1.本实用新型涉及无人船技术领域,具体涉及一种升降式水质监测水上机器人。
背景技术:
2.无人船是一种通过遥控方式或者自主航行方式,借助精确卫星定位和自身传感即可按照预设任务在水面航行,同步开展环境调查、水域测绘、人员搜救等活动的智能化水面机器人。由于无人船能够实现整个水上作业过程的“智能化”、“网络化”与“无人化”,因此,无人船在各个应用领域中都开始广泛应用,如目前应用于水质监测的水上机器人(即无人船),其解决了现阶段水质监测需要工作人员紧跟的问题,然而现有的用于水质监测的水上机器人只能够监测特定深度的水质,无法根据需要对监测深度进行调节,同时在监测的过程中,其摄像监测的角度无法调节,还容易受到水下垃圾的影响,从而影响监测的精准性。
技术实现要素:
3.(一)解决的技术问题
4.本实用新型提供了一种升降式水质监测水上机器人,能够对不同深度的水位进行监测,同时还能够调节摄像头的监测角度,满足不同的使用需求。
5.(二)技术方案
6.为解决上述技术问题,本实用新型提供如下技术方案:一种升降式水质监测水上机器人,包括船体和用于监测水质的监测机构,监测机构设于船体下方,且监测机构包括用于监测水下状况的摄像头和监测传感器,还包括升降装置和角度调节装置。
7.升降装置包括升降件和升降驱动机构,升降件移动设于船体上,且底端穿过船体,升降驱动机构的输出端朝向水底设置且和升降件连接,升降驱动机构驱动升降件朝向水底升降运动;
8.角度调节装置包括旋转件和旋转驱动机构,升降件内部中空,旋转件轴向固定于升降件内部,且旋转件底端伸出升降件与监测机构连接,旋转驱动机构的输出端与旋转件连接,旋转驱动机构驱动旋转件和监测机构一同转动,以调节摄像头的监测角度。
9.进一步设置,前述的升降驱动机构包括升降电机和丝杆螺母组件,升降电机的输出端与丝杆连接,升降件与螺母连接。
10.如此设置,升降电机启动,通过丝杆螺母组件驱动升降件朝向水底升降运动。
11.进一步设置,前述的旋转驱动机构包括旋转电机和伸缩连杆,旋转电机的输出端与伸缩连杆连接,伸缩连杆与旋转件周向固定连接。
12.如此设置,旋转电机启动,驱动伸缩连杆转动,从而驱动旋转件随之转动。
13.进一步设置,前述的旋转电机的输出端设有主动齿轮,伸缩连杆上设有与主动齿轮啮合的从动齿轮。
14.如此设置,旋转电机启动时,通过相互啮合的主动齿轮和从动齿轮驱动伸缩连杆转动,且通过直径小的主动齿轮驱动直径大的从动齿轮,大大减小了旋转电机的转速,便于
精准调节摄像头的监测角度。
15.进一步设置,前述的旋转件上开设有用于供伸缩连杆底端插入的插槽,且伸缩连杆和插槽均呈正六棱柱结构。
16.如此设置,升降件升降时,由于伸缩连杆和插槽均呈正六棱柱结构,能够保证伸缩连杆能够相对旋转件竖向滑动,且不能相对旋转件转动。
17.进一步设置,前述的旋转件上设有环状的防护栅网,防护栅网位于监测机构外侧,防护栅网用于防止杂质或垃圾贴附在监测机构外侧。
18.如此设置,避免水质垃圾或其他杂质对监测结果的不利影响,提高监测的精准性。
19.进一步设置,前述的升降件上至少设有一个清理刷板,且清理刷板与防护栅网外表面接触。
20.如此设置,防护栅网随旋转件转动时,清理刷板和防护栅网相对运动,使清理刷板对防护栅网表面进行清理,避免杂质贴附在防护栅网表面上。
21.(三)有益效果
22.与现有技术相比,本实用新型提供的一种升降式水质监测水上机器人,具备以下有益效果:
23.本实用新型通过升降装置能够驱动升降件朝向水底升降运动,升降件驱动监测机构随之朝向水底升降运动,从而对不同深度的水位进行监测;通过角度调节装置能够驱动旋转件和监测机构一同转动,从而调节摄像头的监测角度,满足不同的使用需求。
附图说明
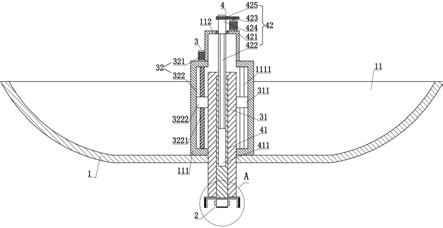
24.图1为本实用新型的结构剖视图;
25.图2为图1中a处的放大示意图;
26.图3为升降件和旋转件的结构示意图。
27.附图标号:1、船体;11、船舱;111、固定柱;1111、导向滑杆;112、顶框;2、监测机构;21、摄像头;22、监测传感器;3、升降装置;31、升降件;311、升降滑块;312、清理刷板;313、限位底板;32、升降驱动机构;321、升降电机;322、丝杆螺母组件;3221、丝杆;3222、螺母;4、角度调节装置;41、旋转件;411、插槽;412、防护栅网;413、安装板;414、监测支柱;42、旋转驱动机构;421、旋转电机;422、伸缩连杆;423、主动齿轮;424、传动轴;425、从动齿轮。
具体实施方式
28.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
29.请参阅图1、图2和图3所示,其中,图1为本实用新型的结构剖视图,图2为图1中a处的放大示意图,图3为升降件和旋转件的结构示意图。
30.本实用新型提供的一种升降式水质监测水上机器人,包括船体1和用于监测水质的监测机构2,监测机构2安装于船体1下方,且监测机构2包括用于监测水下状况的摄像头21和监测传感器22,监测传感器22包括对水的ph、流量和水位等进行检测的各个传感器,水
上机器人还包括升降装置3和角度调节装置4。
31.升降装置3包括升降件31和升降驱动机构32,升降件31移动安装于船体1上,且底端穿过船体1,升降驱动机构32的输出端朝向水底且和升降件31连接,升降驱动机构32驱动升降件31朝向水底升降运动。
32.角度调节装置4包括旋转件41和旋转驱动机构42,升降件31内部中空,旋转件41通过轴承轴向固定于升降件31内部,且旋转件41底端伸出升降件31与监测机构2通过螺栓固定连接,旋转驱动机构42的输出端与旋转件41连接,旋转驱动机构42驱动旋转件41和监测机构2一同转动,以调节摄像头21的监测角度。
33.如此,通过升降装置3能够驱动升降件31朝向水底升降运动,升降件31驱动监测机构2随之朝向水底升降运动,从而对不同深度的水位进行监测;通过角度调节装置4能够驱动旋转件41和监测机构2一同转动,从而调节摄像头21的监测角度,满足不同的使用需求。
34.升降驱动机构32包括升降电机321和丝杆螺母组件322,丝杆螺母组件322安装于固定柱111内部,升降电机321的输出端与丝杆3221焊接,升降件31外侧与螺母3222焊接连接。如此,升降电机321启动,通过丝杆螺母组件322驱动升降件31朝向水底升降运动。
35.固定柱111内部通过轴承轴向固定有沿丝杆3221延伸方向延伸的导向滑杆1111,升降件31外侧焊有与导向滑杆1111螺纹配合的升降滑块311,如此,升降件31升降时,带动升降滑块311沿导向滑杆1111滑动,升降滑块311和导向滑杆1111配合,提高升降件31升降运动的稳定性。
36.升降滑块311与螺母3222对称分布在升降件31两侧。
37.旋转驱动机构42包括旋转电机421和伸缩连杆422,旋转电机421的输出端与伸缩连杆422传动连接,伸缩连杆422与旋转件41周向固定连接。如此,旋转电机421启动,驱动伸缩连杆422转动,从而驱动旋转件41随之转动。
38.旋转电机421的输出端焊有主动齿轮423,伸缩连杆422顶部焊有传动轴424,传动轴424上装有与主动齿轮423啮合的从动齿轮425,且主动齿轮423的直径小于从动齿轮425的直径。如此,旋转电机421启动时,通过相互啮合的主动齿轮423和从动齿轮425驱动伸缩连杆422转动,且通过直径小的主动齿轮423驱动直径大的从动齿轮425,大大减小了旋转电机421的转速,便于精准调节摄像头21的监测角度。
39.旋转件41上开有用于供伸缩连杆422底端插入的插槽411,且伸缩连杆422和插槽411均呈正六棱柱结构,从而周向固定连接伸缩连杆422与旋转件41,且插槽411还能避免旋转件41随升降件31升降运动时,伸缩连杆422和旋转件41发生干涉。如此,升降件31升降时,由于伸缩连杆422和插槽411均呈正六棱柱结构,能够保证伸缩连杆422能够相对旋转件41竖向滑动,且不能相对旋转件41转动。
40.船体1具有船舱11,船舱11内焊有固定柱111,固定柱111内部中空,升降电机321安装于固定柱111外侧,升降电机321的输出端伸入固定柱111内部,并与丝杆3221固定连接,如此,能够避免升降电机321进水,导致损坏。
41.固定柱111上方焊有顶框112,旋转电机421安装于顶框112外侧,传动轴424通过轴承与顶框112轴向固定连接,从而将伸缩连杆422轴向固定于顶框112和固定柱111内部。
42.传动轴424内部中空,且传动轴424和伸缩连杆422内部均与插槽411连通,如此,能够根据实际需求放置导线。
43.船舱11内安装有现有技术中的太阳能充电设备,太阳能充电设备用于为水上机器人供电,以降低整体的功耗。
44.旋转件41上装有环状的防护栅网412,防护栅网412位于监测机构2外侧,防护栅网412用于防止杂质或垃圾贴附在监测机构2外侧。如此,避免水质垃圾或其他杂质对监测结果的不利影响,提高监测的精准性。
45.旋转件41和监测机构2之间焊有安装板413,防护栅网412位于安装板413底部。安装板413底部还焊有监测支柱414,摄像头21有两个,分别安装于监测支柱414两侧,监测传感器22安装于监测支柱414底端。
46.升降件31上装有两个清理刷板312,且清理刷板312与防护栅网412外表面接触。如此,防护栅网412随旋转件41转动时,清理刷板312和防护栅网412相对运动,使清理刷板312对防护栅网412表面进行清理,避免杂质贴附在防护栅网412表面上。
47.升降件31底部通过螺栓固定有环状的限位底板313,清理刷板312位于限位底板313上。
48.在水上机器人移动的过程中,当需要对水质进行监测时,启动监测机构2,通过摄像头21和监测传感器22对水下状况进行监测;当需要对不同深度的水位进行监测时,启动升降电机321,通过丝杆螺母组件322驱动升降件31朝向水底升降运动,升降件31升降运动时,带动旋转件41和监测机构2一同升降运动,从而调节监测机构2在水中的监测深度;当需要调节摄像头21的监测角度时,启动旋转电机421,通过相互啮合的主动齿轮423和从动齿轮425驱动伸缩连杆422转动,从而驱动旋转件41和监测机构2随之转动,从而转动摄像头21以调节摄像头21的监测角度;旋转件41转动过程中,防护栅网412随之转动,使清理刷板312和防护栅网412相对运动,清理刷板312对防护栅网412表面进行清理,避免杂质贴附在防护栅网412表面上。
49.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。