1.本实用新型涉及水下机器人推进器安装固定技术领域,特别涉及一种水下机器人推进器安装支架。
背景技术:
2.目前市场上现有的工作级水下机器人推进器的固定形式直接,主要是使用不锈钢材料焊接成型推进器安装支架,该类型安装支架加工复杂,制作过程需要定制焊接夹具,焊接变形量大,精度控制难度高。焊接部位容易形成应力集中,以致使用过程中在脉动推力及震动双重影响下,容易造成支架断裂,为此,提出一种水下机器人推进器安装支架。
技术实现要素:
3.有鉴于此,本实用新型实施例希望提供一种水下机器人推进器安装支架,以解决或缓解现有技术中存在的技术问题,至少提供一种有益的选择。
4.本实用新型实施例的技术方案是这样实现的:一种水下机器人推进器安装支架,包括两个固定机构:
5.两个所述固定机构均包括第一固定环、第二固定环、环形凹槽、第一六角螺纹孔和连接部;
6.所述第一固定环和第二固定环相邻的一侧紧密贴合,所述第一固定环和第二固定环相邻的一侧均开设有环形凹槽,两个所述环形凹槽相邻的一侧连通;
7.所述固定机构的上部和下部安装有支架机构;
8.所述支架机构包括上段支架、顶安装板、第二六角螺纹孔、中段支架、下段支架、菱形部、底安装板安装孔和限位孔;
9.一个所述固定机构的一个连接部安装有上段支架,一个所述固定机构的另一个连接部安装有中段支架,另一个所述固定机构的一个连接部安装于中段支架的另一侧,另一个所述固定机构的另一个连接部安装有下段支架。
10.在一些实施例中,所述第一固定环和第二固定环的外表面两侧均相互对称一体成型有连接部。
11.在一些实施例中,所述连接板的一侧开设有第一六角螺纹孔。
12.在一些实施例中,所述上段支架的顶部固定连接有顶安装板,所述下段支架的底部固定连接有底安装板。
13.在一些实施例中,所述顶安装板和底安装板的一侧均开设有安装孔。
14.在一些实施例中,所述顶安装板和底安装板的顶部另一侧均开设有水平于安装孔的限位孔。
15.在一些实施例中,所述上段支架、中段支架和下段支架的一侧均设置有菱形部。
16.在一些实施例中,所述上段支架、中段支架和下段支架的一侧均开设有与第一六角螺纹孔相适配的第二六角螺纹孔。
17.本实用新型实施例由于采用以上技术方案,其具有以下优点:
18.1、本装置采用整体铸造,再进行局部加工的形式成型,与现有类似装置对比,具有生产效率高、成本低的优点。
19.2、相比焊接的结构,可以有效的提高加工精度,省去焊接变形控制的成本支出。同时,通过固定机构和支架机构更高的精度也可以有效的保护推进器的壳体,避免造成推进器外观损伤。
20.3、相比原有的结构,通过菱形部的菱形设计有效的降低了水下机器人整体的迎流面,避免不必要的动力损耗。
21.上述概述仅仅是为了说明书的目的,并不意图以任何方式进行限制。除上述描述的示意性的方面、实施方式和特征之外,通过参考附图和以下的详细描述,本实用新型进一步的方面、实施方式和特征将会是容易明白的。
附图说明
22.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
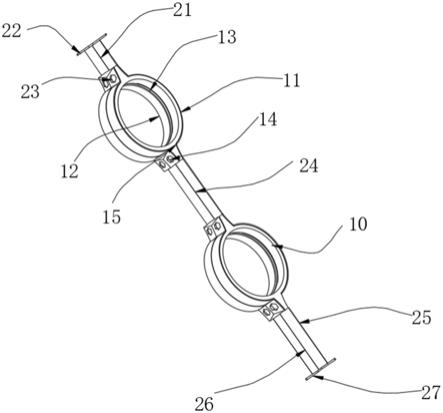
23.图1为本实用新型的结构图;
24.图2为本实用新型的第一固定环和第二固定环结构图;
25.图3为本实用新型的底安装板和下段支架结构图。
26.附图标记:10、固定机构;11、第一固定环;12、第二固定环;13、环形凹槽;14、第一六角螺纹孔;15、连接部;20、支架机构;21、上段支架;22、顶安装板;23、第二六角螺纹孔;24、中段支架;25、下段支架;26、菱形部;27、底安装板;28、安装孔;29、限位孔。
具体实施方式
27.在下文中,仅简单地描述了某些示例性实施例。正如本领域技术人员可认识到的那样,在不脱离本实用新型的精神或范围的情况下,可通过各种不同方式修改所描述的实施例。因此,附图和描述被认为本质上是示例性的而非限制性的。
28.下面结合附图对本实用新型的实施例进行详细说明。
29.如图1-3所示,本实用新型实施例提供了一种水下机器人推进器安装支架,包括两个固定机构10:
30.两个固定机构10均包括第一固定环11、第二固定环12、环形凹槽13、第一六角螺纹孔14和连接部15;
31.第一固定环11和第二固定环12相邻的一侧紧密贴合,第一固定环11和第二固定环12相邻的一侧均开设有环形凹槽13,两个环形凹槽13相邻的一侧连通;
32.固定机构10的上部和下部安装有支架机构20;
33.支架机构20包括上段支架21、顶安装板22、第二六角螺纹孔23、中段支架24、下段支架25、菱形部26、底安装板27安装孔28和限位孔29;
34.一个固定机构10的一个连接部15安装有上段支架21,一个固定机构10的另一个连
接部15安装有中段支架24,另一个固定机构10的一个连接部15安装于中段支架24的另一侧,另一个固定机构10的另一个连接部15安装有下段支架25。
35.在一个实施例中,第一固定环11和第二固定环12的外表面两侧均相互对称一体成型有连接部15,通过设置连接部15用于固定机构10和支架机构20之间的连接。
36.在一个实施例中,连接部15的一侧开设有第一六角螺纹孔14,通过第一六角螺纹孔14用于通过螺栓安装固定机构10和支架机构20。
37.在一个实施例中,上段支架21的顶部固定连接有顶安装板22,下段支架25的底部固定连接有底安装板27,顶安装板22和底安装板27的一侧为安装配合面,确保了本装置安装时的垂直度要求能满足使用要求。
38.在一个实施例中,顶安装板22和底安装板27的一侧均开设有安装孔28,安装孔28为本装置连接固定的空位,安装时需同机器人主框架上的安装空位对齐,并用螺栓锁紧,进行其配合关系为正常间隙配合,顶部及底部安装孔28需保证同轴度满足公差要求,以满足本装置可以通过旋转调整到最佳角度。
39.在一个实施例中,顶安装板22和底安装板27的顶部另一侧均开设有水平于安装孔28的限位孔29,限位孔29用于为本装置角度调整幅度,本装置角度调整的幅度由机器人主框架上的扇形槽决定。
40.在一个实施例中,上段支架21、中段支架24和下段支架25的一侧均设置有菱形部26,通过菱形部26的菱形从迎流方面分析优化,以减小迎流阻力。
41.在一个实施例中,上段支架21、中段支架24和下段支架25的一侧均开设有与第一六角螺纹孔14相适配的第二六角螺纹孔23,通过第二六角螺纹孔23与第一六角螺纹孔14的配合,通过固定螺母将固定机构10和支架机构20安装。
42.本实用新型在工作时:本装置为整体铸造成型,后续通过线切割加工为固定机构10和支架机构20两个部分,本装置安装于水下机器人主体框架上,装置上设置的两个第一固定环11和第二固定环12用于固定水下机器人推进器,通过在第一固定环11和第二固定环12相邻的一侧设置环形凹槽13,用于限制水下推进器的轴向运动,安装孔28为本装置连接固定的空位,安装时需同机器人主框架上的安装空位对齐,并用螺栓锁紧,进行其配合关系为正常间隙配合,顶部及底部安装孔28需保证同轴度满足公差要求,以满足本装置可以通过旋转调整到最佳角度,限位孔29用于为本装置角度调整幅度,本装置角度调整的幅度由机器人主框架上的扇形槽决定,通过菱形部26的菱形从迎流方面分析优化,以减小迎流阻力,本装置采用整体铸造,再进行局部加工的形式成型,与现有类似装置对比,具有生产效率高、成本低的优点。相比焊接的结构,可以有效的提高加工精度,省去焊接变形控制的成本支出。同时,更高的精度也可以有效的保护推进器的壳体,避免造成推进器外观损伤。相比原有的结构,菱形的外观设计有效的降低了水下机器人整体的迎流面,避免不必要的动力损耗。
43.以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到其各种变化或替换,这些都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应以所述权利要求的保护范围为准。