1.本发明涉及无人船投放技术领域,具体为一种针对大型船只的无人船探测投放装置。
背景技术:
2.无人船是一种水面自主运载平台,在水体环境调查、海上目标抵近侦查等领域应用广泛,在大型船只航行过程中,经常需要通过无人船探测海域情况,无人船海上布放回收技术是无人船以水面舰艇为母船执行海上任务时,对无人船实施布放,确保无人船顺利执行任务,并在完成任务返航后及时可靠回收的技术。在海上,尤其是高海况条件时的无人船海上布放回收面临的挑战包括布放回收作业的安全和可操作性,以及布放回收装置的自主和通用性等问题,目前针对无人船的海上布放技术,主要通过人力挂扣,人力挂扣的风险较大,尤其是在海上环境比较恶劣的情况下,容易造成人员伤害,并且自动化程度较低。
3.对此,授权公告号为cn207191320u的中国发明专利公开了一种无人船布放回收装置,该无人船布放回收装置设置于无人船上,包括撑杆、挂钩、第一锁紧装置、控制系统、第一卷缆器、第二卷缆器、止荡绳和引导绳。撑杆设置于船体一侧,其一端铰接于船体,另一端设置有活接挂钩;控制系统通过控制第一锁紧装置的锁紧和解锁来实现撑杆的收起和撑开;挂钩上连接有止荡绳和引导绳,止荡绳和引导绳的另一端缠绕分别缠绕于第一卷缆器、第二卷缆器中,第一卷缆器、第二卷缆器分别固定于船体上。本发明还公开了相应的无人船和无人船布放回收系统。根据本发明的技术方案,无人船布放回收装置可以与母船上的起吊结构相互配合,实现无人船的自动化布放及回收。
4.该无人船布放回收装置实现了自动化布放及回收,自动化程度高,并且更加安全,但是在投放无人船时,无人船会产生晃动,容易与母船发生碰撞,可能会导致母船或者无人船损坏的情况,此外在投放时无法微调投放位置,实用性低,有时必须通过晃动投放绳索来调整位置,非常不便。
5.为此我们提出一种针对大型船只的无人船探测投放装置用于解决上述问题。
技术实现要素:
6.本发明的目的在于提供一种针对大型船只的无人船探测投放装置,以解决上述背景技术中提出的问题。
7.为实现上述目的,本发明提供如下技术方案:一种针对大型船只的无人船探测投放装置,包括大型母船及无人船本体,所述大型母船顶面固接吊索机构,所述吊索机构上设置有钢索绳,所述大型母船顶面边缘处设置有调整机构,所述调整机构包括转动连接在大型母船边缘顶面的转动座,所述转动座顶面开设槽口,所述槽口内转动连接转柱,所述转柱上开设滑孔,所述滑孔内滑动连接调整臂,所述调整臂远离大型母船一端固接导向环,所述导向环内滑动连接钢索绳。
8.优选的,所述调整臂顶面开设多个插孔,所述转柱顶面开设螺纹通孔,所述螺纹通
孔连通滑孔,所述螺纹通孔内螺纹连接锁紧螺栓,所述锁紧螺栓顶面固接手轮,所述锁紧螺栓底端插接在任意一个插孔内,所述转柱与槽口转动连接处转动连接锁紧销轴,所述锁紧销轴端部位于转动座外侧。
9.优选的,所述无人船本体顶面固接投放组件,所述投放组件包括固接在无人船本体顶面的固定座,所述固定座侧壁固接传动仓,所述传动仓靠近固定座一侧开设转槽。
10.优选的,所述转槽内转动连接两个转杆,两个所述转杆自由端分别固接两个夹持半环。
11.优选的,所述固定座顶面开设圆形插口,所述钢索绳自由端固接连接柱,所述连接柱底端固接连接圆板,所述连接圆板插接在圆形插口内,所述连接圆板直径及厚度与圆形插口直径及厚度一致,所述夹持半环内径与连接柱外径一致。
12.优选的,所述传动仓内设置有传动组件,所述传动组件包括转动连接在传动仓内的遥控电机,所述遥控电机转轴处固接蜗杆,两个所述转杆转轴处分别固接两个蜗轮,所述蜗杆位于两个蜗轮之间,所述蜗杆啮合连接两个蜗轮。
13.与现有技术相比,本发明的有益效果是:
14.本发明设置了调整机构,一方面调整机构可以将钢索绳的位置向大型母船外侧移动,可以避免投放过程中无人船本体晃动撞击大型母船侧壁的情况,避免大型母船及无人船本体损坏,此外可以通过调整机构调整导向环及钢索绳的位置,进而方便微调无人船本体的投放位置。
附图说明
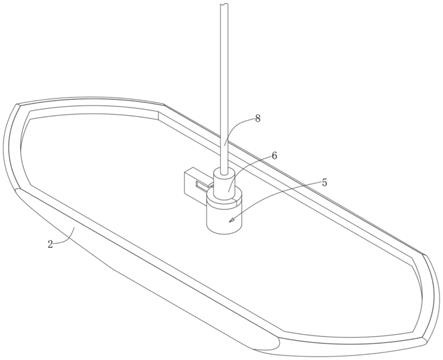
15.图1为本发明无人船本体处结构示意图;
16.图2为本发明中投放时结构放大结构示意图;
17.图3为本发明调整机构处结构放大结构示意图;
18.图4为本发明中投放组件处结构放大结构示意图;
19.图5为本发明传动组件处结构放大结构示意图。
20.图中:1、大型母船;2、无人船本体;3、吊索机构;4、调整机构;5、投放组件;6、连接柱;7、传动组件;8、钢索绳;41、转动座;42、槽口;43、转柱;44、滑孔;45、调整臂;46、导向环;47、插孔;48、螺纹通孔;49、锁紧螺栓;410、手轮;411、锁紧销轴;51、固定座;52、圆形插口;53、传动仓;54、转槽;55、转杆;56、夹持半环;61、连接圆板;71、遥控电机;72、蜗杆;73、蜗轮。
具体实施方式
21.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
22.请参阅图1
‑
5,本发明提供一种技术方案:一种针对大型船只的无人船探测投放装置,包括大型母船1及无人船本体2,大型母船1顶面固接吊索机构3,吊索机构3上设置有钢索绳8,大型母船1顶面边缘处设置有调整机构4,调整机构4包括转动连接在大型母船1边缘
顶面的转动座41,转动座41顶面开设槽口42,槽口42内转动连接转柱43,转柱43上开设滑孔44,滑孔44内滑动连接调整臂45,调整臂45远离大型母船1一端固接导向环46,导向环46内滑动连接钢索绳8。
23.请参阅图4,无人船本体2顶面固接投放组件5,投放组件5包括固接在无人船本体2顶面的固定座51,固定座51侧壁固接传动仓53,传动仓53靠近固定座51一侧开设转槽54,转槽54内转动连接两个转杆55,两个转杆55自由端分别固接两个夹持半环56。
24.请参阅图4,固定座51顶面开设圆形插口52,钢索绳8自由端固接连接柱6,连接柱6底端固接连接圆板61,连接圆板61插接在圆形插口52内,连接圆板61直径及厚度与圆形插口52直径及厚度一致,夹持半环56内径与连接柱6外径一致,在进行无人船本体2投放时,将钢索绳8端部连接柱6上的连接圆板61插入至无人船2本体上的投放组件5上的圆形插口52内。
25.请参阅图4
‑
5,传动仓53内设置有传动组件7,传动组件7包括转动连接在传动仓53内的遥控电机71,遥控电机71转轴处固接蜗杆72,两个转杆55转轴处分别固接两个蜗轮73,蜗杆72位于两个蜗轮73之间,蜗杆72啮合连接两个蜗轮73,通过遥控控制遥控电机71启动,通过蜗杆72与蜗轮73相互啮合下使得两个夹持半环56向内侧转动,之后夹持住连接柱6外侧,即可完成无人船本体2的固定,之后将无人船本体2投放在大型母船1外,通过吊索机构3操作钢索绳8对无人船本体2投放,当无人船本体2到达海面后,通过遥控控制遥控电机71反转,使得两个夹持半环56向外侧转动,之后通过钢索绳8将连接柱6收回即可完成无人船本体2的投放。
26.请参阅图3,调整臂45顶面开设多个插孔47,转柱43顶面开设螺纹通孔48,螺纹通孔48连通滑孔44,螺纹通孔48内螺纹连接锁紧螺栓49,锁紧螺栓49顶面固接手轮410,锁紧螺栓49底端插接在任意一个插孔47内,转柱43与槽口42转动连接处转动连接锁紧销轴411,锁紧销轴411端部位于转动座41外侧,调整臂45可以转动,并且可以通过松开锁紧螺栓49调整调整臂45在滑孔44内的滑移位置,并可以通过锁紧销轴411及锁紧螺栓49上的手轮410将调整臂45位置锁定,进而可以调整调整臂45端部导向环46的位置,进而可以调整钢索绳8的整体角度,进而微调无人船本体2的投放位置,本发明设置了调整机构4,一方面调整机构4可以将钢索绳8的位置向大型母船1外侧移动,可以避免投放过程中无人船本体2晃动撞击大型母船1侧壁的情况,避免大型母船1及无人船本体2损坏,此外可以通过调整机构4调整导向环46及钢索绳8的位置,进而方便微调无人船本体2的投放位置。
27.工作原理:本发明,在进行无人船本体2投放时,将钢索绳8端部连接柱6上的连接圆板61插入至无人船2本体上的投放组件5上的圆形插口52内,之后通过遥控控制遥控电机71启动,通过蜗杆72与蜗轮73相互啮合下使得两个夹持半环56向内侧转动,之后夹持住连接柱6外侧,即可完成无人船本体2的固定,之后将无人船本体2投放在大型母船1外,通过吊索机构3操作钢索绳8对无人船本体2投放,当无人船本体2到达海面后,通过遥控控制遥控电机71反转,使得两个夹持半环56向外侧转动,之后通过钢索绳8将连接柱6收回即可完成无人船本体2的投放,在投放时调整臂45可以转动,并且可以通过松开锁紧螺栓49调整调整臂45在滑孔44内的滑移位置,并可以通过锁紧销轴411及锁紧螺栓49上的手轮410将调整臂45位置锁定,进而可以调整调整臂45端部导向环46的位置,进而可以调整钢索绳8的整体角度,进而微调无人船本体2的投放位置,本发明设置了调整机构4,一方面调整机构4可以将
钢索绳8的位置向大型母船1外侧移动,可以避免投放过程中无人船本体2晃动撞击大型母船1侧壁的情况,避免大型母船1及无人船本体2损坏,此外可以通过调整机构4调整导向环46及钢索绳8的位置,进而方便微调无人船本体2的投放位置。
28.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。