一种x型舵潜航器及其舵卡抗沉方法
技术领域
1.本技术属于潜航器设计技术领域,尤其涉及一种x型舵潜航器及其舵卡抗沉方法。
背景技术:
2.自主潜航器作为水下作业无人载具,在科考领域扮演重要角色,可在水下自主勘探;在军事领域,具有隐蔽性,可在危险海域侦查敌情、援潜救生等。随着海洋资源探索需求不断提高,各国更加重视对自主潜航器技术的研究,根据作业性质,以桨、舵联合操纵型自主潜航器最常见,传统控制结构的潜航器难以应对变模型、变工况的抗沉问题。例如中国专利cn107264752a公开了一种四螺旋桨推进的无舵水下无人潜航器,其本身由四台电机分别带动四个螺旋桨转动来推进潜航器前行,且尾舵不设调整方向,推动效率高,但可控性差,容错性能低,不具备应对螺旋桨故障险情突发情况的应对能力。cn107792325b适用于微型无人潜航器的尾部集成结构及其操舵方法提供以一种适用于x形尾舵结构的驱动控制结构,虽然能够实现尾舵独立控制,但由于其采用拉杆、转轴结构隔离控制的方式,舵机驱动动作需经由较长的传递渠道转换为尾舵的动作,这导致实际应用时,舵机的转角动作无法精准快速的转换为尾舵的对应动作。在可靠性方面,没有应对舵卡抗沉异常情况容错控制。
技术实现要素:
3.本技术的目的在于,提供一种操纵性、机动性和生存性好,在变工况下具有更好适应性,能够提升潜航器稳态工况下的控制性和危险工况下的安全性的x型舵潜航器及其舵卡抗沉方法。
4.为实现上述目的,本技术采用如下技术方案。
5.一种x型舵抗沉自主潜航器,包括艇体、驱动系统、电控系统;
6.驱动系统包括:设于艇体艉部呈x型布置的四个舵叶、设于艇体内部与各舵叶连接的四个独立的大扭力防水舵机;设于艇体艉部的螺旋桨、设于艇体内部用于驱动螺旋桨的驱动电机;
7.电控系统包括:上位控制组件、电源组件、驱动组件、数据采集组件、运动控制组件、嵌入组件;具体而言:
8.所述上位控制组件,包括pc上位机,所述pc上位机内建cvi交互组件,并通过lora模块与控制组件通讯;
9.所述电源组件包括电池组、电平稳压功率电源组件;所述电池组经电平稳压功率电源组件转换电压并输出5v和12v直流电;
10.所述数据采集组件包括传感器组;传感器组包括惯性传感器、深度传感器、电导率传感器、水下距离传感器,各组件采用两路485总线传输,以保证满足不同波特率通讯需求;
11.所述控制组件包括控制采集板、jetsonnano开发板、差分转换器、隔离驱动器、继电器、ldo稳压器;
12.所述控制采集板定时查询两路485总线上的传感器数据并通过两路485总线通讯,
一路485总线连接电导率和距离传感器,另一路485总线连接深度传感器和lora通讯组件;控制采集板采用光耦隔离,经过升压驱动控制继电器;控制采集板通过lora模块与pc上位机通讯传输数据,同时根据pc上位机控制指令,经过隔离驱动器升压驱动控制两路继电器进而操控活塞式压载水舱;控制采集板通过ttl串口与jetsonnano开发板通讯,所述jetson nano开发板用于完成推进器调速,根据惯性传感器等传感器数据、基于drl算法对auv艉部呈x型布置的4个舵叶进行控制,实现对auv六自由度运动的驱动控制;所述jetson nano开发板通过tll串口与运动控制系统进行通讯控制;lora通讯组件用于实现水面以上的配置和数据传输,选取远程通讯组件lora,其通过ttl
‑
rs485转换组件,连接至485
‑
1#总线,与pc上位机一对一定点传输,在水面以上接受配置指令和航行完成上浮后的传感器数据上载;
13.所述运动控制组件包括一块经ttl串口连接至jetson nano开发板并受其控制的脉冲宽度调制器,所述脉冲宽度调制器用于驱动控制防水舵机以及驱动电机,实现auv六自由度运动和调速控制;上浮下潜采用舵叶协同活塞式压载水舱实现。
14.对前述x型舵抗沉自主潜航器的进一步改进或优选方案,所述艇体的上表面和下表面还开设若干流水孔;艇体内部设置有舵杆用于调整重力以及重心分布的配重块,具体而言,在将各零部件均衡分布在密封舱内部,将活塞式压载水舱置于重心位置后,利用配重块平衡舱体,以使x型舵抗沉自主潜航器呈零浮力状态。
15.对前述x型舵抗沉自主潜航器的进一步改进或优选方案,所述传感器组中,深度传感器搭载采用24位ad精度的ms5837
‑
30ba压力传感器,ms5837
‑
30ba压力传感器还需经解算板转发为115200波特率串口通讯;电导率传感器型号为ectds10
‑
iso;水下距离传感器型号为超声波水下距离传感器;北斗/gps双模定位组件型号为atgm336h,当auv上浮至水面,经lora通讯组件将坐标信息上传至上位机;惯性传感器采用icm
‑
20948九轴运动追踪模组。
16.对前述x型舵抗沉自主潜航器的进一步改进或优选方案,所述控制采集板采用采用gd32f103c8t6为控制采集板核心;还包括由tlp521和uln2083组成的驱动隔离升压电路,uln2083输出控制继电器。
17.对前述x型舵抗沉自主潜航器的进一步改进或优选方案,4片舵叶正交布置,每片舵叶独立偏转;舵轴中心与潜艇中线面的夹角为45
°
,叶片转动引起潜艇的偏转和潜浮;所述运动控制组件采用控制方案如下:针对x型舵抗沉自主潜航器可能执行的直线航行、变航向航行、舵卡上浮三种任务,分别采用两种drl算法:ddpg和ppo,以及三种奖励函数:反正切奖励函数、线性奖励函数、二次奖励函数进行训练,对比后选择最优的算法和奖励函数组合来执行相应任务。
18.对前述x型舵抗沉自主潜航器的进一步改进或优选方案,开关考虑采用无源触电防水开关、大功率继电器作为锂电池开关,选定额定参数为12v,30a的直流继电器chs01
‑
s
‑
112la(30a),线圈吸收二极管选用1n4007;而稳压电路采用三路mornsun(金升阳)的vrb1205s
‑
10wr3隔离型dc
‑
dc模块,分别对于舵机、控制器进行供电。稳压电路输入端串入1.1a自恢复保险丝bsmd0805
‑
110
‑
12v,瞬间熔断电流2a,结合dc
‑
dc模块自身的防反、过流保护可较为有效保护后级电路及其存储的数据。
19.对前述x型舵抗沉自主潜航器的进一步改进或优选方案,还包括潜航器壳体1,潜航器壳体1尾端设置有四个舵叶安装孔1a,舵叶安装孔1a的前后侧设置有舵机固定孔1b,舵叶安装孔1a和舵机固定孔1b由贯通壳壁延伸至潜航器壳体1内部。
20.对前述x型舵抗沉自主潜航器的进一步改进或优选方案,所述大扭力防水舵机2设置于潜航器壳体1内部,且通过螺栓螺母组与舵机固定孔1b配合连接;大扭力防水舵机2的转轴对准舵叶安装孔1a中心且指向潜航器壳体1外部;大扭力防水舵机2的转轴末端设置有第一连接法兰结构2a;
21.所述舵叶3安装于各舵叶安装孔1a中,舵叶3的舵杆末端设置有可以与第一连接法兰结构2a对接的第二连接法兰结构3a。
22.对前述x型舵抗沉自主潜航器的进一步改进或优选方案,所述第一连接法兰结构2a和第二连接法兰结构3a尺寸与舵叶安装孔1a匹配。
23.用于前述x型舵潜航器的舵卡抗沉方法,所述舵卡抗沉方法用于解决掉深和舵卡险情下的auv运动问题,具体而言:
24.当航行器遭遇舵卡的情况,随机设置一个舵卡位置和角度,给定预设好的目标姿态,通过auv控制器输出信号,控制剩余三个舵叶结合螺旋桨实现上浮自救;
25.当航行器遭遇掉深的情况,随机设置一个舵卡位置和角度,给定预设好的目标姿态,通过auv控制器输出信号,控制舵叶结合螺旋桨实现上浮自救。
26.在计算过程中,x舵的4片舵叶正交布置,每片舵叶均能独立控制;舵轴中心与潜艇中线面的夹角为45
°
,叶片转动引起潜艇的偏转和潜浮;x
‑
auv在水中的运动视作刚体在流体中的空间运动,包括6个运动自由度,分别为沿艇体运动坐标系x,y,z方向的平动和转动,搭建auv数值模型和水下仿真环境,针对x
‑
auv执行舵卡上浮任务,采用ddpg算法和反正切奖励函数对指潜航器模型进行训练,并对其结果进行了对比和分析。
27.以jetson nano为实艇auv的运动控制中心,对其进行必要的配置之后,将仿真环境中训练好的智能体模型直接迁移到jetson nano上,使其能够启动auv推进器、控制艉部4个舵叶完成各项任务。
28.其有益效果在于:
29.本技术的x型舵抗沉自主潜航器能够实现六自由度航行,配合其运动学和动力学模型,在正常运行的情况下,能够在水下运动因故障发生舵卡情况时,控制其余舵叶和推进器灵活调节航行姿态和参数,在前述状况下仍具有上浮自救、主动抗沉等能力。
30.本技术的x型舵抗沉自主潜航器结构的生存能力高,便于实现挽回操作,能够快速进行适应性改造,运用于各类型尺寸和吨位的潜航器结构,相对于传统潜航设备,在复杂环境下能具有更好的控制性能。
附图说明
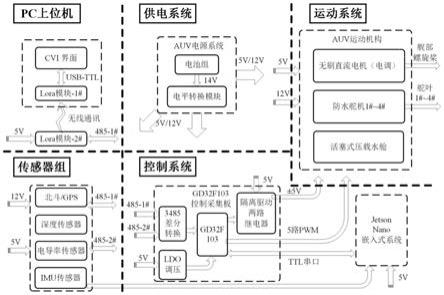
31.图1是x型舵抗沉自主潜航器的拓扑结构示意图;
32.图2是运动控制组件中控制采集核心的电路示意图;
33.图3是驱动隔离升压电路的示意图;
34.图4是x型舵抗沉自主潜航器壳体结构示意图;
35.图5是x型舵抗沉自主潜航器壳体内x舵分布结构示意图;
36.图6是舵叶结构示意图;
37.图7是有效控制下4号舵舵卡10
°
的auv控制信号示意图;
38.图8是有效控制下4号舵舵卡10
°
的和姿态示意图;
39.图9是失控下4号舵舵卡10
°
的auv控制信号示意图;
40.图10是失控下4号舵舵卡10
°
的和姿态示意图。
具体实施方式
41.以下结合具体实施例对本技术作详细说明。
42.本技术的一种x型舵抗沉自主潜航器,用于提供一种能够实现更稳定运行状态,在突发情况时能够获得更好的安全性,可以实现远程数据采集和控制,灵活配置各种巡航算法等功能的自主潜航器。
43.如图1所示,x型舵抗沉自主潜航器的基本组成结构包括艇体、驱动系统、电控系统;其中艇体与传统潜航器水滴流线型艇体结构一致。
44.本x型舵抗沉自主潜航器采用x型舵结构,其驱动系统包括:设于艇体艉部呈x型布置的四个舵叶、设于艇体内部与各舵叶连接的四个独立的大扭力防水舵机;设于艇体艉部的螺旋桨、设于艇体内部用于驱动螺旋桨的驱动电机;
45.四个独立舵机控制的舵叶,能够实现独立控制,在某个舵叶卡住或者遭遇险情时,能够通过调节其他舵叶的姿态来恢复航行姿态,实现上浮自救。
46.电控系统包括:上位控制组件、电源组件、驱动组件、数据采集组件、运动控制组件、嵌入组件;具体而言:
47.上位控制组件,包括pc上位机,pc上位机内建cvi交互组件,并通过lora模块与控制组件通讯;上位控制组件和运动控制组件通过lora实现通讯传输,以控制舵机以及压载水舱的状态,进而对潜航器运行姿态进行控制,实现远程数据收集和设备控制。
48.电源组件包括电池组、电平稳压功率电源组件;电池组经电平稳压功率电源组件转换电压并输出5v和12v直流电;
49.在具体实施过程中,以三并四串4s的锂电池组进行电平转换及稳压,以供各级电气机构使用,系统主要功耗部件组成包括:无刷直流电机尾舵螺旋桨;四路舵机x型舵叶;直流减速电机活塞式压载水舱;jeston nano顶层控制核心;gd32核心的次级控制器控制采集板;传感器组。其中无刷电机电调、电导率传感器可直连至电池组。
50.本实施例中,舵机额定电流为0.5a,5v供电;直流减速电机采用5v供电,额定电流0.9a;jeston nano采用micro usb供电并配置为的5w低功耗模式;gd32控制采集版主要功耗为两路5v继电器,单片机部分经过线性稳压芯片ams1117
‑
3.3得到3.3v供电,整板功耗估约3.2w;传感器组总功耗共2w。
51.因而本实施例中设计稳压供电部分功耗如下:
[0052][0053]
根据功率核算结果,提供一种优选设计方法,其中开关考虑采用无源触电防水开关、大功率继电器作为锂电池开关,选定额定参数为12v,30a的直流继电器chs01
‑
s
‑
112la(30a),线圈吸收二极管选用1n4007。各性能参数均可满足使用需求。
[0054]
而稳压电路采用三路mornsun(金升阳)的vrb1205s
‑
10wr3隔离型dc
‑
dc模块,分别对于舵机、控制器进行供电。稳压电路输入端串入1.1a自恢复保险丝bsmd0805
‑
110
‑
12v,瞬间熔断电流2a,结合dc
‑
dc模块自身的防反、过流保护可较为有效保护后级电路及其存储的
数据。
[0055]
数据采集组件包括传感器组;传感器组包括惯性传感器、深度传感器、电导率传感器、水下距离传感器,各组件采用两路485总线传输,以保证满足不同波特率通讯需求;
[0056]
基于多传感器组件能够获知潜航器实际航行时设备以及环境的数据和状态信息,以便于在自动控制和远程控制时保证能够执行更准确有效的操作,提高潜航器的安全性和控制效率。
[0057]
控制组件包括控制采集板、jetsonnano开发板、差分转换器、隔离驱动器、继电器、ldo稳压器;
[0058]
控制采集板定时查询两路485总线上的传感器数据并通过两路485总线通讯,一路485总线连接电导率和距离传感器,另一路485总线连接深度传感器和lora通讯组件;控制采集板采用光耦隔离,经过升压驱动控制继电器;
[0059]
控制采集板通过lora模块与pc上位机通讯传输数据,同时根据pc上位机控制指令,经过隔离驱动器升压驱动控制两路继电器进而操控活塞式压载水舱;
[0060]
控制采集板通过ttl串口与jetsonnano开发板通讯,jetson nano开发板用于完成推进器调速,根据惯性传感器等传感器数据、基于drl算法对auv艉部呈x型布置的4个舵叶进行控制,实现对auv六自由度运动的驱动控制;jetson nano开发板通过tll串口与运动控制系统进行通讯控制;
[0061]
本实施例中采用gd32f103c8t6为核心设计控制采集板,编程实现ttl、485通讯、多传感器深度、电导率、温度采集、继电器隔离驱动等功能,串口与nano通讯;两路485通讯,一路连接电导率,另一路连接深度传感器和lora通讯模块;采用tlp521光耦隔离,经过uln2803升压驱动,控制继电器,此外六路pwm经过330r限流电阻外接控制舵机和驱动电机。
[0062]
lora通讯组件用于实现水面以上的配置和数据传输,选取远程通讯组件lora,其通过ttl
‑
rs485转换组件,连接至485
‑
1#总线,与pc上位机一对一定点传输,在水面以上接受配置指令和航行完成上浮后的传感器数据上载;运动控制组件包括一块经ttl串口连接至jetson nano开发板并受其控制的脉冲宽度调制器,脉冲宽度调制器用于驱动控制防水舵机以及驱动电机,实现auv六自由度运动和调速控制;上浮下潜采用舵叶协同活塞式压载水舱实现。
[0063]
艇体的上表面和下表面还开设若干流水孔;艇体内部设置有舵杆用于调整重力以及重心分布的配重块,具体而言,在将各零部件均衡分布在密封舱内部,将活塞式压载水舱置于重心位置后,利用配重块平衡舱体,以使x型舵抗沉自主潜航器呈零浮力状态。
[0064]
传感器组中,惯性传感器采集的位姿信息经过解算实现整个系统的运动控制,本实施例中使用icm
‑
20948九轴运动追踪模组,具有16位ad精度;深度传感器搭载采用24位ad精度的ms5837
‑
30ba压力传感器,ms5837
‑
30ba压力传感器还需经解算板转发为115200波特率串口通讯;电导率传感器型号为ectds10
‑
iso,同时测量电导率、盐分、tds。电导率测量范围0
‑
10000us/cm,rs485接口modbus协议;水下距离传感器型号为超声波水下距离传感器;北斗/gps双模定位组件型号为atgm336h,同时兼容gps和北斗卫星精度远高于单模块,9600波特率ttl串口。当auv上浮至水面,经lora将坐标信息上传至上位机。当auv上浮至水面,经lora通讯组件将坐标信息上传至上位机;为了实现水面以上的配置和数据传输,选取远程通讯模块lora,其通过ttl
‑
rs485转换模块,连接至485
‑
1#总线,与pc上位机一对一定点传
输,在水面以上接受配置指令和航行完成上浮后的传感器数据上载。控制采集板采用采用gd32f103c8t6为控制采集板核心,其接线图如图2所示;还包括由tlp521和uln2083组成的驱动隔离升压电路,如图3所示,uln2083输出控制继电器。
[0065]
本技术的x型舵抗沉自主潜航器的4片舵叶正交布置,每片舵叶独立偏转;舵轴中心与潜艇中线面的夹角为45
°
,叶片转动引起潜艇的偏转和潜浮;
[0066]
在实际操纵过程中,本技术结合drl与自主潜航器控制,通过读取imu、深度计传感器的数据,经智能体计算4个舵叶动作,从而对x型舵x型舵潜航器进行六自由度控制。
[0067]
运动控制组件采用控制方案如下:针对x型舵抗沉自主潜航器可能执行的直线航行、变航向航行、舵卡上浮三种任务,分别采用两种drl算法:ddpg和ppo,以及三种奖励函数:反正切奖励函数、线性奖励函数、二次奖励函数进行训练,对比后选择最优的算法和奖励函数组合来执行相应任务。
[0068]
在具体实施过程中,x型舵抗沉自主潜航器包括潜航器壳体1,为便于使用,在前述基础之上,本技术还提供对于结构的改进方案,x型舵潜航器水下运动的过程受阻力影响,需要紧固舵叶并防止发生振动,因此基于舵机与x型舵潜航器壳体锁紧、壳体与舵机锁紧、舵叶与舵机锁紧的三结构锁紧设计形式,具体而言,潜航器壳体1尾端设置有四个舵叶安装孔1a,舵叶安装孔1a的前后侧设置有舵机固定孔1b,舵叶安装孔1a和舵机固定孔1b由贯通壳壁延伸至潜航器壳体1内部。大扭力防水舵机2设置于潜航器壳体1内部,且通过螺栓螺母组与舵机固定孔1b配合连接;大扭力防水舵机2的转轴对准舵叶安装孔1a中心且指向潜航器壳体1外部;大扭力防水舵机2的转轴末端设置有第一连接法兰结构2a;
[0069]
舵叶3安装于各舵叶安装孔1a中,舵叶3的舵杆末端设置有可以与第一连接法兰结构2a对接的第二连接法兰结构3a。其中第一连接法兰结构2a和第二连接法兰结构3a尺寸与舵叶安装孔1a匹配。
[0070]
艇体上表面开设方形流水孔,下表面开设长条形流水孔;艇体内部设计了隔板,在实现分舱功能的同时加强航行器纵向总体强度;对各零部件的通信及电源线路进行集中,通过水密接头对密封舱进行穿出,实现密封舱内外的水下有线通信;同时使用海水用环氧树脂灌封胶进行接口加固密封;x型舵潜航器密封舱内的活塞式压载水舱对整体重量和浮力以及扭矩产生影响。将各零部件均衡分布在密封舱,随后将活塞式压载水舱置于重心位置,利用配重块平衡舱体;
[0071]
在前述结构基础上,本技术还提供一种用于前述x型舵潜航器的舵卡抗沉方法,所述舵卡抗沉方法用于解决掉深和舵卡险情下的auv运动问题,具体而言:
[0072]
当航行器遭遇舵卡的情况,随机设置一个舵卡位置和角度,给定预设好的目标姿态,通过auv控制器输出信号,控制剩余三个舵叶结合螺旋桨实现上浮自救;
[0073]
当航行器遭遇掉深的情况,随机设置一个舵卡位置和角度,给定预设好的目标姿态,通过auv控制器输出信号,控制舵叶结合螺旋桨实现上浮自救。
[0074]
在计算过程中,x舵的4片舵叶正交布置,每片舵叶均能独立控制;舵轴中心与潜艇中线面的夹角为45
°
,叶片转动引起潜艇的偏转和潜浮;x
‑
auv在水中的运动视作刚体在流体中的空间运动,包括6个运动自由度,分别为沿艇体运动坐标系x,y,z方向的平动和转动,其运动学和动力学模型如下:
[0075][0076][0077]
前述方法便于实现挽回操作,能够快速进行适应性改造,运用于各类型尺寸和吨位的潜航器结构,相对于传统潜航设备,在复杂环境下能具有更好的控制性能。
[0078]
以下集合具体测试方案进行说明:
[0079]
测试一:当auv发生10
°
舵卡时,auv通过对剩下3个舵进行控制,实现auv以预定姿态完成上浮自救,如下图所示。在auv开始运动之前,受到水流作用,导致其初始航向和纵倾不是0
°
,但是auv在fin 4发生10
°
舵卡情况下,能够有效控制auv完成上浮自救,并保持了对姿态的控制,其测试结果如图7、图8所示:
[0080]
测试二:当auv在fin 4发生10
°
舵卡、其他舵不控制的auv运动时状态如图9、图10所示,可见auv航向一直朝一侧偏转,当航向超过临界值
‑
180
°
时,因传感器的读数规则而变为180
°
,并继续保持偏转。
[0081]
实际应用过程中,本技术基于drl控制策略,提升潜航器的稳态运行性能和突发险情时的安全性。控制拓扑设计为nano&gd32f103s双核心,隔离了数据采集和运动控制保证嵌入式的工作性能;lora&pc上位机的通讯模式,可以远程配置参数和接收采集到的数据。在nano嵌入式系统中运行基于ddpg算法的主动抗沉策略,和基于bg
‑
rrt算法的回收路径规划。相较传统x型舵潜航器,在应对随机单舵卡死、海水密度骤降多达2%(掉深)等极端工况
时也能保持0
°
横倾和15
°
纵倾可靠上浮。对于x型舵潜航器水下回收,通过bg
‑
rrt路径规划算法结合drl算法能够快随规划、安全归航。
[0082]
因此,本技术不仅是水文数据提取的工具性设计,亦可作为新一代水下航行器甚至载人潜艇的小型原理样机,拓展验证后续更多智能算法。
[0083]
最后应当说明的是,以上实施例仅用以说明本技术的技术方案,而非对本技术保护范围的限制,尽管参照较佳实施例对本技术作了详细地说明,本领域的普通技术人员应当理解,可以对本技术的技术方案进行修改或者等同替换,而不脱离本技术技术方案的实质和范围。