一种用于水下开孔的小型rov
技术领域
1.本发明涉及水下作业装置技术领域,特别是涉及一种用于水下开孔的小型rov。
背景技术:
2.rov,即遥控无人潜水器(remote operated vehicle)。rov的功能多种多样,不同类型的rov用于执行不同的任务,被广泛应用于军队、海岸警卫、海事、海关、核电、水电、海洋石油、渔业、海上救助、管线探测和海洋科学研究等各个领域。
3.近年来,我国对海洋领域的发展越来越重视,我国的海上贸易也在逐年增加。但是,随着海上航行的设备越来越多,船舶间碰撞事故也不断增加,沉船事故也不断增加,这就需要对沉船体油漆进行取样。考虑到水下刮产油漆的不可操作性,一般可采用水下钻切获得沉船船体钢板的方法,以获得沉船本船油漆和破口附近可能外来油漆附着油漆,再通过理论分析技术与肇事嫌疑船舶的本船油漆或疑似外来油漆进行对比。目前,水下勘验工作往往是由潜水员完成,但是水下情况较为复杂、实施难度较大、成本高,导致潜水员的工作环境容易发生危险,所以研发一台水下开孔用小型rov具有重要的现实意义。
4.专利号cn 104354843提供了配合rov的海洋油船微型打捞钻孔装置及方法,提出了一种海洋油船微型打捞钻孔装置及方法,但是该种钻孔需要配合独立的rov进行水下作业(两台装置,协同进行水下作业),这使得该水下钻孔装置系统操作非常复杂。同时由于rov搭载了该装置使得rov的机动性能受到了较大影响,只能在水下完成一些简单的动作,这将使得该水下钻孔装置只能进行一些简单的钻孔工作,很难完成一些水下大弧度大倾角的船体钻孔工作。该水下钻孔装置在原理上采用了液压驱动的钻孔方式,一方面需要本体rov为之提供液压动力,同时也增加了水下泄露的风险。
技术实现要素:
5.鉴于以上所述现有技术的缺点,本发明的目的在于提供一种用于水下开孔的小型rov,用于解决现有技术中水下钻孔的rov体积较大、操作不灵活的问题。本发明中一种用于水下开孔的小型rov,可通过脐带缆与水面母船进行通讯,并由水面母船控制水下rov执行响应动作。该小型rov搭载了水下小型钻机,可进行水下钻孔和取样,同时该小型rov还具有机动性好、操作灵活及较大的抗流能力等优点。
6.为实现上述目的及其他相关目的,本发明提供一种用于水下开孔的小型rov,所述小型rov包括rov机构和水下钻孔机构;
7.所述rov机构包括主框架,所述主框架上安装有上浮力板和下浮力板,所述主框架中安装有上浮力板的一侧安装有起吊头,所述主框架中安装有下浮力板的一侧安装有水下钻孔机构、水下磁性吸附装置、照明装置和摄像装置;所述水下磁性吸附装置包括若干个水下电磁铁;
8.所述主框架中安装有若干个垂直推进器,所述垂直推进器与所述主框架的垂直轴线的夹角为5~20
°
;
9.所述主框架中安装有若干个水平推进器,所述水平推进器与所述主框架的水平轴线的夹角为45
°
;
10.所述主框架的侧面安装电动云台,所述电动云台上安装有所述照明装置和摄像装置;
11.所述主框架中设置有主控舱,所述主控舱均与所述水平推进器、垂直推进器、电动云台、照明装置和摄像装置电连接。
12.上述小型rov集成了遥控无人潜水、水下钻孔于一体,同时在设计中采用多个垂直推进器和水平推进器,且垂直推进器与主框架的垂直轴线有一定的夹角、水平推进器与主框架的水平轴线的夹角为45
°
,使该小型rov具有较好的水下姿态调整灵活性,可实现垂直前进及任意角度钻孔,极大的提高了上述小型rov在水下沉船钻孔的使用范围;此外,通过在主框架上安装上浮力板和下浮力板,使得小型rov具有较小的重浮心设计,极大的增加了该rov的机动性能,使该小型rov具有较好的水下姿态调整灵活性。上述水下钻孔机构安装在rov主结构上,水下钻孔机构可以实现水下钻孔的功能,并且水下钻孔机构的结构和控制系统简单,从而提高上述小型rov的作业可靠性。照明装置和摄像装置方便水下观察。水下磁性吸附装置主要用于吸紧水下钢板,水下钻孔机构进行水下作业。
13.上述小型rov的起吊头可通过脐带缆与水面母船进行通讯,并由水面母船控制小型rov执行响应动作。该小型rov上搭载了水下小型钻机(水下钻孔机构),可进行水下钻孔和取样,同时该小型rov还具有机动性好、操作灵活及较大的抗流能力等优点。上述小型rov的最大作业水深可达1000米,可在4级海况及4节流速下作业,最大钻孔钢板厚度30mm,还具有良好的机动性、灵活性。
14.上浮力板和下浮力板均采用浮力材料进行制作,使得该小型rov的具有较小的重浮心偏距,这样可使该小型rov具有较好的水下姿态调整灵活性,可实现垂直前进及钻孔。
15.于本发明的一实施例中,所述水下钻孔机构包括rov安装座,所述rov安装座与所述主框架连接;所述rov安装座与钻孔机安装座连接;所述钻孔机安装座上安装有滑轨,所述滑轨与切割电机通过滑块连接,所述滑块与进给电机通过丝杆连接;所述切割电机与钻刀传动连接,所述切割电机上安装有位移传感器;所述切割电机、进给电机和位移传感器均与所述主控舱电连接。
16.进给电机带动丝杆和滑块顺着滑轨进行上下运动、切割电机驱动钻刀实现旋转功能(正反向旋转功能),使得结构和控制系统更加简单,也增加了水下钻孔机构的可靠性。位移传感器主要用于测量钻刀的切割行程,且位移传感器采用充油压力补偿结构形式。钻孔机安装座主要通过螺栓通过滑块,滑块上安装有切割电机,从而使得切割电机安装在钻孔机安装座上。钻孔机安装座与rov安装座也是通过螺栓连接。水下钻孔机构通过rov安装座安装在该小型rov底部的中心位置,水下切割时通过照明装置和摄像装置进行观察并调整位置。
17.于本发明的一实施例中,所述钻刀为强磁化钻刀,所述强磁化钻刀的钻孔直径为20~60mm。强磁化钻刀具有较强磁性,从而可吸附待钻穿的钢板。
18.于本发明的一实施例中,所述钻刀的内部安装有强力磁铁,所述钻刀的钻孔直径为20~60mm。强力磁铁安装在钻刀的内部,强力磁铁可以吸附待钻穿的钢板,“钻刀+强化磁铁”的作用与前述的强磁化钻刀的作用相似。
19.于本发明的一实施例中,所述切割电机和进给电机均为直流无刷电机,所述直流无刷电机中安装有水下减速器,所述水下减速器为行星减速机或涡轮蜗杆减速机。上述水下钻孔机构采用“直流无刷电机(进给电机、切割电机)+水下减速器”结构,进给电机带动丝杆和滑块顺着滑轨进行上下运动、切割电机驱动钻刀实现旋转功能(正反向旋转功能),使得结构和控制系统更加简单,也增加了水下钻孔机构的可靠性。上述水下减速器都采用了充油压力补偿结构形式。
20.于本发明的一实施例中,所述垂直推进器和水平推进器中均包括水下充油电机,所述水下充油电机与所述主控舱电连接;所述水下充油电机为永磁电机、直流无刷电机或感应电机。
21.垂直推进器和水平推进器中均包括水下充油电机,水下充油电机驱动垂直推进器和水平推进器运动,可实现垂直前进及任意角度钻孔,极大的提高了上述小型rov在水下沉船钻孔的使用范围。
22.于本发明的一实施例中,所述rov机构还包括防护装置,所述防护装置安装在所述主框架的外侧。防护装置安装在主框架的侧面底部及垂直推进器的四周,对整个rov机构起到防护作用。
23.于本发明的一实施例中,所述垂直推进器和水平推进器的数量均为四个,所述垂直推进器与所述主框架的垂直轴线的夹角为15
°
。
24.在设计中采用八个推进器(四个水平推进器、四个垂直推进器),且采用了较小的重浮心设计,极大的增加了该rov的机动性能,这样可使该rov具有较好的水下姿态调整,可实现垂直前进及任意角度钻孔。垂直推进器安装在主框架顶部的四个角落,并且相邻的两个垂直推进器是对称分布在主框架中的。
25.于本发明的一实施例中,所述水下磁性吸附装置包括三个呈三角形分布的水下电磁铁,该三角形的几何中心处安装水下钻孔机构。每个水下电磁铁都采用了充油压力补偿结构形式,每个水下电磁铁都具有轴向止转功能。
26.于本发明的一实施例中,所述水下磁性吸附装置包括四个呈矩形分布的水下电磁铁,该矩形的几何中心处安装水下钻孔机构。每个水下电磁铁都采用了充油压力补偿结构形式,每个水下电磁铁都具有轴向止转功能。
27.如上所述,本发明的一种用于水下开孔的小型rov,具有以下有益效果:
28.1、上述小型rov集成了遥控无人潜水、水下钻孔于一体,同时在设计中采用多个垂直推进器和水平推进器,且垂直推进器与主框架的垂直轴线有一定的夹角、水平推进器与主框架的水平轴线的夹角为45
°
,使该小型rov具有较好的水下姿态调整灵活性,可实现垂直前进及任意角度钻孔,极大的提高了上述小型rov在水下沉船钻孔的使用范围;此外,通过在主框架上安装上浮力板和下浮力板,使得小型rov具有较小的重浮心设计,极大的增加了该rov的机动性能,使该小型rov具有较好的水下姿态调整灵活性。上述水下钻孔机构安装在rov主结构上,水下钻孔机构可以实现水下钻孔的功能,并且水下钻孔机构的结构和控制系统简单,从而提高上述小型rov的作业可靠性。照明装置和摄像装置方便水下观察。水下磁性吸附装置主要用于吸紧水下钢板,水下钻孔机构进行水下作业。
29.2、上述小型rov的起吊头可通过脐带缆与水面母船进行通讯,并由水面母船控制小型rov执行响应动作。该小型rov上搭载了水下小型钻机(水下钻孔机构),可进行水下钻
孔和取样,同时该小型rov还具有机动性好、操作灵活及较大的抗流能力等优点。上述小型rov的最大作业水深可达1000米,可在4级海况及4节流速下作业,最大钻孔钢板厚度30mm,还具有良好的机动性、灵活性。
附图说明
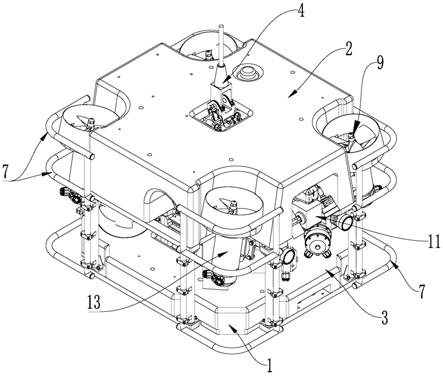
30.图1显示为本发明实施例中一种用于水下开孔的小型rov的立体示意图。
31.图2显示为本发明实施例中一种用于水下开孔的小型rov的侧视图。
32.图3显示为本发明实施例1中一种用于水下开孔的小型rov的仰视图。
33.图4显示为本发明实施例中一种用于水下开孔的小型rov中水下钻孔机构的立体示意图。
34.图5显示为本发明实施例2中一种用于水下开孔的小型rov中钻刀内部示意图。
35.元件标号说明
36.1-主框架;2-上浮力板;3-下浮力板;4-起吊头;5-照明装置;6-摄像装置;7-防护装置;8-水下电磁铁;9-垂直推进器;10-水平推进器;11-电动云台;12-主控舱;13-水下充油电机;14-水下钻孔机构,1401-rov安装座,1402-钻孔机安装座,1403-滑轨,1404-切割电机,1405-滑块,1406-进给电机,1407-丝杆,1408-钻刀,1409-位移传感器,1410-水下减速器;15-强力磁铁。
具体实施方式
37.以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效。
38.请参阅图1至图5。须知,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得能涵盖的范围内。同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
39.实施例1
40.请参阅图1至图4,本发明提供一种用于水下开孔的小型rov,所述小型rov包括rov机构和水下钻孔机构14;
41.所述rov机构包括主框架1,所述主框架1上安装有上浮力板2和下浮力板3,所述主框架1中安装有上浮力板2的一侧安装有起吊头4,所述主框架1中安装有下浮力板3的一侧安装有水下钻孔机构14、水下磁性吸附装置、照明装置5和摄像装置6,防护装置7安装在所述主框架1的外侧;所述主框架1中安装有四个垂直推进器9,所述垂直推进器9与所述主框架1的垂直轴线的夹角为10
°
;所述主框架1中安装有四个水平推进器10,所述水平推进器10与所述主框架1的水平轴线的夹角为45
°
;所述主框架1的侧面安装电动云台11,所述电动云台11上安装有所述照明装置5和摄像装置6;所述主框架1中设置有主控舱12,所述主控舱12均与所述电动云台11、照明装置5和摄像装置6电连接;所述垂直推进器9和水平推进器10中
均包括水下充油电机13,所述水下充油电机13与所述主控舱12电连接;所述水下充油电机13为永磁电机;所述水下磁性吸附装置包括三个呈三角形分布的水下电磁铁8,该三角形的几何中心处安装水下钻孔机构14;
42.所述水下钻孔机构14包括rov安装座1401,所述rov安装座1401与所述主框架1连接;所述rov安装座1401与钻孔机安装座1402连接;所述钻孔机安装座1402上安装有滑轨1403,所述滑轨1403与切割电机1404通过滑块1405连接,所述滑块1405与进给电机1406通过丝杆1407连接;所述切割电机1404与钻刀1408传动连接,所述切割电机1404上安装有位移传感器1409;所述切割电机1404、进给电机1406和位移传感器1409均与所述主控舱12电连接;所述钻刀1408为强磁化钻刀,所述强磁化钻刀的钻孔直径为20~60mm;所述切割电机1404和进给电机1406均为直流无刷电机,所述直流无刷电机中安装有水下减速器1410,所述水下减速器1410为行星减速机。
43.小型rov的工作过程:上述小型rov的起吊头4可通过脐带缆与水面母船进行通讯,从而将水面母船的信号传输至主控舱12,并由水面母船控制小型rov执行响应动作。工作过程具体包括运动过程和钻孔过程。
44.运动过程:主控舱12控制垂直推进器9和水平推进器10的工作状态,垂直推进器9由其内部的水下充油电机13提供动力,从而驱动小型rov上下移动。水平推进器10由其内部的水下充油电机13提供动力,从而驱动小型rov灵活转向。在小型rov运动的过程中,通过照明装置5和摄像装置6进行观察并调整位置。
45.钻孔过程:水下磁性吸附装置吸紧水下钢板,主控舱12控制切割电机1404和进给电机1406的工作状态,进给电机1406带动丝杆1407和滑块1405顺着滑轨1403进行上下运动,切割电机1404驱动钻刀1408实现旋转钻孔。在钻孔的过程中,通过照明装置5和摄像装置6进行观察并调整小型rov的角度和位置。
46.实施例2
47.请参阅图1、2、4、5,本发明提供一种用于水下开孔的小型rov,所述小型rov包括rov机构和水下钻孔机构14;
48.所述rov机构包括主框架1,所述主框架1上安装有上浮力板2和下浮力板3,所述主框架1中安装有上浮力板2的一侧安装有起吊头4,所述主框架1中安装有下浮力板3的一侧安装有水下钻孔机构14、水下磁性吸附装置、照明装置5和摄像装置6,防护装置7安装在所述主框架1的外侧;所述主框架1中安装有四个垂直推进器9,所述垂直推进器9与所述主框架1的垂直轴线的夹角为15
°
;所述主框架1中安装有四个水平推进器10,所述水平推进器10与所述主框架1的水平轴线的夹角为45
°
;所述主框架1的侧面安装电动云台11,所述电动云台11上安装有所述照明装置5和摄像装置6;所述主框架1中设置有主控舱12,所述主控舱12均与所述电动云台11、照明装置5和摄像装置6电连接;所述垂直推进器9和水平推进器10中均包括水下充油电机13,所述水下充油电机13与所述主控舱12电连接;所述水下充油电机13为感应电机;所述水下磁性吸附装置包括四个呈矩形分布的水下电磁铁8,该矩形的几何中心处安装水下钻孔机构14;
49.所述水下钻孔机构14包括rov安装座1401,所述rov安装座1401与所述主框架1连接;所述rov安装座1401与钻孔机安装座1402连接;所述钻孔机安装座1402上安装有滑轨1403,所述滑轨1403与切割电机1404通过滑块1405连接,所述滑块1405与进给电机1406通
过丝杆1407连接;所述切割电机1404与钻刀1408传动连接,所述切割电机1404上安装有位移传感器1409;所述切割电机1404、进给电机1406和位移传感器1409均与所述主控舱12电连接;所述钻刀1408的内部安装有强力磁铁15,所述钻刀1408的钻孔直径为20~60mm;所述切割电机1404和进给电机1406均为直流无刷电机,所述直流无刷电机中安装有水下减速器1410,所述水下减速器1410为涡轮蜗杆减速机。
50.工作过程与实施例1相同。
51.综上所述,本发明的小型rov搭载了水下小型钻机,可进行水下钻孔和取样,同时该小型rov还具有机动性好、操作灵活及较大的抗流能力等优点。所以,本发明有效克服了现有技术中的种种缺点而具高度产业利用价值。
52.上述实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。