的冲击作用后能够迅速自身调节恢复至正常的作业姿态,具有超强的抗水冲击力和更高的灵活性,解决了现有的大部分水下机器人姿态调整效率低,不具高灵活性的问题。
6.为了解决上述技术问题,本发明是通过以下技术方案实现:
7.本发明公开一种水下巡线机器人,包括上盖板、下盖板、电子舱上盖、电子舱下盖、推进器固定环、推进器、电池舱、主控板支架和电池支架;
8.上盖板通过上盖板固定环固定在电子舱上盖上,所述电子舱下盖固定在电子舱上盖的底部,主控板支架设置在电子舱下盖的顶部,所述推进器固定环固定在电子舱下盖的底部的中心,推进器固定环内套有电池舱;所述的推进器固定环外表面周向均布四个用于固定推进器的凸台,每个凸台上设有一个推进器,每对称的两个凸台为同一方向排列,相对
的两个对称推进器水平朝上布置,其余两个水平布置;所述电池舱的顶部与电子舱下盖的底部通过第一法兰环连接,电池舱的底部与第二法兰环连接,电池舱内套电池支架,所述电池支架与电子舱下盖连接,并放置于电池舱内部,所述下盖板通过下盖板固定环与第二法兰环连接;所述螺杆贯穿下盖板固定环和下盖板并延至推进器固定环,使用螺栓与推进器固定环连接;所述的上盖板、下盖板、电子舱上盖、电子舱下盖组成的电子舱体积大于电池舱体积,电池舱质量大于电子舱质量。
9.作为优选,所述电子舱上盖为数字“8”的形状,中间凹陷的设计为了不阻挡垂直推进器的排水,其顶部开设一道密封槽,通过上盖板固定环与上盖板密封连接,并且电子舱上盖的底部边缘均匀分设多个通孔,通过螺栓与电子舱下盖紧密连接,所述电子舱上盖的顶部设有多个不同内径的通孔,用于放置水密接插件和传感器。
10.作为优选,所说电子舱下盖的顶部开设两道与其边缘形状一样的密封槽,并且电子舱下盖的底部边缘分布多个通孔,通过螺栓与电子舱上盖形成密封连接,电子舱下盖的底部凸起的法兰环用于连接电池舱,并且电子舱下盖的底部有四个小凸台,每个小凸台有两个螺纹孔,用于固定推进器固定环,所述电子舱下盖的底部设有多个不同内径的通孔,用于放置水密接插件和传感器。
11.作为优选,所述主控板支架有两层结构,第一层的表面有四个螺纹孔和两道散热口,分别用于主控板的固定和通风散热,第二层有四个装有螺纹的凸台,用于固定树莓派,并且第二层的两侧各有一块长条,用于固定摄像头。
12.作为优选,所述推进器固定环的顶部开设两个对称的凹槽,并且表面有四个用于固定推进器的凸台。
13.作为优选,所述电池支架的顶部四角分别开设一个螺纹孔,用于连接电子舱下盖,电池支架的底部设有一块正方形的平面,在其四角各开设一个螺纹孔,用于固定摄像模块,并且电池支架的四个侧面各开设两道散热孔,用于电池的散热。
14.作为优选,所述下盖板固定环边缘形状与下盖板一致,在其圆心位置切除一个圆,用于摄像头捕捉水下画面。
15.作为优选,所述法兰环的顶部开设一道密封槽,底部外圆面开设两道密封槽,并且底部表面均匀分设四个螺纹孔,用于连接电池支架。
16.作为优选,所述下盖板对称两侧向外凸起,表面均匀分设两个螺纹通孔,并且在下盖板边缘均匀开设六个螺纹通孔,下盖板的顶部连接至法兰环,其底部连接至下盖板固定环。
17.有益效果
18.本发明提供了一种水下巡线机器人。与现有技术相比具有以下有益效果:
19.本发明的水下巡线机器人的整体结构为垂直式主体,同时将其重心位置设计在中下部,使得在机械结构上具有不倒翁特性。因此在水流的冲击作用后,能够迅速回归至正常的作业姿态。并且本发明的水下巡线机器人通过两个垂直向上的推进器控制机器人的上浮下潜,同时其整体结构为垂直式主体,大大减小了上浮和下潜的阻力;通过两个水平向前的推进器控制机器人的前进后退,即使整体结构为垂直式主体,但由于具有不倒翁特性,在前进和后退的过程中整体会有倾斜,从而减小了水平方向的阻力,综上实现了水下巡线机器人的基本运动功能,并且通过调节推进器的转速可以达到悬停和全周转向的功能,提高了
整体的灵活性,比其他水下机器人更容易实现水下作业和数据采集。
20.本发明的水下巡线机器人在其上盖板和下盖板的下方都安装了高清摄像模块,能够采集水下和水面的信息,将采集到的信息传输给电子舱内的树莓派开发板,树莓派开发板通过图像识别算法定位识别水下线缆的位置,随后将处理后的线缆位置信息传输给主控板,主控板利用接收到的线缆位置信息控制四个推进器的运转。即该水下巡线机器人便可以在水下进行线缆的巡检工作。
21.该水下巡线机器人操作简单,抗干扰性强,可广泛用于水下线缆的巡检工作。
附图说明
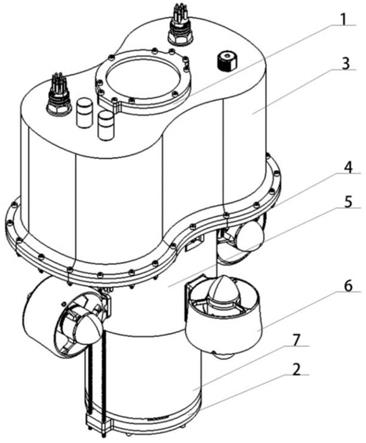
22.图1是本发明的整体结构示意图;
23.图2
‑
1是本发明的整体结构主视图;
24.图2
‑
2是本发明的整体结构侧视图;
25.图2
‑
3是本发明的整体结构仰视图;
26.图3是本发明的整体结构剖视图;
27.图4是本发明电子舱局部剖视图;
28.图5是本发明电池舱7局部剖视图;
29.图6是本发明下盖板2的立体图。
具体实施方式
30.在此之前需要说明以下几点:由于本发明包含了机械结构部分、电子控制部分及无线通讯和图像识别部分,结构十分复杂,且本说明书着重描述该水下巡线机器人的机械结构部分及其创新,因此除机械结构部分,其他部分不再详细介绍。
31.下面结合附图与具体实施方式对本发明作进一步详细描述:
32.如图1、图2
‑
1、图2
‑
2、图2
‑
3、图3所示,本发明提供一种技术方案:一种水下巡线机器人,主体部分由:上盖板1、下盖板2、电子舱上盖3、电子舱下盖4、、推进器固定环5、推进器6、电池舱7、主控板支架8、电池支架9、上盖板固定环10、下盖板固定环11、螺杆12、法兰环13组成。
33.其中:
34.电子舱上盖3为数字“8”的形状,中间凹陷设计,其顶部开设一道密封槽,并且电子舱上盖3的底部边缘均匀分设二十四个通孔,顶部中央位置分设五个不同内径的通孔;
35.如图6所示,电子舱下盖4为数字“8”的形状,中间凹陷设计,其顶部开设两道与其边缘形状一样的密封槽,并且电子舱下盖4的底部边缘分布二十四个通孔,底部有四个小凸台,每个小凸台开设两个螺纹孔;
36.如图5所示,推进器固定环5的顶部开设两个对称的凹槽,整体表面有四个用于固定推进器6的凸台,每对称的两个凸台为同一方向排列,相对的两个对称推进器6水平朝上布置,其余两个水平布置,每个凸台开设四个按长方形排列的螺纹通孔;
37.如图4所示,主控板支架8有两层结构,第一层的表面有四个螺纹孔和两道散热口,第二层有四个装有螺纹的凸台,并且第二层的两侧各有一块长条,并且主控板支架8的底部有四个小凸台;
38.电池支架9的顶部四角分别开设一个螺纹孔,其底部设有一块正方形的平面,在其四角各开设一个螺纹孔,并且电池支架9的四个侧面各开设两道散热孔;
39.法兰环13的顶部开设一道密封槽,底部外圆面开设两道密封槽,并且底部表面均匀分设四个螺纹孔;
40.下盖板2对称两侧向外凸起,表面均匀分设两个螺纹通孔,并且在下盖板2边缘均匀开设六个螺纹通孔;
41.下面描述各部件的连接关系:
42.电子舱上盖3的顶部使用螺栓贯穿上盖板固定环10和上盖板1,使得上盖板固定环10将上盖板1与电子舱上盖3的顶部夹紧,并形成密封连接,并且电子舱上盖3的顶部设有五个不同内径的通孔,用于连接水密接插件和其他传感器,电子舱上盖3的底部边缘均匀分设二十四个通孔,通过螺栓与电子舱下盖4顶部紧密连接;
43.电子舱下盖4的顶部开设两道与其边缘形状一样的密封槽,用来放置密封圈,电子舱下盖4的底部边缘分布二十四个通孔,通过螺栓与电子舱上盖3形成密封连接,电子舱下盖4的底部凸起的法兰环用于连接电池舱,并且电子舱下盖4的底部有四个小凸台,每个小凸台有两个螺纹孔,用于固定推进器固定环5;
44.主控板支架8有两层结构,第一层的表面有四个螺纹孔和两道散热口,将主控板的四个定位孔放置于螺纹孔位置,用螺栓将其固定,第二层有四个装有螺纹的凸台,用于固定树莓派,并且第二层的两侧各有一块长条,每个长条的表面均匀分设两个螺纹孔,用于固定摄像头。同时主控板支架8的底部有四个小凸台,使用螺栓将主控板支架8固定于电子舱下盖4的顶部;
45.推进器固定环5的顶部开设两个对称的凹槽,分别对应电子舱下盖4的正前、后方的螺母,便于其固定,并且推进器固定环5表面的四个凸台连接推进器6,相对的两个对称推进器6水平朝上布置,其余两个水平布置;
46.电池舱7的顶部穿过推进器固定环5内部,连接至电子舱下盖4的法兰环,电池舱7的底部连接法兰环13,电池舱7内套电池支架9;
47.法兰环13的顶部开设一道密封槽,用来放置密封圈,并且其顶部使用螺栓贯穿下盖板固定环11和下盖板2,使得下盖板固定环11将下盖板2与法兰环13的顶部夹紧,并形成密封连接,法兰环13的底部表面开设两道密封槽,用来放置密封圈,连接至电池舱7的底部;
48.螺杆12贯穿下盖板固定环11和下盖板2,并连接至推进器固定环5,并用螺母在下盖板固定环11的位置上将其拧紧,使得下盖板固定环11、下盖板2、法兰环13、电池舱7和电子舱下盖4之间形成紧密连接。
49.工作过程:
50.按照上述的连接原理,将各个零部件从上到下依次连接装配,装配完毕并调试好后将水下巡线机器人放入水中,将写好的代码烧录至主控板芯片上,并且水面控制台可以实时观察到从水下传输来的画面,水下巡线机器人借助搭载的树莓派开发板,使用图像识别算法自主识别水下线缆并定位线缆位置,将有效的信息处理发送至主控板,主控板接收位置信息后控制四个推进器6的运转,不断地对水下线缆进行巡检。当水下巡线机器人遇到了水流的冲击后,由于自身的不倒翁特性使其迅速回归至正常作业姿态;当水下巡线机器人需要前进后退,则水平朝向的推进器6正反转即可,当需要上浮下潜,则水平向上的推进
器6正反转即可,当需要在水中悬停,则水平向上的推进器6以一定的转速抵消水下巡线机器人在水中质量即可。本发明的水下巡线机器人操作简单,抗水冲击干扰强,灵活性高,可广泛用于水下线缆的巡检工作。
51.以上结合附图对本发明的实施方式作了详细说明,但是本发明不限于上述实施方案,在所述技术领域普通技术人员所具备的知识范围内,还可以不脱离本发明的原理和精神的前提下做出对这些实例进行各种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。此外,本发明涉及的未说明部分与现有技术相同,或采用现有技术实现。