1.本发明涉及智能控制领域,尤其是一种用于游船的避障系统,可安装于游船中,扫描船头和/或船尾的障碍物信息。
背景技术:
2.随着人工智能技术的不断发展,越来越多的智能辅控装备成为研究热点;传统游船依靠人力驾控,很少设置避障系统,不能实现自动避障。
3.在采用避障和避碰技术的智能船舶中,主要采用设备包括激光雷达、海事雷达、摄像头或毫米波雷达等;其中激光雷达精度高,但是价格昂贵,穿透力差,在雨雾天气下,无法正常使用,难以推广至低成本的中小型游船项目中;摄像头在雨雾或强光环境中成像效果不稳定,尤其晚上效果差,不能全天候有效工作,难以满足中小型游船的避障需求;海事雷达一般而言体型较大,探测距离远,价格昂贵,适合安装于7米以上的公务船艇上,也不适合用于中小型游船;毫米波雷达已经在汽车避碰等领域中广泛使用,成本低、能在雨、雪、雾、强光等不同环境下全天候工作,探测距离常在几米到200m范围内,能满足低速游艇避碰的探测需求。
4.但是在毫米波雷达的使用过程中,由于雷达的上下波束发射角较小,大约14度左右,因此在航行过程中很容易丢失探测目标,产生探测盲区或误报;尽管反复调整毫米波雷达的安装高度和安装角度,可使游船进一步适应所面临的航行水域不同场景,但是由于中小型游船的整船高度有限,单个毫米波雷达探测效果不佳,不能实质性解决探测盲区或误报的问题;尤其是游船在水体中前后纵摇或艏摇时,毫米波雷达的探测区域由固定探测转变为扫描式探测,不利于障碍物连续跟踪,也不利于过滤水浪干扰信息;因此针对中小型游艇的特殊使用场景和成本特性,需采用一种全新的系统方案来消除游船纵摇或艏摇对毫米波雷达的影响。
5.鉴于此,克服上述现有技术所存在的缺陷是本技术领域亟待解决的问题。
技术实现要素:
6.本发明需要解决的技术问题是:游船在水中摇晃时,导致避障系统出现扫描盲区,丢失扫描信息,难以持续避障。
7.本发明通过如下技术方案达到上述目的:提供一种用于游船的避障系统,包括控制器、毫米波雷达、电源系统和安装架;所述控制器安装于游船的船舱中,可连接并监控毫米波雷达和电源系统的运行工况;所述安装架设置于游船的船头和/或船尾,用于挂载毫米波雷达;所述毫米波雷达安装于安装架上,为控制器提供障碍物扫描信息;所述电源系统安装于游船的船舱中,为控制器和毫米波雷达提供电源,具体的,电源系统为游船自带的蓄电池及其对应的充电系统,也可单独设置专用蓄电池。
8.进一步的,所述安装架包括定位座、支撑座和连接器;
所述定位座竖直地安装于游船的船头和/或船尾,即定位座与水面垂直,可根据毫米波雷达对角度和高度的安装需求,适当调整定位座的安装位置;所述连接器一端固定在定位座上,另一端连接在支撑座的底端面,从而将支撑座挂载到连接器上;所述支撑座的顶端面对称地设置有多个毫米波雷达,拓展避障系统的扫描能力;多个毫米波雷达间扫描角度叠加或互补,为控制器提供多重或互补的扫描信息,可降低避障系统的探测误差,尤其可减少漏测。
9.进一步的,所述支撑座的顶端面对称地设置多个相交的长方形面板,对应相交处为向外凸出,相邻长方形面板之间夹角与单个毫米波雷达的上下波束发射角相对应,当毫米波雷达的上下波束发射角为a度时,则相邻长方形面板之间夹角范围为大于等于b度且小于180度,其中a+b=180;每个长方形面板上水平设置一个毫米波雷达,即长方形面板的数量与毫米波雷达的数量相等,相邻毫米波雷达间呈外八字排布,相邻毫米波雷达中上方毫米波雷达的发射角的下边沿与下方毫米波雷达的发射角的上边沿相切或重叠,形成更大的组合发射角;具体的,当游船在航行过程中产生船头高船尾低的纵摇姿态变化时,下方毫米波雷达向上抬起补偿游船姿态前高后低的影响,对前方障碍物进行持续探测;当游船在航行过程中产生船头低船尾高的纵摇姿态变化时,上方毫米波雷达向下压补偿游船姿态前低后高的影响,对前方障碍物进行持续探测。
10.进一步的,所述连接器包括多个弹簧;所述弹簧均匀分布于支撑座和定位座之间;具体为,所述弹簧被设置在球型座和定位座对应的顶角上;初始状态下,所述弹簧处于自然伸长状态,当游船在航行过程中产生周期性纵摇或艏摇姿态变化时,不同位置弹簧提供不同的拉力或推力,可极大减缓球型座与定位座间同步地刚性震动,提高毫米波雷达扫描稳定性。
11.进一步的,所述连接器还包括配套设置的球型销和球型座;所述球型销一端为圆柱体,可固定在定位座上,另一端设置有球型头;所述球型座一端为圆柱体,可固定在支撑座的底端面,另一端设置有球形凹槽;所述球形头的直径与球形凹槽的直径相同,球型销的球型头可配套地插入球型座的球形凹槽中,使球型座可全向旋转地挂载在定位座上,从而固定球型座与定位座连接处的纵向距离,当游船在航行过程中产生周期性纵摇姿态变化或艏摇姿态变化时,球型座可围绕球形头柔性旋转,极大减缓球型座与定位座间同步地刚性摆动,提高毫米波雷达扫描稳定性。
12.进一步的,所述支撑座设置为空心盒体,便于埋线,并在支撑座、球型座、球型销和定位座上对应位置设置通线孔,便于将毫米波雷达的通信线从通线孔中牵引到控制器上,将毫米波雷达的通电线从通线孔中牵引到电源系统上。
13.进一步的,所述支撑座底部设置一个配重块;当游船在航行过程中产生周期性纵摇姿态变化时,在配重块的作用下,支撑座可围绕球形头柔性旋转至竖直状态。
14.本发明相比现有技术的优点在于:本方案提供了一种低成本的,基于毫米波雷达的游艇避碰解决方案,尤其通过在支撑座上对称地设置多个毫米波雷达,拓展避障系统的扫描能力;多个毫米波雷达间扫描角度叠加或互补,为控制器提供多重或互补的扫描信息,可降低避障系统的探测误差,减少漏测,降低游船在航行过程中周期性纵摇或艏摇对避障探测的影响。
附图说明
15.为了更清楚地说明本发明实施例的技术方案,下面将对本发明实施例中所需要使用的附图作简单地介绍。显而易见地,下面所描述的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
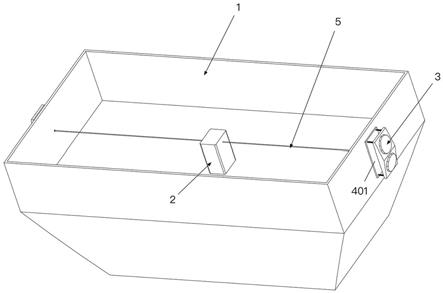
16.图1为实施例中游船搭载避障系统后整体立体图。
17.图2为实施例中安装架搭载毫米波雷达后俯视立体图。
18.图3为实施例中定位座孤立时的立体图。
19.图4为实施例中安装架搭载毫米波雷达后仰视立体图。
20.图5为实施例中支撑座的仰视立体图。
21.图6为实施例中支撑座的俯视立体图。
22.图7为实施例中球形销的仰视立体图。
23.图8为实施例中球形销的俯视立体图。
24.图9为实施例中弹簧的立体图。
25.图10为实施例中支撑座搭载配重块后俯视立体图。
26.图中:1-游船;2-控制器;3-毫米波雷达;4-安装架;5-通信线;6-配重块;401-定位座;402-支撑座;403-弹簧;404-球型销;405-球型头;406-球型座;407-球型凹槽;408-通线孔。
具体实施方式
27.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
28.在本发明的描述中,术语“内”、“外”、“纵向”、“横向”、“上”、“下”、“顶”、“底”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明而不是要求本发明必须以特定的方位构造和操作,因此不应当理解为对本发明的限制。
29.此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。下面就参考附图和实施例结合来详细说明本发明。
30.实施例,如图1-9所示,提供一种用于游船1的避障系统,包括控制器2、毫米波雷达3、电源系统和安装架4;其中控制器2为以sim32f系列cpu处理器为核心组成的控制箱,毫米波雷达3的型号为sp70c防碰撞雷达,对应的上下波束发射角为14度;所述控制器2安装于游船1的船舱中,连接并监控毫米波雷达3和电源系统的运行工况;所述安装架4设置于游船1的船头和船尾,用于挂载毫米波雷达3;所述毫米波雷达3安装于安装架4上,为控制器2提供障碍物扫描信息;所述电源系统为游船1自带的蓄电池及其对应的充电系统,安装于游船1的船舱中,为控制器2和毫米波雷达3提供电源。
31.本实施例中,所述安装架4包括定位座401、支撑座402和连接器;所述定位座401长度为36cm、宽度为20cm,竖直地安装于游船1的船头和船尾;即定位座401与水面垂直,用户可根据毫米波雷达3对角度和高度的安装需求,适当调整定位座401的
安装位置,尤其应遵守其对安装高度的要求:离水面50-150cm间;所述连接器一端固定在定位座401上,另一端连接在支撑座402的底端面,从而将支撑座402挂载到连接器上;所述支撑座402长度为36cm,底端面宽度为20cm,可完整盖合在定位座401上;所述支撑座402的顶端面对称地设置有两个毫米波雷达3,拓展避障系统的扫描能力;两个毫米波雷达3间扫描角度叠加或互补,为控制器2提供多重或互补的扫描信息,可降低避障系统的探测误差,尤其可减少漏测。
32.本实施例中,所述支撑座402的顶端面对称地设置两个相交的长方形面板,对应相交处为向外凸出,此两个长方形面板之间夹角与单个毫米波雷达3的上下波束发射角相对应,即毫米波雷达3的上下波束发射角为14度,两个长方形面板之间夹角设置为166度;每个长方形面板上水平设置一个毫米波雷达3,此两个毫米波雷达3间呈外八字排布,上方毫米波雷达3的发射角的下边沿与下方毫米波雷达3的发射角的上边沿相切,形成更大的组合发射角,组合发射角的值为28度;具体的,当游船1在航行过程中产生船头高船尾低的纵摇姿态变化时,下方毫米波雷达3向上抬起补偿游船1姿态前高后低的影响,对前方障碍物进行持续探测;当游船1在航行过程中产生船头低船尾高的纵摇姿态变化时,上方毫米波雷达3向下压补偿游船1姿态前低后高的影响,对前方障碍物进行持续探测。
33.本实施例中,所述连接器包括四个弹簧403,每个弹簧403长度为7cm;所述弹簧403均匀分布于支撑座402和定位座401之间;具体为,所述弹簧403被设置在球型座406和定位座401对应的顶角上;初始状态下,所述弹簧403处于自然伸长状态,当游船1在航行过程中产生周期性纵摇或艏摇姿态变化时,不同位置弹簧403提供不同的拉力或推力,极大减缓球型座406与定位座401间同步地刚性震动,提高毫米波雷达3扫描稳定性。
34.本实施例中,所述连接器还包括配套设置的球型销404和球型座406;所述球型销404一端为圆柱体,被固定在定位座401上,另一端设置有球型头405;所述球型座406一端为圆柱体,被固定在支撑座402的底端面,另一端设置有球形凹槽;所述球形头的直径与球形凹槽的直径都为3cm,球型销404的球型头405配套地插入球型座406的球形凹槽中,使球型座406可全向旋转地挂载在定位座401上,从而固定球型座406与定位座401连接处的纵向距离,当游船1在航行过程中产生周期性纵摇姿态变化或艏摇姿态变化时,球型座406可围绕球形头柔性旋转,极大减缓球型座406与定位座401间同步地刚性摆动,提高毫米波雷达3扫描稳定性。
35.本实施例中,所述支撑座402设置为空心盒体,便于埋线,并在支撑座402、球型座406、球型销404和定位座401上对应位置设置通线孔408,便于将毫米波雷达3的通信线5从通线孔408中牵引到控制器2上,将毫米波雷达3的通电线从通线孔408中牵引到电源系统上。
36.在上述实施例的基础上,如图10所示,所述支撑座402底部设置一个配重块6,长度为15cm,高度为5cm,重量为1kg;当游船在航行过程中产生周期性纵摇姿态变化时,在配重块(6)的作用下,支撑座(402)可围绕球形头405柔性旋转至竖直状态。
37.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。