1.本实用新型涉及港口设备技术领域,特别是涉及一种自动化系靠泊装置。
背景技术:
2.随着海运事业的发展,相应的安全标准要求不断提升,码头靠泊及系泊系统的可靠性已变得越来越重要,尤其对于一些重要码头,如油船码头、液化天然气(lng/lpg)码头、化学品码头等,同时,现代码头的适应性和创新需求也对传统方案提出了挑战。如今,以云计算、大数据等为代表的新技术手段朝着规模化、协同化和智能化方向快速发展,港口与现代高新技术深度融合形成的现代航运新业态正决定港口未来发展走向。港口基础设施的智能化建设已被视为提升其核心竞争力的重要手段,也是其提升安全保障、提高作业效率和降低成本的关键所在。
3.现有的自动化靠泊和系泊系统主要通过可控支臂连接码头,由可控支臂末端的吸盘组件实现对船舶的吸附固定,可控支臂施加拉力实现船舶的靠泊和系泊并承载船舶在靠泊和系泊过程中产生的冲击,从而代替缆绳和护舷的功能,突破传统作业方式。这类设备结构复杂,需要提供船舶靠泊和系泊所需的拉力,还需要承载船舶在系泊和靠泊过程中产生的冲击,故对码头的结构荷载有较高的要求,往往需要改变现有码头的布置,对于现有码头的改造有着较高的要求,设备成本也较高,多用于新码头建设,不利于推广应用,仍有较多的码头采用传统的拖轮和船上缆车配合动作进行靠泊,将船舶用缆绳牢牢系在系缆桩上并借助护舷进行系泊,增加了人员成本,并且效率较低,还有可能因为人为失误而造成损失,安全性能差。
技术实现要素:
4.本实用新型的目的是提供一种自动化系靠泊装置,以解决上述现有技术存在的问题,有助于提高系靠泊作业的自动化水平,减轻劳动强度,提高工作效率,增强作业的安全性,结构简单,成本较低,便于应用和推广。
5.为实现上述目的,本实用新型提供了如下方案:
6.本实用新型提供了一种自动化系靠泊装置,包括伸缩装置、吸附单元、系船缆、旋转装置和控制柜,所述伸缩装置能够用于与码头固定连接,所述伸缩装置能够沿水平方向伸缩,所述吸附单元与所述系船缆的一端固定连接,所述旋转装置用于释放或收紧系船缆,所述旋转装置能够用于与码头固定连接,所述控制柜与所述伸缩装置、所述吸附单元和所述旋转装置通讯连接,所述控制柜用于控制所述伸缩装置与所述系船缆同步伸缩且控制所述吸附单元开启或关闭。
7.优选的,所述伸缩装置的自由端设有传动装置,所述传动装置设有连接缆线,所述连接缆线的自由端与所述吸附单元固定连接,所述传动装置用于调节所述连接缆线的使用长度。
8.优选的,所述旋转装置的底部设有基座,所述基座用于与所述码头固定连接,所述
控制柜的底部与所述基座固定连接,所述控制柜与所述伸缩装置固定连接。
9.优选的,所述伸缩装置包括第一伸缩臂和第二伸缩臂,所述第一伸缩臂的下端与所述控制柜固定连接,所述第一伸缩臂与所述基座垂直,所述第一伸缩臂能够在竖直方向升降,所述第一伸缩臂的上端与所述第二伸缩臂的一端连接且相互垂直,所述第二伸缩臂的另一端的端部设有传动装置,所述第二伸缩臂能够在水平方向伸缩。
10.优选的,所述第二伸缩臂与所述第一伸缩臂形成绕竖直轴线的转动连接。
11.优选的,所述旋转装置上设有拉力监测装置,所述拉力监测装置用于监测所述系船缆的拉力,所述拉力监测装置与所述控制柜通讯连接。
12.优选的,所述伸缩装置为悬臂吊,所述旋转装置为绞车。
13.优选的,还包括遥控终端,所述控制柜上设有操作面板,所述遥控终端与所述操作面板用于控制所述伸缩装置运动、所述旋转装置收紧或释放系船缆、所述传动装置调整所述连接缆线的使用长度及所述吸附单元开启与关闭。
14.优选的,所述吸附单元为真空吸盘或电磁吸盘。
15.优选的,所述连接缆线与所述吸附单元通过锚链卸扣固定连接,所述传动装置为电动葫芦。
16.本实用新型相对于现有技术取得了以下技术效果:
17.本实用新型提供的自动化系靠泊装置采用伸缩装置和吸附单元部分或全部替代了现有的由船上员工向岸边抛缆和码头上工人带缆的操作,增强作业的安全性,通过控制柜控制伸缩装置和系船缆同步伸缩且控制吸附单元开启或关闭,有助于提高系靠泊作业的自动化水平,减轻劳动强度,提高工作效率;采用旋转装置和系船缆为船舶提供拉力,不需要伸缩装置为船舶的靠泊提供拉力,结构简单,成本较低,便于应用和推广。
附图说明
18.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
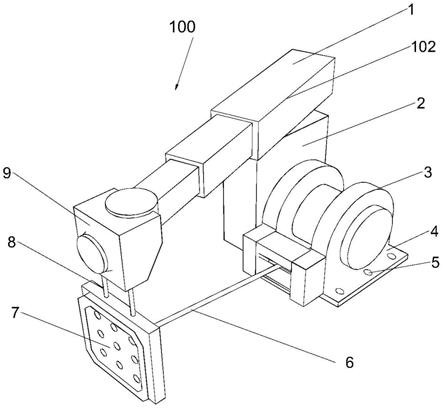
19.图1为本实用新型提供的自动化系靠泊装置的结构示意图;
20.图2为本实用新型提供的自动化系靠泊装置的正视图;
21.图中:100
‑
自动化系靠泊装置,1
‑
伸缩装置,101
‑
第一伸缩臂,102
‑
第二伸缩臂,2
‑
控制柜,3
‑
旋转装置,4
‑
基座,5
‑
安装孔,6
‑
系船缆,7
‑
吸附单元,8
‑
连接缆线,9
‑
传动装置,10
‑
码头,11
‑
遥控终端,12
‑
操作面板。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
23.本实用新型的目的是提供一种自动化系靠泊装置,以解决现有技术存在的问题,
有助于提高系靠泊作业的自动化水平,减轻劳动强度,提高工作效率,增强作业的安全性,结构简单,成本较低,便于应用和推广。
24.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本实用新型作进一步详细的说明。
25.如图1
‑
2所示,本实用新型提供了一种自动化系靠泊装置100,包括伸缩装置1、吸附单元7、系船缆6、旋转装置3和控制柜2,伸缩装置1能够用于与码头10固定连接,优选为安装在码头10上系缆桩所在位置,伸缩装置1能够沿水平方向伸缩,吸附单元7与系船缆6的一端固定连接,旋转装置3用于释放或收紧系船缆6,伸缩装置1能够与系船缆6同步伸缩,旋转装置3能够用于与码头10固定连接,优选为安装在码头10上系缆桩所在位置,控制柜2与伸缩装置1、吸附单元7和旋转装置3通讯连接,控制柜2用于控制伸缩装置1与系船缆6同步伸缩且控制吸附单元7开启或关闭。当船舶抵近泊位进行靠泊作业时,伸缩装置1带动吸附单元7伸出且吸附单元7在竖直方向进行升降至靠近船身侧舷的合适位置,由吸附单元7对船舷进行稳定的吸附,通过旋转装置3收紧系船缆6,将吸附单元7拉近至码头10处直至船舶贴附在护舷上,系船缆6收紧的过程中伸缩装置1同步收缩,完成船舶的靠泊作业,最后在系船缆6的拉力作用下,实现了船舶的稳定系泊。本实用新型提供的自动化系靠泊装置100采用伸缩装置1和吸附单元7部分或全部替代了现有的由船上员工向岸边抛缆和码头上工人带缆的操作,增强作业的安全性,通过控制柜2控制伸缩装置1与系船缆6同步伸缩且控制吸附单元7开启或关闭,有助于提高系靠泊作业的自动化水平,减轻劳动强度,提高工作效率;采用旋转装置3和系船缆6为船舶提供拉力,结构较简单,不需要伸缩装置1为船舶的靠泊提供拉力,可选用承载力较低的伸缩装置,其成本较低,便于应用和推广。
26.伸缩装置1的自由端设有传动装置9,传动装置9设有连接缆线8,连接缆线8优选为高分子缆绳,连接缆线8的自由端与吸附单元7固定连接,传动装置9用于调节连接缆线8的使用长度。连接缆线8能够使吸附单元7相对于伸缩装置1产生一定量的偏移,有效地避免了由于伸缩装置1与系船缆6运动不同步而产生吸附单元7或伸缩装置1损坏的现象的发生。
27.旋转装置3的底部设有基座4,基座4上设有多个安装孔5,基座4与码头10通过多个安装孔5固定连接,控制柜2的底部与基座4固定连接,控制柜2与伸缩装置1固定连接,基座4、控制柜2和旋转装置3优选为一体成型,便于安装。
28.伸缩装置1包括第一伸缩臂101和第二伸缩臂102,第一伸缩臂101的一端与控制柜2固定连接,第一伸缩臂101与基座4垂直,第一伸缩臂101能够在竖直方向升降,第一伸缩臂101的另一端与第二伸缩臂102的一端连接且相互垂直,第二伸缩臂102的另一端的端部设有传动装置9,第二伸缩臂102能够在水平方向伸缩。通过第一伸缩臂101升降和第二伸缩臂102收缩,保证吸附单元7能够适应不同船舶的高度,完成吸附。
29.第二伸缩臂102与第一伸缩臂101形成绕竖直轴线的转动连接,当船舶与码头10呈一定角度时,通过第二伸缩臂102旋转以完成吸附单元7对船舶的吸附。
30.旋转装置3上设有拉力监测装置,拉力监测装置用于监测系船缆6的拉力,拉力监测装置与控制柜2通讯连接,通过拉力监测装置实时监测系船缆6的受力情况,便于第一绞车根据船舶载度、吃水变化、风浪流动或潮汐水位变化等条件的改变实时地释放或收紧系船缆6,使船舶系缆力保持在合理的范围,且能够在超出合理范围时通过控制柜2进行报警,实现了自动化系泊,降低了人工调缆的工作强度,提升了作业效率,增强了系泊的安全性。
31.伸缩装置1为悬臂吊,悬臂吊内置液压动力以实现自身的伸缩、升降及旋转。旋转装置3优选为绞车。
32.本实用新型提供的自动化系靠泊装置100还包括遥控终端11,控制柜2上设有操作面板12,遥控终端11与操作面板12用于控制伸缩装置1运动、旋转装置3收紧或释系船缆6、传动装置9调整连接缆线8的使用长度及吸附单元7开启与关闭,其中,遥控终端11与操作面板12控制伸缩装置1运动具体为根据吸附单元7与船舶的位置关系,控制伸缩装置1伸缩、升降或旋转。现场作业时,可以根据现场视频采集设备或拉力监测装置采集的数据确定吸附单元7与船舶的位置关系,当吸附单元7与船舶贴合时,通过遥控终端11或操作面板12控制吸附单元7开启,完成对船舶的吸附。
33.吸附单元7为真空吸盘或电磁吸盘。
34.连接缆线8与吸附单元7通过锚链卸扣固定连接,传动装置9优选为电动葫芦。
35.本实用新型提供的自动化系靠泊装置100的数量能够根据需求设置,待各自动化系靠泊装置100通过各自控制调节均实现了受力均匀且接近系统预设的系缆力范围后,即完成船舶靠泊和系泊的整个作业过程。
36.本实用新型中应用了具体个例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的方法及其核心思想;同时,对于本领域的一般技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处。综上,本说明书内容不应理解为对本实用新型的限制。