1.本发明涉及具备输送介质的输送辊和驱动输送辊的电机的介质输送装置、记录装置以及介质输送装置的控制方法。
背景技术:
2.例如,专利文献1公开了一种记录装置(图像写入装置),其具备具有输送记录介质的输送辊和驱动输送辊的电机的介质输送装置,对由输送辊输送的记录介质进行记录。记录装置具备对电机的电流值和阈值进行比较并判定记录介质的输送状态的判定部。判定部基于电机的电流值超过阈值的时间来检测卡纸。当发生卡纸时,电机被强制性地停止。例如,在用于卡纸的检测的阈值中设定与假定的电机的最大负荷(假定最大负荷)相应的值。
3.专利文献1:特开平4-243761号公报
4.但是,与假定最大负荷相应的阈值(限制值)例如被设定为与根据记录装置的累计使用量而变化的最大负荷的平均值相应的值。在记录装置刚开箱后等开始使用的初始阶段,构成动力传递机构的齿轮等部件的滑动阻力或输送辊的滑动阻力比较小,施加于电机的负荷比较小。因此,有如下问题:在对传递电机的动力的动力传递机构施加了意料外的负荷的情况下,即使电机的电流值没有超过阈值,也会对构成动力传递机构的齿轮等部件施加过大的转矩且部件有可能破损。另外,记录装置所具备的介质输送装置有的具备由电机的动力驱动的输送辊以外的可动构件。在这种情况下有如下问题:当不限于输送辊的可动构件被驱动时,即使意料外的负荷施加于电机时电机的电流值没有超过阈值,也会对构成动力传递机构的部件施加过大的转矩,同样地构成动力传递机构的齿轮等部件有可能破损。
技术实现要素:
5.解决上述问题的介质输送装置是输送记录介质的介质输送装置,具备:供送辊,其供送所述记录介质;输送辊,其输送被供送的所述记录介质;电机,其是所述供送辊和/或所述输送辊的驱动源;动力传递机构,其将所述电机的动力传递到所述供送辊和输送辊中的至少一方;以及控制部,其对所述电机进行电流控制,所述控制部将所述电机的驱动中的电流值测定为测定电流值,对该测定电流值加上预定的偏移值,从而设定提供给所述电机的电流的限制值。
6.解决上述问题的介质输送装置是输送记录介质的介质输送装置,具备:供送辊,其供送所述记录介质;输送辊,其输送被供送的所述记录介质;所述输送辊以外的可动构件;电机;动力传递机构,其将所述电机的动力传递到所述可动构件;以及控制部,其对所述电机进行电流控制,所述控制部将所述电机的驱动中的电流值测定为测定电流值,对该测定电流值加上预定的偏移值,从而设定提供给所述电机的电流的限制值。
7.解决上述问题的记录装置具备所述介质输送装置和对所述记录介质进行记录的记录头。
8.在解决上述问题的介质输送装置的控制方法中,所述介质输送装置具备:供送辊,其供送记录介质;输送辊,其输送被供送的所述记录介质;电机,其是所述供送辊和/或所述输送辊的驱动源;动力传递机构,其将所述电机的动力传递到所述供送辊和所述输送辊中的至少一方;以及控制部,其对所述电机进行驱动控制,所述介质输送装置的控制方法具有如下步骤:通过所述控制部将所述电机的驱动中的电流值测定为测定电流值;以及所述控制部对所述测定电流值加上预定的偏移值,从而设定提供给所述电机的电流的限制值。
9.在解决上述问题的介质输送装置的控制方法中,所述介质输送装置具备:供送辊,其供送记录介质;输送辊,其输送被供送的所述记录介质;所述输送辊以外的可动构件;电机;动力传递机构,其将所述电机的动力传递到所述可动构件;以及控制部,其对所述电机进行驱动控制,所述介质输送装置的控制方法具有如下步骤:通过所述控制部将所述电机的驱动中的电流值测定为测定电流值;以及所述控制部对所述测定电流值加上预定的偏移值,从而设定提供给所述电机的电流的限制值。
附图说明
10.图1是一实施方式的记录装置的立体图。
11.图2是示出处于将盖打开的状态的记录装置的立体图。
12.图3是示出处于将箱体拆下的状态的记录装置的立体图。
13.图4是示出处于将箱体拆下的状态的记录装置的俯视图。
14.图5是示出处于将箱体拆下的状态的记录装置的俯视图。
15.图6是示出介质输送装置的立体图。
16.图7是示出介质输送装置的立体图。
17.图8是示出介质输送装置的一部分的立体图。
18.图9是示出介质输送装置的一部分的主视图。
19.图10是示出介质输送装置的一部分的立体图。
20.图11是示出介质输送装置的一部分的主视图。
21.图12是示出介质输送装置的一部分的立体图。
22.图13是示出介质输送装置的一部分的立体图。
23.图14是示出锁定构件和滑架的正截面图。
24.图15是示出第一切换部和滑架的部分俯视图。
25.图16是示出记录装置的电构成的框图。
26.图17是说明电机电流的限制值的设定方法的坐标图。
27.图18是说明电机电流的限制值的设定方法的坐标图。
28.图19是示出供送期间和输送期间中设定的限制值的坐标图。
29.图20是示出恢复操作时设定的限制值的坐标图。
30.图21是示出限制值设定程序的流程图。
31.图22是示出记录处理程序的流程图。
32.图23是示出恢复处理程序的流程图。
33.图24是示出变更例中的供送期间和输送期间中设定的限制值的坐标图。
34.附图标记说明
35.11
…
记录装置、12
…
装置主体、14
…
供送盖、13
…
盖、15
…
操作面板、16
…
电源按钮、17
…
液体供给源、18
…
收纳部、18a
…
供给盖、19
…
窗部、20
…
供送部、21
…
第一供送部、211
…
可动构件和作为供送辊的一例的拾取辊、22
…
第二供送部、22a
…
作为载置部的一例的供送托盘、22b
…
边缘引导件、221
…
供送用辊、23
…
记录部、24
…
滑架、25
…
记录头、26
…
排出盖、27
…
作为载置部的一例的盒、28
…
介质检测器、30
…
主框架、30a
…
导轨、31
…
移动机构、32
…
滑架电机、33
…
定时带、34
…
线性编码器、35
…
介质支撑构件、35a
…
支撑面、40
…
输送部、41
…
输送辊对、42
…
排出辊对、43
…
作为输送辊的一例的输送驱动辊、44
…
输送从动辊、45
…
排出驱动辊、46
…
输送电机、47
…
动力传递机构、48
…
带、49
…
旋转编码器(编码器)、49a
…
旋转标度、49b
…
光学传感器、50
…
齿轮组、51
…
齿轮、52
…
齿轮、53
…
齿轮、54
…
输入齿轮、60
…
维护装置、61
…
帽、62
…
刮片、63
…
泵、65
…
维护机构、66
…
齿轮、67
…
齿轮组、68
…
锁定构件、69
…
废液罐、70
…
第一供送机构、71
…
摆动轴、72
…
摆动构件、73
…
旋转轴、74
…
齿轮列、75
…
齿轮、76
…
齿轮组、80
…
第二供送机构、85
…
第二切换部、90
…
作为切换部的一例的第一切换部、91
…
滑块、92
…
弹性构件、93
…
抵接部、94
…
卡合部、95
…
凸轮构件、96
…
切换齿轮、100
…
控制部、101
…
第一计数器、102
…
第二计数器、103
…
运算部、104
…
电机控制部、105
…
电机驱动器、106
…
非易失性存储器、107
…
dac、200
…
介质输送装置、x
…
扫描方向(宽度方向)、y
…
输送方向、y0
…
输送方向、z1
…
铅垂方向、m
…
记录介质(介质)、hp
…
作为待机位置的一例的起始位置、ah
…
起始相反位置、ilim1
…
第一限制值、ilim2、ilim21、ilim3
…
第二限制值、imea
…
测定电流值(负荷电流)、iof
…
偏移值、st
…
供送期间、ft
…
输送期间、lt
…
滑架锁定解除动作期间。
具体实施方式
36.以下,参照附图说明记录装置的一实施方式。在图1中,记录装置11设为放置于水平面上,将相互正交的3个假想轴设为x轴、y轴以及z轴。x轴是与后述的记录头的扫描方向平行的假想轴,y轴是与记录时的介质的输送方向平行的假想轴。另外,z轴是与铅垂方向z1平行的假想轴。将与x轴平行的方向中的记录头往复移动的两个方向称为扫描方向x。另外,扫描方向x是与被输送的记录介质的宽度方向平行的方向,因此也称为宽度方向x。与y轴平行的一个方向是指记录头对记录介质进行记录的记录位置处的介质的输送方向。此外,也可以将在y轴上记录装置11中的后述的操作面板15所配置的一面侧称为前或前表面,将与前相反的一侧称为后或背面。另外,介质m被输送的输送路径并非在整个区域中与y轴平行,输送方向y0根据输送路径上的介质m的位置而变化。
37.记录装置的构成
38.图1所示的记录装置11是串行记录方式的喷墨打印机。如图1所示,记录装置11具备装置主体12和能开闭地设置于装置主体12的上部的盖13。记录装置11作为整体呈大致长方体状。
39.记录装置11在前表面具备操作面板15。操作面板15具有包含对记录装置11提供各种指示时被操作的操作按钮等的操作部和显示各种菜单及记录装置11的动作状况等的显示部(均省略图示)。另外,在装置主体12的前表面设置有电源操作部16。此外,还能由触摸面板构成显示部,以通过触摸面板操作的操作功能来构成操作部。
40.另外,在装置主体12的前部右侧设置有收纳至少1个(在本实施方式中为6个)液体
供给源17(参照图2)的收纳部18。收纳部18具有与各液体供给源17对应的至少1个(在本实施方式中为6个)窗部19。窗部19由透明或半透明的树脂制成,用户能通过窗部19从外部目视确认收纳于液体供给源17中的液体的液位。
41.另外,在记录装置11的后部上侧设置有供送盖14且供送盖14能开闭。供送盖14以后端为中心转动从而被开闭。在装置主体12中,在位于图1所示的关闭位置的供送盖14的内侧收纳有供送部20。供送部20供送纸张等介质m。供送部20具有作为用于载置介质m的载置部的一例的供送托盘22a(参照图2)。用户将记录介质m载置于供送盖14位于打开位置时露出的供送托盘22a。
42.在装置主体12内收纳有用于对被从供送托盘22a供送的记录介质m(以下也简称为“介质m”。)进行记录的记录部23。记录部23例如是串行记录方式。记录装置11例如是串行打印机。串行记录方式的记录部23具备:滑架24,其能在扫描方向x上往复移动;以及记录头25,其设置于滑架24。记录头25的与沿着输送路径被输送的介质m对置的面成为多个喷嘴(省略图示)开口的喷嘴面。液体供给源17与记录部23通过液体供给管17a(参照图5)被连接,从液体供给源17通过液体供给管17a向记录头25供给液体。记录头25一边与滑架24一起移动,一边从多个喷嘴向介质m喷出液体。
43.另外,在记录装置11的前表面下部设置有排出盖26且排出盖26能开闭。排出盖26以下端为中心转动。在装置主体12中在位于图1所示的关闭位置的排出盖26的里面,收纳有为了支承记录后的介质m而使用的堆叠器(省略图示)和载置多个记录前的介质m的盒27(参照图2)。
44.记录装置11具备掌管各种控制的控制部100。控制部100掌管滑架24和记录头25的控制、介质m的输送控制、操作面板15的显示控制、电源控制等。
45.接着,参照图2、图3对记录装置11的内部的详细构成进行说明。
46.如图2所示,在装置主体12内,主框架30在宽度方向x上延伸配置。主框架30具有引导滑架24的一对导轨30a(也参照图3)。一对导轨30a沿着扫描方向相互平行地延伸。滑架24由一对导轨30a在铅垂方向z1上以两个部位被支撑为能在扫描方向x上移动。滑架24通过被一对导轨30a引导从而在扫描方向上往复移动。在主框架30与滑架24之间设置有使滑架24在扫描方向x上移动的移动机构31。移动机构31例如是带驱动方式,具备作为滑架24的驱动源的滑架电机32和沿着扫描方向x张设的环状的定时带33。滑架24固定于定时带33的一部分。滑架电机32正转反转从而滑架24经由定时带33在扫描方向x上往复移动。此外,移动机构31也可以是带驱动方式以外的公知的线性驱动方式。
47.另外,在主框架30设置有沿着扫描方向延伸的线性编码器34。线性编码器34具备沿着扫描方向x延伸的线性标度和安装于滑架24的光学传感器(省略图示)。光学传感器检测线性标度的透光标度,输出包含与滑架24的移动量成比例的数量的脉冲的检测脉冲信号。
48.在收纳部18设置有将其上部开闭的供给盖18a。在本例中,液体供给源17是收纳液体的罐。用户当有通过窗部19看到余量变少的液体供给源17时,将盖13和供给盖18a打开,从液体瓶向液体供给源17的注入口(省略图示)注入液体。此外,液体供给源17不限于用户从液体瓶补充液体的液体补充方式的罐,也可以是收纳液体的液体袋(例如油墨袋)或液体盒(例如油墨盒)。另外,液体供给源17是设置于装置主体12的非滑架装载型,但也可以是搭
载于滑架24的滑架装载型。
49.如图3所示,供送部20具备:第一供送部21,其供送堆叠于盒27的介质m;以及第二供送部22,其供送载置于供送托盘22a的介质m。盒27能相对于在将装置主体12的盖26打开的前表面开口的凹状的被插接部向与y轴平行的方向插拔。用户将盒27从装置主体12向输送方向y抽出来进行介质m的组合或者介质m的更换等。用户将放置有介质m的盒27压入被插接部内。
50.供送托盘22a设置有一对边缘引导件22b。载置于供送托盘22a的介质m用一对边缘引导件22b夹着,从而在宽度方向x上被定位。供送部20将载置于供送托盘22a的介质m沿着输送路径向输送方向y0供送。本实施方式的记录装置11具备盒27和供送托盘22a作为载置介质m的多个载置部。另外,记录装置11具备分别供送载置于多个载置部的介质m的多个供送部21、22。此外,用户也可以设置将介质m逐一载置并使用的手动托盘或者在盒27的下段增设第二个以后的1个或者多个盒作为载置部。载置部是供送托盘22a、盒27、手动托盘、第二个以后的盒中的至少2个,供送部具备分别供送至少载置于2个载置部的介质m的至少2个供送部。
51.如图3、图4所示,记录装置11具备将被从供送部20供送的介质m向输送方向y0输送的输送部40。输送部40具备输送辊对41和排出辊对42。输送辊对41和排出辊对42在输送方向y0上按该顺序配置。
52.另外,记录装置11具备对记录部23所记录的部分的介质m进行支撑的介质支撑构件35。介质支撑构件35是在宽度方向x上延伸的长条状的构件,具有能支撑最大宽度的介质m的宽度方向整个区域的长度。记录部23对被输送的介质m中的被介质支撑构件35支撑的部分进行记录。
53.记录装置11交替地反复进行滑架24移动1次且记录头25进行1进程量的记录的记录动作和将介质m输送到下一记录位置为止的输送动作,从而对介质m记录文字或者图像。此外,记录部23也可以是行式记录方式。行式记录方式的记录部23具备记录头25,所述记录头25由具有能向最大宽度的介质的整个宽度区域一齐喷出液体的多个喷嘴的行式头形成。将介质m的整个宽度区域作为喷出对象从由行式头形成的记录头25的喷嘴对以恒恒定速度度被输送的介质m喷出液体,因此,可实现图像等的高速记录。
54.图3中用双点划线示出的滑架24位于作为不进行记录时的待机位置的起始位置hp。相对于介质支撑构件35在宽度方向x的相邻的位置处,在与位于起始位置hp的滑架24对置的下方位置配置有进行记录头25的维护的维护装置60。维护装置60具备:帽61,其覆盖滑架24位于起始位置hp时的记录头25;以及刮片62,其擦拭记录头25的喷嘴面。记录头25被帽61覆盖,从而记录头25的喷嘴内的油墨等液体的增粘或干燥得到抑制。在喷嘴内的液体增粘或者喷嘴内的液体中有气泡或者喷嘴被纸屑等异物堵塞的情况下,产生由于喷嘴的堵塞而无法从喷嘴正常地喷出液体的喷出不良。
55.维护装置60为了消除或者预防这种喷出不良而对记录头25的喷嘴进行清洗。维护装置60具备与帽61连通的泵63。维护装置60在帽61与记录头25的喷嘴面以包围喷嘴的状态接触的加盖状态下驱动泵63。当泵63被驱动时,通过被导入到喷嘴面与帽61之间的封闭空间的负压,液体被从喷嘴强制性地抽吸排出。增粘后的液体、气泡、纸屑等异物被从喷嘴强制性地抽吸排出,从而喷嘴从喷出不良恢复。
56.另外,记录部23在对介质m进行记录的记录动作的中途定期或者不定期地移动到起始位置hp,进行从记录头25的全部喷嘴向帽61喷出与记录没有关系的液滴的空喷出(也称为“冲洗”。),从而预防记录中的喷出不良。通过清洗和空喷出被从喷嘴排出了的液体(废液)通过泵63的驱动而经过废液管被送到废液罐69。
57.如图4、图5所示,记录装置11具备前述的第一供送部21和第二供送部22。第一供送部21具备作为对盒27中堆叠的介质组中的最上位的1个介质m进行供送的供送辊的一例的拾取辊211(参照图6)。第二供送部22具备将载置于供送托盘22a的介质m逐一供送的供送用辊221。另外,记录装置11具备前述的输送辊对41和排出辊对42。记录装置11具备作为输送部40的驱动源的电机的一例的输送电机46。
58.如图4和图5所示,滑架24在起始位置hp(图4)与起始相反位置ah(图5)之间沿着扫描方向x移动。图4所示的滑架24的位置是起始位置hp,对介质m进行记录,成为非记录时的待机位置。
59.如图6所示,记录装置11具备输送介质m的介质输送装置200。介质输送装置200具备:拾取辊211,其是供送介质m的供送辊的一例;输送驱动辊43,其是将被供送的介质m向记录头25输送的输送辊的一例;以及输送电机46,其是拾取辊211与输送驱动辊43共用的驱动源。即,输送电机46是供送部20与输送部40共用的驱动源。
60.另外,如图6所示,介质输送装置200具备拾取辊211和锁定构件68作为以输送电机46为驱动源的输送驱动辊43以外的可动构件的一例。锁定构件68是与位于起始位置hp的滑架24卡合而将滑架24锁定于起始位置hp的构件。锁定构件68在与位于起始位置hp的滑架24卡合的锁定位置和不与滑架24卡合的锁定解除位置之间移动。
61.另外,如图6所示,介质输送装置200具备第一供送机构70作为包含将输送电机46的动力传递到拾取辊211的齿轮在内的动力传递机构的一例、以及维护机构65作为包含将输送电机46的动力传递到锁定构件68的齿轮在内的动力传递机构的一例。维护机构65是驱动维护装置60的齿轮机构。因此,可通过传递到维护机构65的动力移动,帽61、刮片62以及泵63也分别构成可动构件的一例。而且,介质输送装置200具备第二供送机构80作为包含将输送电机46的动力传递到供送用辊221的齿轮在内的动力传递机构的一例,供送用辊221也是可动构件的一例。
62.输送驱动辊43通过输送电机46的动力而旋转。该输送驱动辊43的旋转分别经由第一供送机构70、第二供送机构80以及维护机构65传递到拾取辊211、供送用辊221以及锁定构件68。即,基于输送电机46的动力的输送驱动辊43的旋转动力经由第一供送机构70传递到拾取辊211,从而拾取辊211旋转。另外,基于输送电机46的动力的输送驱动辊43的旋转动力经由第二供送机构80传递到供送用辊221,从而供送用辊221旋转。
63.基于输送电机46的动力的输送驱动辊43的旋转动力经由维护机构65传递,从而帽61、刮片62以及锁定构件68升降。此时,帽61、刮片62以及锁定构件68受到输送电机46的驱动而上升以及下降。另外,泵63受到来自输送电机46的驱动,进行通过帽61抽吸空气的泵驱动。此外,也可以设为将帽61和刮片62的升降与锁定构件68的升降分离并能分别独立地升降的构成。例如,可以设为锁定构68以输送电机46的动力升降、帽61和刮片62以输送电机46以外的专用电机等其它电机的动力升降的构成。另外,也可以采用通过将帽61和刮片62支撑于向下降方向施力的滑块且在滑架24向起始位置hp移动的过程中与滑块卡合并使滑块
对抗作用力而向斜上方移动从而使帽61和刮片62上升的机械式升降机构。
64.如图6所示,这样本实施方式的介质输送装置200具备拾取辊211、供送用辊221、锁定构件68、帽61、刮片62以及泵63作为将输送电机46设为共用的驱动源的多个可动构件的一例。并且,介质输送装置200具备将输送电机46的动力传递到这些可动构件的第一供送机构70、第二供送机构80以及维护机构65。输送电机46被图1所示的控制部100驱动控制。
65.如图6所示,介质输送装置200具备作为对输送电机46的动力被传递的动力传递路径的连接和切断进行切换的切换部的一例的第一切换部90和第二切换部85。第一切换部90通过滑架24移动到设定于扫描路径上的靠起始位置hp的位置的多个切换位置而被切换。第一切换部90进行将输送电机46的动力向作为输送辊对41和排出辊对42以外的可动构件的一例的拾取辊211或者锁定构件68等传递的动力传递路径的切换。第二切换部85通过滑架24移动到扫描路径上的靠起始相反位置ah存在的规定的切换位置而被切换。当第二切换部85被滑架24按压操作从而被切换时,将输送电机46的动力经由齿轮84将动力传递到未图示的上盒。上盒位于盒27的上方,在上盒中能收纳多张纸张,能与盒27独立地相对于装置主体12装拆。另外,即使一侧为未装载状态,若另一侧被装载,则也能从该被装载的盒送出介质m。
66.上盒设为能在可由第一供送部21进行介质m的供送的供送位置与比供送位置靠沿着介质供送方向的+y轴方向位移后的非供送位置之间移动,并构成为受到输送电机46的动力或者基于手动的外力而在供送位置和非供送位置之间移动。
67.介质输送装置200具备:齿轮组50,其是将通过输送电机46的动力而旋转的输送驱动辊43的旋转动力传递到第一动力传递机构的一例;以及第一供送机构70,其作为将齿轮组50的旋转动力传递到拾取辊211的第二动力传递机构的一例。第一切换部90对齿轮组50与第一供送机构70的连接状态和切断状态进行切换。
68.一对图7所示的拾取辊211以能绕被支撑为能以摆动轴71为中心摆动的摆动构件72的顶端部旋转的状态装配于装置主体12内的支撑框架(省略图示)。沿着与摆动轴71平行的宽度方向x延伸的旋转轴73能旋转地支撑于摆动构件72。输送电机46的动力经由输送驱动辊43、齿轮组50以及旋转轴73并经由设置于摆动构件72的齿轮列74传递到拾取辊211。齿轮列74包括以相邻的彼此啮合的状态排列成一列的多个齿轮。旋转轴73与构成齿轮列74的最上游的齿轮75连结。在旋转轴73的端部装配有构成齿轮组76的齿轮77。
69.另外,通过摆动轴71的转动来变更摆动构件72的姿势角度。该摆动轴71通过扭簧等弹性构件(省略图示)的弹力对摆动构件72向使拾取辊211与介质m接触的方向施力。另外,盒27能插拔于装置主体12的开口。在记录装置11中,在盒27被从装置主体12拔出的过程中摆动构件72具有使拾取辊211移动到与盒27上的介质m分离的保持位置的机构。并且,在盒27插装于装置主体12的过程中,摆动构件72从分离位置移动到拾取辊211与介质m接触的供送位置。
70.输送电机46的动力经由动力传递机构47传递到作为输送驱动辊43的起始相反位置ah侧的端部的第一端部处固定的齿轮51。输送驱动辊43通过该齿轮51的旋转而旋转。当输送电机46被正转驱动时,输送驱动辊43和排出驱动辊45向能将介质m向输送方向y0输送的方向正转。在记录装置11的记录中,输送电机46被正转驱动,从而介质m被向输送方向y0输送。输送驱动辊43固定有在其轴向上位于第一端部附近的齿轮52和位于与第一端部相反
的一侧的端部即第二端部的齿轮53。齿轮53与构成齿轮组50的1个输入齿轮54啮合。
71.记录装置11具备第一切换部90和第二切换部85作为通过滑架24对输送电机46的动力的传递路径进行切换操作的切换部的一例。第一切换部90具备能在宽度方向x上移动地设置的滑块91。滑块91被弹性构件92的弹力向作为滑架24从起始位置hp朝向起始相反位置ah的方向的第一方向x1施力。
72.滑块91具有在滑架24的背面侧突出的突部241(参照图15)与滑架24一起在宽度方向x上向作为从起始相反位置ah朝向起始位置hp的方向的第二方向x2移动的过程中能抵接的抵接部93。另外,滑块91在其上部具有卡合部94。卡合部94与在其背面侧设置于对置的位置的凸轮构件95卡合。另外,在滑块91的下侧具有切换齿轮96。切换齿轮96与滑块91一起在宽度方向x上移动。
73.滑架24移动到作为切换第一切换部90的切换位置的起始位置hp、供送连接位置sp、以及供送切断位置fp,所述起始位置hp是待机位置,所述供送连接位置sp从起始位置hp向第一方向x1离开少量的规定距离,所述供送切断位置fp是起始位置hp与供送连接位置sp之间的位置。当滑架24位于起始位置hp时,滑块91配置于将滑架24锁定到起始位置hp时的第一切换位置sw1。当滑架24位于供送连接位置sp时,滑块91配置于使第一供送部21驱动时的第二切换位置sw2。当滑架24位于作为比供送连接位置sp靠第二方向x2侧的位置的供送切断位置fp时,滑块91位于第三切换位置sw3。当滑架24位于比第二切换位置sw2靠第一方向x1侧的位置的、对介质m进行记录的记录中的位置时,滑块91通过弹性构件92的作用力而配置于待机位置。
74.图8、图9示出当滑架24位于供送连接位置sp(参照图4)时滑块91位于第二切换位置sw2的状态。如图8、图9所示,当滑块91位于第二切换位置sw2时,切换齿轮96与供送系统的齿轮78(参照图9)啮合,并且凸轮构件95配置于使第一供送部21驱动的供送位置。
75.图10、图11示出当滑架24位于供送切断位置fp(参照图4)时滑块91位于第三切换位置sw3的状态。当滑块91位于第三切换位置sw3时,将切换齿轮96与供送系统的齿轮78(参照图11)的啮合解除,并且凸轮构件95配置于不使第一供送部21驱动的非供送位置。
76.图12、图13示出动力传递路径向维护机构65的连接/解除。即,图12示出动力传递路径向维护机构65的连接状态,图13示出动力传递路径向维护机构65的切断状态。维护装置60具有作为其驱动机构的前述的维护机构65。如图12、图13所示,维护机构65具有齿轮组67,所述齿轮组67包括包含配置于能与滑块91的切换齿轮96啮合的位置的驱动齿轮66在内的多个齿轮。驱动齿轮66与泵63的旋转轴一体地旋转。另外,齿轮组67与使帽61升降的升降机构(省略图示)以能传递动力的状态连结。
77.如图12~图14所示,支撑帽61的支撑部61a(参照图14)固定有用于将滑架24锁定于起始位置hp的锁定构件68。锁定构件68能与帽61和刮片62一起升降。如图14所示,滑架24在位于起始位置hp时与锁定构件68在铅垂方向上侧对置的位置处具有凹状的被卡合部24a。当滑架24位于起始位置hp的状态下锁定构件68上升时,锁定构件68与被卡合部24a卡合,将滑架24锁定到起始位置hp。当锁定构件68下降到图14中用双点划线所示的下降位置时,滑架24的锁定被解除,滑架24成为能从起始位置hp移动的状态。
78.记录装置11具备与位于起始位置hp的滑架24卡合的锁定构件68。锁定构件68在与滑架24卡合的锁定位置和不与滑架24卡合的锁定解除位置之间移动。锁定构件68移动到锁
定位置,从而将滑架24保持于起始位置hp。锁定构件68移动到锁定解除位置,从而滑架24成为能从起始位置hp移动的状态。
79.维护机构
80.维护机构65具备:升降机构,其使维护装置60中的帽61和刮片62升降;以及齿轮66,其驱动泵63。另外,锁定构件68通过使帽61升降的升降机构进行升降。因此,当滑架24位于起始位置hp时,记录头25由上升后的帽61覆盖,并且滑架24由上升后的锁定构件68锁定到起始位置hp。
81.如图3~图5所示,输送部40具备:输送辊对41,其在输送方向y0上位于夹着介质支撑构件35的两侧中的上游侧;以及排出辊对42(参照图4、图5),其位于下游侧。如图3~图6所示,输送辊对41是由输送驱动辊43和输送从动辊44形成对的构成。详细地说,输送辊对41由1个输送驱动辊43与能在和输送驱动辊43之间夹持介质m的多个输送从动辊44的对形成。排出辊对42由排出驱动辊45(参照图6)与能在和排出驱动辊45之间夹持介质m的多个排出从动辊(省略图示)的对形成。此外,排出从动辊例如是沿着其外周具有多个齿的锯齿辊。
82.如图4、图6所示,记录装置11具备:输送电机46,其是输送部40的驱动源;以及动力传递机构47,其将输送电机46的动力传递到输送驱动辊43和排出驱动辊45(参照图6)。动力传递机构47是包含将输送电机46的动力传递到各驱动辊43、45的定时带48的带式动力传递机构。动力传递机构47包含齿轮51。记录装置11设置有检测输送驱动辊43的旋转量的旋转编码器49。旋转编码器49具备:旋转标度49a,其固定于输送驱动辊43的旋转轴的端部;以及光学传感器49b,其检测旋转标度49a的旋转量。旋转编码器49输出包含与输送驱动辊43的旋转量成比例的数量的脉冲的脉冲信号。
83.记录装置的电构成
84.接着,参照图16对记录装置11的电构成进行说明。控制部100进行包含针对记录装置11的记录控制的各种控制。控制部100具备根据计算机程序(软件)进行动作的1个以上的处理器。处理器包含cpu和ram及rom等存储器,存储器保存有构成为使cpu执行处理的程序代码或指令。控制部100不限于进行软件处理。例如,控制部100可以具备针对自身所执行的处理的至少一部分进行硬件处理的专用的硬件电路(例如面向特定用途的集成电路:asic)。
85.控制部100电连接有记录头25、滑架电机32以及输送电机46作为输出系统。控制部100控制记录头25、滑架电机32以及输送电机46。另外,控制部100电连接有电源操作部16、介质检测器28、线性编码器34以及旋转编码器49作为输入系统。
86.控制部100具备第一计数器101、第二计数器102、运算部103、电机控制部104、电机驱动器105以及非易失性存储器106。电机驱动器105具备d/a转换器107(以下,也称为“dac107”。)。
87.第一计数器101将由供送部20供送的介质m的顶端被介质检测器28探测到时的介质m的位置作为原点位置,并计数从旋转编码器49输入的检测脉冲信号的脉冲边缘的数量,从而计数相当于介质m的顶端或后端的位置的值。控制部100以介质m的顶端或后端的被计数的位置为基础来控制输送电机46,控制介质m的供送、输送以及排出。
88.第二计数器102以滑架24与起始位置hp侧的末端位置接触并到达原点位置时为原点,并记数从线性编码器34输入的检测信号的脉冲边缘的数量,从而取得以滑架24的原点
位置为基准的扫描方向x的位置即滑架位置。控制部100以滑架位置的计数值为基础来控制滑架电机32,从而进行滑架24的速度控制和位置控制。
89.运算部103进行在使记录装置11动作上所需的各种运算。在本实施方式中,运算部103进行算出第二限制值ilim2的运算。另外,运算部103进行在执行程序pr上所需的各种设定值等的运算。
90.电机控制部104对电机驱动器105输出电流指令值,从而对输送电机46进行速度控制。电机控制部104例如将pwm(pulsewidthmodulation:脉冲宽度调制)指令值输出到电机驱动器105。电机驱动器105进行基于输入的pwm指令值的pwm控制,从而控制提供给输送电机46的电流。
91.非易失性存储器106存储有程序pr。另外,非易失性存储器106存储第一限制值ilim1和第二限制值ilim2。第一限制值ilim1和第二限制值ilim2是限制输送电机46的电流值的上限值。控制部100将驱动输送电机46时流过输送电机46的电流抑制为限制值以下。详细地说,电机控制部104将对电机驱动器105输出的电流指令值限制为限制值以下。在此,第一限制值ilim1是预先设定的固定值,第二限制值ilim2是基于输送电机46的电流测定值设定的可变值。第一限制值ilim1设定为输送电机46的额定电流以下的规定值。第二限制值ilim2是基于控制部100在输送电机46的驱动中测定的输送电机46的测定电流值imea设定的。详细地说,控制部100将在驱动中流过输送电机46的电流值测定为测定电流值imea,将测定电流值imea加上预定的偏移值iof,从而设定提供给输送电机46的电流的限制值。
92.控制部100当电源被接通时进行初始化动作。另外,以每当每次接通电源时或者多次接通电源时进行1次的比例进入初始化动作中的负荷测定模式。在负荷测定模式中,控制部100使输送电机46驱动来测定施加于输送电机46的负荷。在该负荷测定模式中,控制部100是在滑架24位于起始位置hp且第一切换部90位于第一切换位置sw1的状态下进行的。因此,在负荷测定模式中,拾取辊211和供送用辊221未被驱动,当输送驱动辊43和排出驱动辊45被驱动时,施加于输送电机46的负荷被测定为电流值。
93.控制部100控制输送电机46的电流来控制输送驱动辊43和排出驱动辊45的旋转速度。也就是说,控制部100控制输送电机46的电流,从而控制输送辊对41和排出辊对42输送介质m的输送速度vpf。
94.电机控制部104通过反馈控制进行输送速度控制。非易失性存储器106存储有输送控制用的速度曲线数据。速度曲线数据是示出从控制开始位置到每隔单位控制间隔的位置与目标速度的对应关系的数据。非易失性存储器106按多个不同的目标输送速度中的每一目标输送速度存储有速度曲线数据。记录装置11具备多个记录模式。在记录模式中准备了包含使记录速度优先于记录质量的标准记录模式和使记录质量优先于记录速度的高清晰记录模式的多种。用户选择输入与介质m的种类相应的记录模式。电机控制部104当与受理到的记录模式相应的目标输送速度确定时,将与该目标输送速度对应的速度曲线数据从非易失性存储器106读出。电机控制部104将基于速度曲线数据决定的电流指令值输出到电机驱动器105。在此,速度曲线数据包含加速用数据和减速用数据。电机控制部104当进行加速控制时使用加速用的速度曲线数据,当进行减速控制时使用减速用的速度曲线数据。另外,非易失性存储器106相对应地存储有与速度曲线数据的目标速度对应的电流指令值。
95.电机控制部104从第一计数器101取得从控制开始位置到每隔控制间隔的位置,所
述第一计数器101对从编码器49输入的脉冲检测信号的脉冲边缘的数量进行计数。也就是说,电机控制部104通过第一计数器101的计数值取得以控制开始位置为起点的当前的位置(当前输送位置)。另外,电机控制部104根据基于从编码器49输入的脉冲检测信号的每单位时间的脉冲边缘的数量取得实际速度vr。在反馈控制中,电机控制部104校正电流指令值,以减小实际速度vr与目标速度vt的差值δv。例如,在输送负荷比假定负荷小的情况下,实际速度vr与目标速度vt的差值δv(=vt-vr)取负值,因此,电机控制部104将电流指令值校正为较小的值。此时的电流指令值的减量是根据差值δv的值来决定的。另外,在输送负荷大于假定负荷的情况下,实际速度vr与目标速度vt的差值δv(=vt-vr)取正值,因此,电机控制部104将电流指令值校正为较大的值。此时的电流指令值的增量是根据差值δv的值来决定的。
96.因而,在输送负荷比假定负荷大的情况下,电流指令值变大。输送电机46的电流值是由电流指令值决定的。因此,控制部100能根据电机控制部104的电流指令值的值来测定输送电机46的电流值。在负荷测定中,控制部100根据在输送电机46达到目标输送速度后的恒速范围中电机控制部104所输出的电流指令值来测定电流值,将其取得为测定电流值imea。例如,控制部100将输送电机46的恒速范围中的多点电流指令值平均后的值设为测定电流值imea。在本例中,将测定电流值imea取得为相当于电流指令值的值。此外,也可以取得换算为相当于输送电机46的电流值的值的测定电流值imea。
97.该负荷测定是为了设定提供给输送电机46的电流的限制值而进行的,使得当使第一供送部21驱动时不会对第一供送机构70的齿轮等构成要素施加过大的转矩。该电流的限制值用于检测如齿轮破损那样的异常负荷。控制部100根据电机控制部104所输出的电流指令值超过限制值来检测异常负荷,使电机控制部104停止输送电机46的驱动。
98.以往,以所假定的最大负荷为基础设定了电流限制值。因此,在记录装置11刚购买后等负荷小的开始使用的初始阶段,在施加了意料外的负荷的情况下,齿轮有破损的风险。也就是说,输送电机46的转矩的一部分由于滑动阻力等而损失,剩余的一部分用于辊或齿轮的旋转转矩。在记录装置11开始使用的初始阶段,即使输送电机46的输出转矩相同,辊或齿轮等的滑动阻力等损失也相对地小,因此,易于对齿轮等施加过大的旋转转矩。另外,越是通过齿轮列的齿轮比减速,转矩越是变得越大。因此,在输送电机46的动力传递路径上施加比较大的转矩的齿轮有可能施加超过假定转矩的过大的转矩而破损。
99.另一方面,当将电机电流的限制值设定为较低的值时,虽然能抑制施加于齿轮等的过大的转矩,但是有可能由于转矩不足而导致无法适当地进行介质m的输送动作等规定的动作的情况。因此,不仅需要抑制施加于齿轮等的转矩变得过大,而且需要确保输送动作等规定的动作所需的转矩。但是,输送电机46的输出转矩中的施加于齿轮等的转矩以及能用于规定动作的转矩取决于辊或齿轮等旋转部件的滑动阻力等导致的损失转矩。该损失转矩取决于每一记录装置11的个体差异、记录装置11的累计记录时间、记录频度、累计记录张数等。
100.因此,本实施方式的控制部100将使输送电机46驱动时所施加的负荷测定为电流值,将该测定电流值imea加上预定的偏移值iof从而设定限制值。
101.另外,在本实施方式中,与将输送电机46设为共用的驱动源的多个可动构件中的、特别易于施加大的转矩的特定的可动构件的动力传递机构对应地设定限制值。特定的可动
构件将包含由于齿轮列的齿轮比的关系而易于施加大的转矩的齿轮在内的动力传递机构用于动力的传递。在本例中,特定的可动构件中的1个是拾取辊211。用于拾取辊211的驱动的齿轮列的齿轮比的最大值大于用于输送驱动辊43的驱动的齿轮列的齿轮比的最大值。此外,设定不仅能抑制齿轮的缺齿等破损、还能抑制在动力传递机构包含齿轮以外的部件的情况下该部件的破损的程度的限制值。
102.该负荷测定模式中的负荷测定是在滑架24位于起始位置hp的状态下进行的。也就是说,是在第一切换部90被切换为输送驱动辊43与第一供送机构70的连接被切断的第一切换位置sw1的状态下进行的。
103.控制部100通过控制流过输送电机46的电流而使输送电机46驱动。控制部100通过在输送电机46的驱动中流过输送电机46的电流值来测定施加于输送电机46的负荷,将该测定电流值imea加上预定的偏移值iof,并设定电流的限制值。基于测定了该输送电机46的负荷的测定电流值imea来设定第二限制值ilim2。
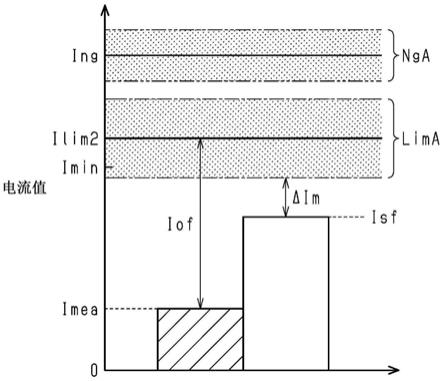
104.接着,参照图17、图18对第二限制值ilim2的设定方法详细地进行说明。在此,图17示出将记录装置11开箱后开始使用的开始使用的初始阶段中的第二限制值ilim2的设定方法。另外,图18示出记录装置11被使用到接近耐用年限时的第二限制值ilim2的设定方法。
105.本实施方式的记录装置11例如测定当电源操作部16被操作了的电源接通时使输送电机46驱动并通过输送辊对41等的驱动而施加于输送电机46的输送系统的负荷。该测定是在滑架24位于起始位置hp且第一切换部90位于第一切换位置sw1的状态下进行的。其原因是,当在第一切换部90切换为第二切换位置sw2的状态下输送电机46被驱动时,当负荷测定时从盒27输送介质m。因此,通过在滑架24位于起始位置hp且第一切换部90位于第一切换位置sw1的状态下进行负荷测定,从而防止在记录以外的时期介质m被输送。
106.在图17和图18所示的2个坐标图中,虽然所设定的第二限制值ilim2的值根据测定电流值imea的值的大小和偏移值iof的值的大小的不同而不同,但是测定方法是相同的。因此,基于图17所示的坐标图对第二限制值ilim2的设定方法进行说明。
107.控制部100当电源接通时保持第一切换部90为非连接的状态使输送电机46驱动,从而取得施加于输送电机46的负荷电流作为测定电流值imea。也就是说,控制部100在供送部20未被驱动且输送部40被驱动的状态下,取得施加于输送电机46的负荷电流作为测定电流值imea。然后,运算部103将该测定电流值imea加上偏移值iof,从而算出第二限制值ilim2。这样第二限制值ilim2存储到非易失性存储器106。
108.在此,如图17所示,第二限制值ilim2包含各种偏差。因此,第二限制值ilim2在偏差范围lima内发生偏差。
109.图17所示的值isf是使输送部40以及第一供送机构驱动时所需的输送电机46的电流值。为了能将介质m从盒27可靠地供送,而需要该供送电流值isf。并且,偏差范围lima的下限值被设定为对供送电流值isf加上规定的容限电流δim而得到的值。
110.另外,在图17中,值ing示出产生齿轮的缺齿的电流值。产生该齿轮的缺齿的异常电流值ing在偏差范围nga内发生偏差。第二限制值ilim2被设定成第二限制值ilim2的偏差范围的上限值成为比异常电流值ing的偏差范围的下限值小的值。
111.另外,在图18所示的坐标图中,记录装置11被使用到接近耐用年限的结果是,示出输送电机46的负荷电流的测定电流值imea与图17所示的初始阶段的值相比而增大。该负荷
的增大起因于构成输送部40的各辊对41、42的旋转轴的滑动阻力的增大或辊本身的磨损等。
112.在本实施方式中,第二限制值ilim2设定于当第一限制值ilim1的电流流过输送电机46时由于发生卡纸等异常时的过大转矩而有可能发生构成动力传递机构的齿轮等部件的破损等缺陷的期间内。在本例中,控制部100将限制值设定于对动力传递机构施加最大负载的期间。在该期间内,将电流的限制值设定为比设定于该期间以外的其它期间的值小的值。
113.在本例中,当产生异常负荷时对动力传递机构施加最大负载的期间是拾取辊211被驱动的供送期间st。在拾取辊211被驱动的供送期间st中,电流的限制值设定比作为供送期间st以外的其它期间的输送期间ft中设定的第一限制值ilim1小的第二限制值ilim2。
114.记录装置11具备进行介质m的卡纸的恢复操作时所操作的操作部。本例的记录装置11的设置于操作面板15的触摸面板式显示部15a构成操作部的一例。第一切换部90是如下构成:通过记录头25所设置的滑架24移动到在作为与介质m的输送方向y0交叉的方向的扫描方向x上移动的扫描路径上的规定的切换位置从而被切换。在本例中,当输送电机46向输送介质m的旋转方向正转驱动时,锁定构件68成为从锁定位置向锁定解除位置移动的构成。
115.第二限制值ilim2也设定于有可能发生齿轮的缺损等部件的破损的其它期间。在本实施方式中,控制部100当检测出卡纸等异常时,使输送电机46紧急停止。控制部100当受理消除了卡纸的用户操作了操作部的恢复操作时,为了使滑架24移动而进行使锁定构件68向锁定解除位置移动来解除滑架24的锁定的滑架锁定解除动作。在该滑架锁定解除动作期间lt(参照图20)中,控制部100也设定第二限制值ilim2。其原因是,当发生卡纸等异常时,用户进行将卡纸的介质m除去的除去作业,但有时用户不将介质m除去而操作操作部来进行恢复操作。
116.当在卡纸的介质m残留的状态下进行使输送电机46向作为将介质m向输送方向y0输送的旋转方向的正转方向驱动的其它动作时,输送驱动辊43向将卡纸加速的方向旋转,因此,过大的电流流过输送电机46。该过大的电流对齿轮施加过大的转矩,并成为齿轮破损的原因。因此,在本实施方式中,在卡纸的介质m残留的状态下输送电机46有可能被正转驱动的动作期间内,将输送电机46的电流的限制值设定为比第一限制值ilim1小的第二限制值ilim2。
117.此外,当发生卡纸等异常时,有记录装置11的电源未被关断地在操作面板15的显示部15a中显示异常发生的含义的信息的情况、以及记录装置11被强制性地关断电源的情况。在前者的情况下,用户在将卡纸的介质m除去后,操作触摸面板式操作部,从而进行恢复操作。另外,在后者的情况下,用户在将卡纸的介质m除去后,操作电源操作部16,从而进行恢复操作。
118.控制部100当在记录中检测出介质m的卡纸时,使滑架24移动到起始位置hp,当滑架24到达起始位置hp时,使输送电机46反转驱动从而使锁定构件68从解除位置向锁定位置移动。由此在将滑架24锁定于起始位置hp的状态下使其待机。控制部100在显示部15a中显示发生卡纸的含义和提醒卡纸的消除的信息。看到该信息的用户当从记录装置11除去卡纸的介质m时,进行操作电源操作部16或选择操作部的恢复操作。控制部100当受理操作部的
恢复操作时,在设定了第二限制值ilim2之后,使输送电机46正转驱动并使锁定构件68从锁定位置向锁定解除位置移动。另外,控制部100当滑架24的锁定被解除时,将电流的限制值从第二限制值ilim2变更为第一限制值ilim1。
119.图19是示出供送期间和输送期间中的电流的限制值的设定内容的坐标图。横轴示出介质m的输送位置,左侧的纵轴示出输送速度,右侧的纵轴示出输送电机46的电流值。在该坐标图中,示出供送速度vsf和输送速度vpf。在供送期间st内,拾取辊211和驱动辊43、45被驱动。在输送期间ft内,仅拾取辊211和驱动辊43、45中的驱动辊43、45被驱动。此外,在记录装置11是串行打印机的情况下,在记录中记录介质m被间歇输送,但在图19的坐标图中,用忽略了间歇输送的区域中的加速和减速的波形进行描绘。
120.如图19所示,将电流的限制值变更为较小的值的期间是拾取辊211被驱动的供送期间st中的包含拾取辊211的最大速度范围的至少一部分的期间。最大速度范围是指供送速度vsf成为作为最大速度的恒定速度vc的恒速范围。在图19所示的例子中,将电流的限制值变更为较小的值的期间是拾取辊211被驱动的供送期间st中的全部期间。也就是说,在第一切换部90位于第二切换位置sw2的供送期间st中,输送电机46的电流的限制值被设定为第二限制值ilim2。
121.控制部100在作为可动构件的一例的拾取辊211被驱动的供送期间st中的至少一部分期间中,设定比作为拾取辊211未被驱动的期间的输送期间ft中设定的第一限制值ilim1小的第二限制值ilim2。
122.详细地说,供送期间st的供送速度vsf的速度曲线包含加速范围、恒速范围以及减速范围。将电流的限制值变更为较小的值的期间只要是包含供送期间st中的至少恒速范围的一部分的期间即可。在本例中,如图19所示,在包含加速范围、恒速范围以及减速范围的供送期间st的整个区域中,电流的限制值设定为第二限制值ilim2。
123.当滑架24移动到供送连接位置sp时,第一切换部90被切换为第二切换位置sw2。此时,凸轮构件95在供送位置处工作。凸轮构件95被保持于供送位置,从而即使滑架24离开供送连接位置sp,在凸轮构件95位于供送位置的期间,第一切换部90也被保持于第二切换位置sw2。也就是说,滑块91被保持于第二切换位置sw2。
124.控制部100通过滑架24的动作将第一切换部90从第二切换位置sw2切换为第三切换位置sw3,从而从供送期间st切换为输送期间ft。控制部100当进行该切换时将电流的限制值从第二限制值ilim2变更为第一限制值ilim1。
125.此外,供送期间st是拾取辊211与盒27内的记录对象的介质m接触并送出介质m的期间。因此,供送期间st根据作为介质m的输送方向y0的长度的介质长度的不同而变化。
126.在图19中,供送期间st结束时的介质m的输送方向y0的位置ys是记录中的介质m的后端与拾取辊211脱离时的位置。控制部100当基于第一计数器101的计数值判断为介质m到达了位置ys时,通过滑架24的动作使供送期间st结束。例如,当滑架24移动到比供送连接位置sp靠第二方向x2侧的规定的位置时,凸轮构件95的供送位置的保持被解除。通过该解除,第一切换部90的滑块91复原为待机位置。由于供送期间st的结束,拾取辊211不再旋转。因此,后续的介质m不会被从盒27供送。此外,也可以在将后续的介质m与先行的介质m的后端空出间隔的状态、或者将先行的介质m的后端部与后续的介质m的顶端部重叠一部分的状态下,在先行的介质m的记录中开始后续的介质m的供送。
127.然而,当在供送期间st中发生介质m的卡纸时,输送电机46的电流值超过第二限制值ilim2,因此在该时点输送电机46的驱动被停止。另外,当在输送期间ft中发生介质m的卡纸时,输送电机46的电流值超过第一限制值ilim1,因此在该时点输送电机46的驱动被停止。控制部100在检测出卡纸并使输送电机46紧急停止的情况下,使滑架电机32驱动并使滑架24移动到起始位置hp。然后,控制部100使输送电机46反转驱动,从而使锁定构件68从锁定解除位置向锁定位置移动。由此,锁定构件68与滑架24卡合,滑架24被保持于起始位置hp。在此,卡纸有由于在拾取辊211、输送辊对41或者排出辊对42处介质m堵塞且输送电机46的电流值超过限制值从而被检测出的情况、以及由于滑架24与介质m接触且由于其大的负荷使滑架电机32的电流值超过限制值从而被检测出的情况。
128.图20是示出在发生卡纸等异常后、在受理到由用户进行的恢复操作后设定的电流的限制值的坐标图。恢复动作是与输送没有关系的动作,但输送电机46被锁定构件68的滑架锁定解除动作驱动。因此,在图20中,由用输送位置示出横轴、用输送速度示出左侧的纵轴、用电流值示出右侧的纵轴的坐标图来示出滑架锁定解除动作。
129.如该坐标图所示,控制部100当受理恢复操作时,进行使锁定构件68从锁定位置向锁定解除位置移动的滑架锁定解除动作。在本实施方式中,锁定构件68将输送电机46设为驱动源,因此当使锁定构件68驱动时,输送系统的驱动辊43、45一同被驱动。另外,在供送期间st进行了输送电机46的紧急停止的情况下,当进行恢复操作时,有时切换齿轮96与齿轮78处于啮合。在这种情况下,当为了恢复动作而驱动输送电机46时,拾取辊211被驱动。因此,在图20中示出了供送速度vsf和输送速度vpf。
130.恢复动作是使滑架24往复移动来确认在其扫描路径上没有与滑架24干扰的卡纸的介质m的动作。当受理恢复操作时,首先为了使滑架24进行恢复动作而进行将滑架24的锁定解除的滑架锁定解除动作。该滑架锁定解除动作是通过输送电机46的正转驱动来进行的,因此,输送驱动辊43、排出驱动辊45以及拾取辊211中的至少输送驱动辊43和排出驱动辊45旋转。此时,若卡纸的介质m残留于输送路径上,则会使该卡纸进一步严重并且施加于输送电机46的负荷增大。此时,若拾取辊211处于能驱动的状态,则当进行滑架锁定解除动作时过大的转矩施加于构成第一供送机构70的齿轮且有可能破损等。因此,在滑架锁定解除动作期间lt,电流的限制值设定与供送期间st相同的第二限制值ilim2。
131.接着,对记录装置11的作用进行说明。
132.当记录装置11的电源被接通时,控制部100执行图21所示的限制值设定程序。
133.首先,在步骤s11中,控制部100使输送电机46空转来测定负荷电流imea。控制部100在滑架24位于起始位置hp的状态下使输送电机46驱动。起始位置hp是第一切换部90的第一切换位置sw1,因此即使输送电机46被驱动,拾取辊211和供送用辊221也不会被驱动。因此,输送驱动辊43和排出驱动辊45不输送介质m地进行空转。控制部100根据恒速范围的电流指令值来测定输送电机46的驱动中的电流值。此时,可测定输送驱动辊43、排出驱动辊45以及输送系统的动力传递机构的负荷。测定出的负荷电流被取得为测定电流值imea。
134.在步骤s12中,控制部100通过ilim2=imea+iof来算出第二限制值ilim2。该运算是控制部100的运算部103进行的。
135.在步骤s13中,控制部100判定是否是ilim2≤ilim1。控制部100若是ilim2≤ilim1,则前进至步骤s14,若不是ilim2≤ilim1,则前进至步骤s15。
136.在步骤s15中,控制部100设定ilim2=ilim1。也就是说,控制部100将第一限制值ilim1设为最大值,在算出的第二限制值ilim2超过第一限制值ilim1的情况下,将第二限制值ilim2设定为第一限制值ilim1。
137.在步骤s14中,控制部100判定是否是ilim2>imin。在此,imin是第二限制值的下限值。控制部100若是ilim2>imin,则将该程序结束,若不是ilim2>imin,则前进至步骤s16。
138.在步骤s16中,控制部100设定为ilim2=imin。也就是说,控制部100在算出的第二限制值ilim2是下限值imin以下的情况下,将第二限制值ilim2设定为下限值imin。这样通过限制值设定处理来设定第二限制值ilim2。控制部100将第二限制值ilim2存储到非易失性存储器106。
139.在开始使用记录装置11的初始阶段,设定图17所示的第二限制值ilim2。另外,当将记录装置11的耐用期间结束时,设定图18所示的第二限制值ilim2。随着使用记录装置11,辊43、45、211或动力传递机构的滑动阻力等变大。因此,测定电流值imea随着记录装置11的累计使用时间变长而变大。另外,拾取辊211和供送系统的动力传递机构的负荷随着记录装置11的累计使用时间变长而变大。因此,偏移值iof随着记录装置11的累计使用时间变长而被分阶段地设定为大的值。非易失性存储器106存储有示出记录装置11的累计使用量的参数与偏移值iof的对应关系的数据。累计使用量的参数的一例是累计使用时间。作为其它的示例,可举出累计记录张数、累计油墨消耗量等。控制部100计测记录装置11的累计使用量,将该计测到的累计使用量存储到非易失性存储器106。控制部100取得与进行测定电流值imea的测定时从非易失性存储器106读出的累计使用量对应的偏移值iof。并且,控制部100将测定电流值imea测定为随着累计使用时间变长而变大的值。
140.接着,对控制部100所执行的记录处理程序进行说明。控制部100当接收记录数据pd时,执行图22所示的记录处理程序。
141.首先,在步骤s21中,控制部100设定第二限制值ilim2。
142.在步骤s22中,控制部100使滑架24移动到供送连接位置sp。其结果是,滑块91移动到图8、图9所示的第二切换位置sw2,切换齿轮96与齿轮78啮合。其结果是,被切换为输送电机46的动力能传递到拾取辊211的状态。
143.在步骤s23中,控制部100使输送电机46正转驱动。其结果是,拾取辊211旋转,盒27内的介质m中的最上位的1张被供送。介质m的顶端在供送中途被介质检测器28探测。第一计数器101以介质检测器28探测到介质m的顶端的位置为原点来计数从编码器49输入的检测脉冲信号的脉冲边缘的数量,从而在第一计数器101中计数相当于作为介质m的输送方向y0的位置的输送位置的计数值。介质m由拾取辊211输送直至介质m的顶端到达输送辊对41为止。在该供送期间st,设定第二限制值ilim2作为输送电机46的电流的限制值。当介质m的顶端到达输送辊对41时,其以后的介质m由拾取辊211和输送辊对41输送。而且,之后介质m由拾取辊211、输送辊对41以及排出辊对42输送。
144.在步骤s24中,控制部100判定是否发生了卡纸。在该供送期间st中,控制部100根据由电流指令值指令的电流值超过第二限制值ilim2而检测出卡纸。因此,控制部100判定由电流指令值指令的电流值是否超过第二限制值ilim2。控制部100若没有检测出卡纸,则前进至步骤s25,当检测出卡纸时,前进至步骤s29。
145.在步骤s25中,控制部100进行记录动作。即,控制部100驱动滑架电机32,在使滑架24向扫描方向x移动的中途从记录头25喷出液体,从而对介质m进行1进程量的记录。
146.在步骤s26中,控制部100判定供送是否已完成。即,控制部100判定记录对象的介质m的后端是否与拾取辊211分开。在此,控制部100基于记录数据pd所包含的记录条件信息取得介质尺寸的信息,根据介质尺寸取得介质长度。另外,控制部100从根据第一计数器101的计数值取得的介质m的顶端的位置加上介质长度而得到的值取得介质m的后端的位置。并且,若介质m的后端的位置超过拾取辊211,则控制部100判定为供送已完成。也就是说,控制部100判定为供送期间st已结束。控制部100若供送没有完成,则回到步骤s23,若供送完成,则前进至步骤s27。
147.在步骤s27中,控制部100设定第一限制值ilim1作为电流的限制值。
148.在步骤s28中,控制部100对输送电机46进行正转驱动。其结果是,介质m由输送辊对41和排出辊对42输送到下一记录位置为止。
149.在步骤s29中,控制部100判定是否发生了卡纸。在该输送期间ft中,控制部100根据由电流指令值指令的电流值超过第二限制值ilim2而检测出卡纸。因此,控制部100判定由电流指令值指令的电流值是否超过第二限制值ilim2。控制部100若没有检测出卡纸,则前进至步骤s30,若检测出卡纸,则前进至步骤s32。
150.在步骤s30中,控制部100进行记录动作。即,控制部100驱动滑架电机32,在使滑架24向扫描方向x移动的中途从记录头25喷出液体,从而对介质m进行1进程量的记录。
151.在步骤s31中,控制部100判定记录是否已完成。若记录没有完成,则回到步骤s28,反复进行输送动作(s28)、卡纸检测(s29)以及记录动作(s30)直至在步骤s31中判定为记录完成为止。控制部100若记录完成,则在对输送电机46进行正转驱动并将记录后的介质m后,将该程序结束。
152.在供送期间st和输送期间ft中的任意一者中检测出卡纸的情况下,控制部100执行步骤s32的处理。在步骤s32中,控制部100将输送电机46的驱动停止。其结果是,在检测出卡纸的情况下,输送电机46被强制性地停止驱动。
153.在步骤s33中,控制部100在异常标志f中设定“1”(f=1)。也就是说,控制部100将由于卡纸等异常所以将输送电机46的驱动停止了的含义的信息存储到非易失性存储器106的规定存储区域。
154.在步骤s34中,控制部100使滑架24向起始位置hp移动。即,控制部100驱动滑架电机32并使滑架24移动到起始位置hp。
155.在步骤s35中,控制部100使输送电机46反转驱动来锁定滑架24。即,控制部100使输送电机46反转驱动从而使锁定构件68从锁定解除位置向锁定位置移动。其结果是,如图14所示,通过锁定构件68与滑架24卡合,滑架24被锁定于起始位置hp。
156.在步骤s36中,控制部100使显示部15a显示提醒恢复操作的消息。此外,当进行卡纸等异常检测时,记录装置11的电源有时会被强制性地切断。
157.当发生卡纸且记录动作被中断时,看到显示于显示部15a的消息的用户将卡纸的介质m除去。另外,在电源被强制性地切断了的情况下,用户也将卡纸的介质m除去。并且,在将卡纸的介质m除去后,进行操作显示于显示部15a的触摸面板式ok按钮或者操作电源操作部16的恢复操作。受理到该恢复操作的控制部100执行图23所示的恢复处理程序。
158.以下,一边参照图23一边说明恢复处理。此外,恢复处理兼具确认在滑架24的扫描路径上没有异物并且重新设定滑架24的原点位置的处理。因此,恢复处理不仅在恢复操作时被执行,还在通常的电源接通时被执行。在进行恢复处理时,既有异常标志f为“0”的情况,也有异常标志f为“1”的情况。
159.首先,在步骤s41中,控制部100判定异常标志是否是f=1。若不是异常标志f=1,则前进至步骤s42,若是异常标志f=1,则前进至步骤s44。
160.在步骤s42中,控制部100设定第一限制值ilim1。
161.在步骤s43中,控制部100使输送电机46正转驱动来解除滑架24的锁定。即,控制部100通过使输送电机46正转驱动而使锁定构件68从锁定位置向锁定解除位置移动。其结果是,锁定构件68移动到在图14中用双点划线示出的锁定解除位置,滑架24的锁定被解除。
162.在步骤s44中,控制部100设定第二限制值ilim2。也就是说,在进行输送电机46紧急停止后的恢复操作时,设定第二限制值ilim2作为输送电机46的电流的限制值。
163.在步骤s45中,控制部100使输送电机46正转驱动来解除滑架24的锁定。即,控制部100使输送电机46正转驱动,从而使锁定构件68从锁定位置向锁定解除位置移动。然而,有时用户在保持不将卡纸的介质m除去的状态、或者保持虽然除去但是卡纸的介质m的一部分残留的状态下操作ok按钮或者电源操作部16。另外,在供送期间st中发生了卡纸检测所导致的输送电机46的紧急停止的情况下,在第一切换部90处于第二切换位置sw2的状态下输送电机46被正转驱动。在这种情况下,当卡纸的介质m的至少一部分残留于输送路径上时,由于过大的负荷,所以输送电机46的转矩变得过大。但是,当异常标志f=1时电流的限制值被设定为第二限制值ilim2,因此若输送电机46的电流值超过第二限制值ilim2,则输送电机46被紧急停止。其结果是,恢复处理时构成第一供送机构70的齿轮破损等得到抑制。此外,控制部100在滑架锁定解除动作的过程中监视输送电机46的电流值,检测在输送路径上有无卡纸的介质m。
164.在步骤s46中,控制部100设定第一限制值ilim1。
165.在步骤s47中,控制部100使滑架24往复移动。控制部100使滑架电机32驱动,使滑架24往复移动。控制部100在该滑架24往复移动的过程中监视滑架电机32的电流值是否超过阈值。此外,在滑架24往复移动的过程中滑架电机32的电流值超过限制值的情况下,使滑架电机32紧急停止。
166.在步骤s48中,控制部100判定是否有异常。即,控制部100判定滑架电机32的电流值是否超过阈值。控制部100若有异常,则前进至步骤s49,若没有异常,则前进至步骤s50。
167.在步骤s49中,控制部100将提醒恢复操作的消息显示于显示部15a。
168.在步骤s50中,控制部100使输送电机46反转驱动来锁定滑架24。即,控制部100使输送电机46反转驱动,从而使锁定构件68从锁定解除位置向锁定位置移动。若这样恢复处理无异常地结束,则记录装置11待机直至受理记录数据pd为止。此外,当异常标志f=0时,是通常的电源接通,因此,继续进行其它初始化动作。
169.根据上述实施方式,可以得到以下所示的效果。
170.(1)介质输送装置200具备:拾取辊211,其供送记录介质m;输送驱动辊43,其将被供送的记录介质m向记录头25输送;以及输送电机46,其是拾取辊211和/或输送驱动辊43的驱动源。而且,介质输送装置200具备:第一供送机构70,其是将输送电机46的动力传递到拾
取辊211的动力传递机构;以及控制部100,其对输送电机46进行电流控制。控制部100将输送电机46的驱动中的电流值测定为测定电流值imea,通过对测定电流值imea加上预定的偏移值iof来设定提供给输送电机46的电流的限制值ilim2。根据该构成,能设定与输送电机46的该时刻的负荷相应的适当的限制值ilim2。因此,能抑制输送驱动辊43和拾取辊211由输送电机46的动力驱动时构成第一供送机构70的齿轮的缺齿等,而且能设定与从记录装置11开始使用的初始阶段到结束耐用期间为止发生经时变化的该时刻的负荷相应的适当的限制值ilim2。因而,即使由于使用介质输送装置200所以施加于输送电机46的负荷发生经时变化,也能有效地抑制构成第一供送机构70的齿轮等部件的破损等缺陷的发生。
171.(2)介质输送装置200具备:拾取辊211,其供送记录介质m;输送驱动辊43,其将被供送的记录介质m向记录头25输送;输送驱动辊43以外的可动构件;以及输送电机46。而且,介质输送装置200具备:第一供送机构70,其是将输送电机46的动力传递到可动构件的动力传递机构;以及控制部100,其对输送电机46进行电流控制。控制部100将输送电机46的驱动中的电流值测定为测定电流值imea,对测定电流值imea加上预定的偏移值iof从而设定提供给输送电机46的电流的限制值ilim2。根据该构成,能设定与输送电机46的该时刻的负荷相应的适当的限制值ilim2。因此,能抑制输送驱动辊43和可动构件由输送电机46的动力驱动时构成第一供送机构70的齿轮的缺齿,而且能设定与从记录装置11开始使用的初始阶段到结束耐用期间为止发生经时变化的该时刻的负荷相应的适当的限制值ilim2。因而,即使由于使用介质输送装置200所以施加于输送电机46的负荷发生经时变化,也能有效地抑制构成第一供送机构70的齿轮等部件的破损等缺陷的发生。
172.(3)可动构件是拾取辊211。输送电机46是拾取辊211与输送驱动辊43共用的驱动源。根据该构成,能减少输送电机46的部件个数。
173.(4)控制部100将限制值ilim2设定于对作为动力传递机构的第一供送机构70施加最大负载的期间,在该期间,将电流的限制值设定为比该期间以外的期间中设定的第一限制值ilim1小的第二限制值ilim2。因而,能抑制使可动构件驱动时构成第一供送机构70的齿轮等的破损。另外,能确保不使可动构件驱动时输送动作等规定的动作所需的转矩。
174.(5)可动构件是拾取辊211。用于拾取辊211的驱动的齿轮列的齿轮比的最大值大于用于输送驱动辊43的驱动的齿轮列的齿轮比的最大值。设定第二限制值ilim2的期间是包含拾取辊211被驱动的供送期间st中的拾取辊211的最大速度范围的期间。因而,能抑制供送介质m的供送期间st中构成作为动力传递机构的第一供送机构70的齿轮等部件的破损等缺陷的发生。
175.(6)介质输送装置200具备:第一动力传递机构,其传递通过输送电机46的动力而旋转的输送驱动辊43的旋转动力;第一供送机构70,其是将作为第一动力传递机构的齿轮组50的旋转动力传递到可动构件的第二动力传递机构;以及第一切换部90,其将作为第一动力传递机构的齿轮组50与作为第二动力传递机构的第一供送机构70切换为连接状态和切断状态。控制部100根据由第一切换部90进行的切换状态,在可动构件被驱动的期间中的至少一部分期间设定比可动构件未被驱动的输送期间ft的第一限制值ilim1小的第二限制值ilim2。根据该构成,在可动构件被驱动的期间中的至少一部分期间,输送电机46的电流被限制为比可动构件未被驱动的期间中设定的第一限制值ilim1小的第二限制值ilim2。因而,能抑制可动构件被驱动时构成第一供送机构70的齿轮等部件的破损等缺陷的发生。此
外,在可动构件是拾取辊211的情况下,第一动力传递机构是齿轮组50,第二动力传递机构是第一供送机构70。另外,在可动构件是锁定构件68的情况下,第一动力传递机构是齿轮组50,第二动力传递机构是维护机构65。
176.(7)可动构件是拾取辊211。控制部100在拾取辊211被驱动的供送期间st,设定比输送驱动辊43输送记录介质m的输送期间ft中设定的第一限制值ilim1小的第二限制值ilim2作为电流的限制值。将第一切换部90从连接状态切换为切断状态,从而当从供送期间st切换为输送期间ft时,将电流的限制值从第二限制值ilim2变更为第一限制值ilim1。根据该构成,当从供送期间st切换为输送期间ft时,从第二限制值ilim2向第一限制值ilim1变更,因此不仅能抑制供送期间st内的齿轮的缺齿等缺陷的发生,而且能在输送期间ft中确保介质m的输送所需的大的转矩。例如,能抑制由输送电机46的转矩不足导致的介质m的输送位置的偏差。
177.(8)可动构件是在将设置记录头25的滑架24锁定于待机位置的锁定位置与以能使滑架24从待机位置移动的方式解除锁定的锁定解除位置之间移动的锁定构件68。根据该构成,能抑制锁定构件68被驱动时构成第一供送机构70的齿轮等部件的破损等缺陷的发生。
178.(9)具备进行记录介质m的卡纸的恢复操作时被操作的电源操作部16或者ok按钮等操作部。第一切换部90是如下构成:通过记录头25所设置的滑架24移动到在作为与记录介质m的输送方向y0交叉的方向的扫描方向x上移动的扫描路径上的规定的切换位置从而被切换。可动构件是在将滑架24锁定于待机位置的锁定位置与以能使滑架24从待机位置移动的方式解除锁定的锁定解除位置之间移动的锁定构件68。当输送电机46向输送记录介质m的旋转方向正转驱动时,锁定构件68从锁定位置向锁定解除位置移动。控制部100当检测出介质的卡纸时,使滑架24移动到待机位置后待机,并且使锁定构件68从解除位置向锁定位置移动,之后,当受理到操作部的恢复操作时,在设定了第二限制值ilim2之后,使输送电机46正转驱动并使锁定构件68从锁定位置向解除位置移动。
179.根据该构成,当发生卡纸而将输送电机46的驱动停止时,使滑架24移动到待机位置并且滑架24由移动到锁定位置的锁定构件68保持于待机位置。然后,进行了将卡纸的介质除去等恢复作业的用户对记录装置11进行恢复操作。受理到恢复操作的控制部100在将限制值设定为第二限制值ilim2后,使输送电机46正转驱动。因此,即使假定卡纸的记录介质m未被除去而输送电机46向与供送时相同的旋转方向正转驱动,提供给输送电机46的电流值也被限制为第二限制值ilim2,因此施加于构成第一供送机构70的齿轮的负荷得到抑制。因而,能抑制卡纸发生后的恢复动作时构成第一供送机构70的齿轮等部件的破损等缺陷的发生。
180.(10)控制部100当滑架24的锁定被解除时,将限制值从第二限制值ilim2变更为第一限制值ilim1。根据该构成,当锁定被解除时,输送电机46被向输送记录介质m的方向驱动,但设定限制输送电机46的电流的限制值ilim2,从而即使假定卡纸的记录介质m残留,也能抑制齿轮的缺齿等缺陷的发生。而且,在锁定被解除后,输送电机46的限制值从第二限制值ilim2变更为第一限制值ilim1。例如,之后,在锁定构件68从锁定解除位置向锁定位置移动的锁定过程中能确保比锁定解除过程时更大的转矩。例如,能更可靠地锁定滑架24。
181.(11)记录装置11具备介质输送装置200和对记录介质m进行记录的记录头25。根据该构成,记录装置11具备介质输送装置200,因此能得到与介质输送装置200同样的作用效
果。
182.(11)介质输送装置200的控制方法具备通过控制部100将输送电机46的驱动中的电流值测定为测定电流值imea、以及控制部100对测定电流值imea加上预定的偏移值iof从而设定提供给输送电机46的电流的限制值ilim2。根据该控制方法,即使由于使用介质输送装置200所以施加于输送电机46的负荷发生经时变化,也能有效地抑制构成第一供送机构70的齿轮等部件的破损等缺陷的发生。
183.此外,上述实施方式还能变更为以下所示的变更例那样的方式。而且,既能将上述实施方式和以下所示的变更例适当地组合而成的变更例设为进一步的变更例,也能将以下所示的变更例彼此适当地组合而成的变更例设为进一步的变更例。
184.如图24所示,可以在供送期间中的恒速范围和减速范围内设定第二限制值ilim2,在加速范围内将比限制值ilim2大的限制值ilim3设定为第二限制值。也就是说,可以在可动构件的驱动期间中设定多个阶段的值作为第二限制值。在图24的例子中,加速范围设定为比第一限制值ilim1小的第二限制值ilim3,但该第二限制值ilim3设定为比恒速范围的第二限制值ilim2大的值(ilim2<ilim3<ilim1)。根据该构成,不仅能抑制供送期间中的缺齿而且能确保加速范围所需的转矩。另外,在将记录装置11的耐用期间结束的时期,如在图24中用双点划线所示比初始阶段的第二限制值ilim2大的值的第二限制值ilim21是根据测定电流值而设定的。因而,从记录装置11的使用初始到结束耐用期间为止能设定适当的第二限制值ilim2。
185.在图24中,也可以在加速范围设定第一限制值ilim1。
186.在图19、图20、图24中,也可以在供送期间的减速范围设定第一限制值ilim1。
187.供送期间也可以是拾取辊211使被从盒27供送的介质m被输送辊对41夹持为止的期间或者该期间中的包含恒速范围的一部分期间。即使是这种供送期间,通过设定第二限制值ilim2,也能抑制构成第一供送机构70的齿轮等部件的破损。
188.可动构件可以是维护装置60的泵63。介质输送装置200具备维护装置60,所述维护装置60具备:帽61,其通过与记录头25的喷嘴所开口的喷嘴面接触从而形成包围喷嘴的封闭空间;以及泵63,其抽吸封闭空间的空气而使封闭空间为负压。可动构件也可以是泵63。根据该构成,能抑制构成作为维护装置60的动力传递机构的维护机构65的齿轮等的破损。维护装置60具备维护机构65作为将电机的动力传递到泵63的动力传递机构的一例。也可以将限制流过电机的电流的限制值设定为泵驱动期间中的至少恒速范围中设定的第二限制值ilim2比输送期间ft中设定的第一限制值ilim1小的值。电机的电流值测定既可以不切换第一切换部90且不使泵63驱动地进行,也可以切换第一切换部90并进行泵63的空抽吸。在此,空抽吸是指在将帽61与记录头25的喷嘴面分离的状态下使泵63驱动的动作。在后者的情况下,在测定电流值时泵63不会被驱动且油墨等液体不会被从记录头25的喷嘴不必要地排出,而且所得到的测定电流值包含泵63和维护机构65的负荷量,因此能设定精度更高的第二限制值ilim2。泵63既可以在输送电机46正转时被驱动,也可以在反转驱动时被驱动。控制部100当进行维护时设定第二限制值ilim2,在泵驱动期间中的至少一部分期间设定比第一限制值ilim1小的第二限制值ilim2。
189.介质输送装置200具备具有帽61和泵63的维护装置60。可动构件也可以是泵63。控制部100使输送电机46向记录介质m被输送时的旋转方向正转驱动来驱动泵63,从而使封闭
空间为负压并进行使液体从喷嘴强制性地抽吸排出的维护。当测定输送电机46的测定电流值imea时,进行不使帽61与喷嘴面接触地使泵63驱动的空吸。根据该构成,输送电机46的测定电流值imea的测定是当空抽吸时进行的。也就是说,测定电流值imea包括包含输送驱动辊43的输送系统的负荷和将泵63驱动的维护系的负荷。因而,能取得还包含维护系统的负荷的精度更高的测定电流值imea。例如,也能仅测定输送系统的负荷,将维护系统的负荷设为推定值,加上包含该推定值的偏移值iof来设定限制值ilim2。在这种情况下,精度降低包含推定值的量。与此相比还能测定作为维护装置60的动力传递机构的维护机构65的负荷,因此能以与负荷相应的更高精度来设定限制值ilim2。因而,能抑制构成作为维护装置60的动力传递机构的维护机构65的齿轮等的破损。
190.具备:多个载置部(供送托盘22a、盒27),其能载置记录介质m;多个供送辊(拾取辊211、供送用辊221),其分别供送载置于多个载置部的记录介质m;以及多个供送机构(第一供送机构70、第二供送机构80),其将输送电机46的动力传递到多个供送辊。控制部100也可以在多个供送辊被驱动的多个供送期间设定不同值的第二限制值ilim2。根据该构成,通过由多个供送机构传递的动力而旋转的多个供送辊分别通过不同的供送路径将记录介质输送到输送驱动辊43为止。多个供送机构各自的构成、供送路径长度、供送路径的形状、供送机构的构成部件的磨损程度等是不同的。因此,输送电机46的负荷根据多个供送机构中的哪一供送机构被选择来供送介质的不同而不同。控制部100按多个供送辊被驱动的供送期间的每一期间来设定不同的值的第二限制值,因此即使负荷按多个供送机构的每一机构而不同,也能抑制当卡纸等异常发生时构成供送机构的齿轮等部件的破损,而且能确保供送辊在供送上所需的转矩。此外,也可以具备多个盒27作为载置部。
191.控制部100取得作为由拾取辊211供送的记录介质m的种类的信息的介质种类信息。也可以设定与介质种类信息相应的不同的值的第二限制值。根据该构成,根据记录介质的种类的不同,记录介质被拾取辊211供送时施加于输送电机46的负荷是不同的。控制部100取得作为由拾取辊211供送的记录介质m的种类的信息的介质种类信息。与该介质种类信息相应地设定不同的值的第二限制值。因而,能与记录介质的种类无关地设定适当的限制值。因而,能更适当地抑制构成作为将动力传递到拾取辊211的动力传递机构的第一供送机构70的齿轮等的破损。
192.可动构件可以是在根据介质种类来调整记录头25与介质支撑构件35之间的间隙的间隙调整机构中设置成能在铅垂方向上移动的记录头25。间隙调整机构通过经由固定于支撑滑架24的导轴的两端部的凸轮机构并用输送电机46的动力使导轴旋转,从而变更滑架24相对于导轴的高度位置。由此,记录头25的高度位置被变更,从而记录头25与介质支撑构件35之间的间隙被调整。根据该构成,能抑制记录头25的高度位置被调整的间隙调整期间内的齿轮破损等。
193.在有将电机设为共用的驱动源的多个可动构件的情况下,在多个可动构件各自的驱动期间设定的各第二限制值可以不同。例如,在供送辊和锁定构件68的各驱动期间中设定的第二限制值的值可以不同。另外,在供送辊和泵的各驱动期间中设定的第二限制值的值可以不同。而且,在供送辊和间隙调整机构中的记录头25的各驱动期间中设定的第二限制值的值可以不同。
194.供送部20和输送部40可以分别被不同的电机驱动。即,记录装置11具备作为供送
部20的驱动源的供送电机和作为输送部40的驱动源的输送电机。当进行供送电机的负荷测定时,若驱动供送电机,则载置于供送托盘22a或者盒27的介质被供送以及输送。因此,优选在用户希望测定时操作操作部并将记录装置11设为测定模式进行测定。为了进行电机的负荷测定而供送介质,因此,能测定包含实际的供送机构的负荷的电机的负荷。因此,通过对该测定电流值加上偏移值,能设定精度高的限制值。
195.在所述实施方式中,将作为供送辊的一例的拾取辊211和锁定构件68设为可动构件,但可动构件也可以仅设为拾取辊211或者仅设为锁定构件68。在前者的情况下,通过在供送期间中的至少一部分期间设定基于测定电流值的第二限制值,从而能抑制供送期间中的齿轮破损等。另外,在后者的情况下,通过在锁定构件68的驱动期间中的至少一部分期间设定基于测定电流值的第二限制值,从而能抑制锁定构件68的驱动期间中的齿轮破损等。
196.电机不限于作为供送辊与输送辊共用的驱动源的构成。也可以是具备独立地驱动供送辊和输送辊的多个电机的构成。
197.将电机设为驱动源的输送辊以外的可动构件不限于拾取辊211和锁定构件68。例如,可动构件也可以是帽61、刮片62、泵63、间隙调整装置中的记录头25、自动驱动式排出托盘机构中的排出托盘、自动盖开闭机构中的排出盖26、操作面板角度调整机构中的操作面板15等。在这些情况下,包含齿轮的动力传递机构按顺序成为帽升降机构、刮片擦拭机构、泵机构、间隙调整机构、托盘驱动机构、盖开闭机构、面板驱动机构。例如,间隙调整机构是调整记录头25的喷嘴所开口的喷嘴面与介质支撑构件35的支撑面35a的间隙的机构。自动驱动式排出托盘机构是通过电机的动力将排出托盘自动推出和收回的机构。自动盖开闭机构是在将收纳于装置主体12内的排出托盘覆盖的关闭状态和使排出托盘露出的打开状态下使盖通过转动或者滑动而打开关闭的机构。操作面板角度调整机构是自动调整操作面板15的姿势角度度的机构。例如,控制部100在电源接通时将操作面板调整为适当的姿势角度,当电源切断时将操作面板调整为收纳时的姿势角度。根据这些构成,通过在可动构件被驱动的期间设定第二限制值ilim2,从而即使由于使用介质输送装置所以施加于电机的负荷发生经时变化,也能设定适当的限制值而有效地抑制构成动力传递机构的齿轮的缺齿等缺陷的发生。
198.可以是设置有驱动供送部20的专用的供送电机的介质输送装置。也就是说,可以是独立地设置有作为供送辊的驱动源的供送电机和作为输送辊的驱动源的输送电机46的构成。在这种情况下,供送电机可以是与输送辊以外的其它可动构件共用的驱动源。并且,控制部100可以通过对供送电机进行电流控制而驱动,将流过驱动中的供送电机的电流值测定为测定电流值imea。在这种情况下,控制部100可以通过对测定电流值imea加上预定的偏移值iof来设定提供给供送电机的电流的限制值。作为其它可动构件,使用在前项中列举的构件。
199.在具备供送电机的构成中,设定限制值的对象的电机可以是供送电机来代替输送电机46。
200.可以设为通过用户对测定模式进行选择操作而转移到测定电机的负荷的负荷测定模式的构成。在这种情况下,可以将切换部切换为连接状态并使作为可动构件的一例的供送辊(例如拾取辊211)驱动。在这种情况下,不对介质m进行记录而仅进行介质m的供送和输送,将电机的电流测定值后的介质m排出到排出托盘。在该电流值测定中,拾取辊211被驱
动,因此能测定供送期间的更准确的负荷。因而,能设定精度更高的限制值(例如第二限制值ilim2)。
201.可以通过将输送辊被驱动的输送期间中设定的限制值即第一限制值ilim1加上在测定电流值imea中预定的偏移值iof从而求出。在这种情况下,限制值既可以是设定第一限制值ilim1和第二限制值ilim2的构成,也可以是仅设定相当于第一限制值ilim1的1个限制值的构成。根据该构成,能抑制在输送辊被驱动的输送期间构成动力传递机构的构成部件的破损等缺陷的发生。
202.可以将第二限制值ilim2设定为比第一限制值ilim1大的值。在这种情况下,能在驱动可动构件的期间抑制齿轮的缺齿。例如,相对于为了抑制构成将输送电机46的动力传递到输送辊的动力传递机构47的齿轮破损等而将限制值一律设定为低固定值的构成,能将第二限制值ilim2设定为基于电机的测定电流值的可变值。因而,在输送辊被驱动的输送期间,不仅能抑制齿轮破损等,而且能确保在可动构件被驱动的期间所需的转矩。此外,优选在可动构件的驱动期间输送辊不被切换部驱动的构成,但即使是输送辊被驱动的构成,由于至少在输送期间中设定比第二限制值小的第一限制值,因此也不容易发生齿轮破损等。
203.进入负荷测定模式的时期不限于记录装置11的电源接通时,也可以是电源接通时并且进入省电力模式前的时期来代替电源接通时。另外,也可以每当电源接通时进行电机的电流值测定(负荷测定)。而且,也可以在电源切断时进行电机的电流值测定。而且,也可以当供送记录对象的记录介质m时进入负荷测定模式,基于在记录对象的记录介质m的供送期间测定的测定电流值imea来设定输送电机46的电流的限制值。在这种情况下,虽然仅在进行最开始使用记录装置11的第一张的记录时无法设定基于测定电流值imea的限制值,但是在进行第二张以后的记录时能设定基于测定电流值imea的限制值。根据该构成,在供送辊已被驱动的状态下能取得测定电流值imea,因此,能基于测定电流值imea来设定精度更高的限制值。
204.第二供送部22可以是作为用户载置相纸等专用纸的载置部的一例具有手动托盘来代替具有料斗的自动供送部的构成。
205.输送部40可以是带输送方式来代替辊输送方式。
206.记录装置11不限于记录部23在扫描方向x上往复移动的串行打印机,也可以是记录部23能在主扫描方向和副扫描方向这两个方向上移动的横动式打印机。而且,记录装置11也可以是行式打印机。
207.记录装置11可以是搭载读取单元的复合机。在这种情况下,介质输送装置可以是读取作为记录介质的一例的原稿的读取装置所具备的装置。另外,介质输送装置可以是具备馈纸方式的读取部的读取专用的扫描仪等读取装置所具备的装置。这样读取装置的介质输送装置具备:供送辊,其供送作为记录介质的一例的原稿;输送辊,其将已被供送的原稿向读取部输送;以及输送电机,其是供送辊与输送辊独立或者共用的驱动源。并且,读取装置具备介质输送装置和读取原稿的图像的读取部。在这种读取装置中,也能通过设定对输送电机的测定电流值加上偏移值而求出的限制值来抑制构成动力传递机构的齿轮等部件的破损。
208.介质m不限于纸张,既可以是挠性的塑料膜、布帛、无纺布等,也可以是层叠体。
209.记录装置11不限于对纸张等介质进行记录的打印机,也可以是对布进行印刷的印
染机。
210.记录装置11不限于喷墨方式,也可以是针式击打式记录装置、热转印式记录装置。
211.记录装置不限于印刷用打印机。例如可以是,喷出功能材料的颗粒被分散或者混合于液体而成的液状体,在作为介质的一例的基板中制造电气配线图案,或者制造液晶、el(electroluminescence:电致发光)以及面发光等各种方式的显示器的像素。
212.在本说明书中,以电机朝向记录头对载置于载置部的记录介质进行记录的记录区域输送时的电机的旋转方向为正转方向,将电机向该正转方向的旋转称为正转。另外,将与电机的正转方向相反的方向的旋转称为反转,将该电机反转的方向称为反转方向。
213.将根据上述实施方式和变更例可掌握的技术思想与其作用效果一起记载如下。
214.(a)介质输送装置是输送记录介质的介质输送装置,并且具备:供送辊,其供送所述记录介质;输送辊,其输送被供送的所述记录介质;电机,其是所述供送辊与所述输送辊的独立或者共用的驱动源;动力传递机构,其将所述电机的动力传递到所述供送辊和输送辊中的至少一方;以及控制部,其对所述电机进行电流控制,所述控制部将所述电机的驱动中的电流值测定为测定电流值,对该测定电流值加上预定的偏移值,从而设定提供给所述电机的电流的限制值。
215.根据该构成,能设定与电机的该时刻的负荷相应的适当的限制值。因此,能抑制通过电机的动力驱动供送辊或输送辊时构成动力传递机构的齿轮等部件的破损等,而且能设定与从记录装置的开始使用的初始阶段到结束耐用期间为止发生经时变化的该时刻的负荷相应的适当的限制值。因而,即使由于使用介质输送装置所以施加于电机的负荷发生经时变化,也能有效地抑制构成动力传递机构的齿轮等部件的破损等缺陷的发生。
216.(b)介质输送装置是输送记录介质的介质输送装置,并且具备:供送辊,其供送所述记录介质;输送辊,其输送被供送的所述记录介质;所述输送辊以外的可动构件;电机;动力传递机构,其将所述电机的动力传递到所述可动构件;以及控制部,其对所述电机进行电流控制,所述控制部将所述电机的驱动中的电流值测定为测定电流值,对该测定电流值加上预定的偏移值,从而设定提供给所述电机的电流的限制值。
217.根据该构成,能设定与电机的该时刻的负荷相应的适当的限制值。因此,能抑制通过电机的动力驱动可动构件时构成动力传递机构的齿轮等部件的破损,而且能设定与从记录装置的开始使用的初始阶段到结束耐用期间为止发生经时变化的该时刻的负荷相应的适当的限制值。因而,即使由于使用介质输送装置所以施加于电机的负荷发生经时变化,也能有效地抑制构成动力传递机构的齿轮等部件的破损等缺陷的发生。
218.(c)也可以在上述介质输送装置中,所述可动构件是所述供送辊,所述电机是所述供送辊与所述输送辊共用的驱动源。根据该构成,能减少电机的部件个数。
219.(d)也可以在上述介质输送装置中,所述控制部将所述电流的限制值设定于对所述动力传递机构施加最大负载的期间,在该期间,将所述电流的限制值设定为比预先设定于该期间以外的期间的第一限制值小的第二限制值。
220.根据该构成,在对构成动力传递机构的齿轮施加最大负载的期间,电流的限制值设定为比该期间以外的期间中设定的第一限制值小的第二限制值。因而,能抑制使可动构件驱动时构成动力传递机构的齿轮等部件的破损等缺陷的发生。
221.(e)也可以在上述介质输送装置中,所述可动构件是所述供送辊,将所述电流的限
制值设定为所述第二限制值的期间是包含所述供送辊被驱动的供送期间中的所述供送辊的最大速度范围的期间。
222.根据该构成,能抑制在供送介质的供送期间中构成动力传递机构的齿轮等部件的破损等缺陷的发生。
223.(f)也可以在上述介质输送装置中具备:第一动力传递机构,其传递通过所述电机的动力旋转的所述输送辊的旋转动力;第二动力传递机构,其将所述第一动力传递机构的旋转动力传递到所述可动构件;以及切换部,其将所述第一动力传递机构和所述第二动力传递机构切换为连接状态和切断状态,所述控制部根据所述切换部的切换状态,在所述可动构件被驱动的期间中的至少一部分期间设定比所述可动构件未被驱动的期间中设定的第一限制值小的第二限制值作为所述电流的限制值。
224.根据该构成,在可动构件被驱动的期间中的至少一部分期间,电机的电流被限制为比可动构件未被驱动时的第一限制值小的第二限制值。因而,能抑制可动构件被驱动时构成动力传递机构的齿轮等部件的破损等缺陷的发生。
225.(g)也可以在上述介质输送装置中,所述可动构件是所述供送辊,所述控制部在所述供送辊被驱动的供送期间,设定比在所述输送辊输送所述记录介质的输送期间中设定的第一限制值小的第二限制值作为所述电流的限制值,将所述切换部从所述连接状态切换为所述切断状态,从而当从所述供送期间切换为所述输送期间时,将所述电流的限制值从所述第二限制值变更为所述第一限制值。
226.根据该构成,当从供送期间切换为输送期间时,从第二限制值向第一限制值变更,因此不仅能抑制供送期间中的齿轮的缺齿等缺陷的发生,而且能在输送期间确保介质的输送所需的大的转矩。例如,能抑制由电机的转矩不足导致的介质的输送位置的偏差。
227.(h)也可以在上述介质输送装置中,具备锁定构件,所述锁定构件在将对所述记录介质进行记录的记录头所设置的滑架锁定于待机位置的锁定位置与使所述滑架以能从待机位置移动的方式解除锁定的锁定解除位置之间移动,所述可动构件是所述锁定构件。
228.根据该构成,能抑制锁定构件被驱动时构成动力传递机构的齿轮等部件的破损等缺陷的发生。
229.(i)也可以在上述介质输送装置中,具备进行所述记录介质的卡纸的恢复操作时被操作的操作部,所述切换部是对所述记录介质进行记录的记录头所设置的滑架移动到在与所述记录介质的输送方向交叉的方向即扫描方向上移动的扫描路径上的规定的切换位置而被切换的结构,所述可动构件是在将所述滑架锁定于待机位置的锁定位置和将所述滑架以能从待机位置移动的方式解除锁定的锁定解除位置之间移动的锁定构件,当所述电机向输送所述记录介质的旋转方向正转驱动时,所述锁定构件从所述锁定位置向所述锁定解除位置移动,所述控制部当检测出所述介质的卡纸时,使所述滑架移动到所述待机位置并待机,并且使所述锁定构件从所述锁定解除位置向所述锁定位置移动,之后,当受理到所述操作部的恢复操作时,在设定了所述第二限制值的基础上,使所述电机正转驱动并使所述锁定构件从所述锁定位置向所述锁定解除位置移动。
230.根据该构成,当发生卡纸而将电机的驱动停止时,使滑架移动到待机位置并且滑架被移动到锁定位置的锁定构件保持于待机位置。之后,进行了将卡纸的介质除去等恢复作业的用户对记录装置进行恢复操作。受理到恢复操作的控制部在将限制值设定为第二限
制值后,使电机正转驱动。因此,即使假设卡纸的记录介质未被除去而电机向与供送时相同的旋转方向正转驱动,提供给电机的电流值也被限制为第二限制值,因此施加于构成动力传递机构的齿轮的负荷得到抑制。因而,在卡纸发生后的恢复动作时能抑制构成动力传递机构的齿轮等部件的破损等缺陷的发生。
231.(j)也可以在上述介质输送装置中,所述控制部当所述滑架的锁定被解除时,将所述电流的限制值从所述第二限制值变更为所述第一限制值。
232.根据该构成,当锁定构件从锁定位置向锁定解除位置移动时,电机被向输送记录介质的方向驱动,但通过设定限制电机的电流的第二限制值,即使假设卡纸的记录介质残留于输送路径上,也能抑制齿轮的缺齿等缺陷的发生。而且,在锁定被解除后,电机的限制值被从第二限制值变更为第一限制值。例如,之后能在锁定构件从锁定解除位置向锁定位置移动的锁定过程中确保比锁定解除过程时更大的转矩。例如,能更可靠地锁定滑架。
233.(k)也可以在上述介质输送装置中具备:多个载置部,其载置所述记录介质;多个所述供送辊,其分别供送载置于多个所述载置部的所述记录介质;以及多个供送机构,其将所述电机的动力传递到多个所述供送辊,所述控制部在多个所述供送辊被驱动的多个所述供送期间设定不同值的所述第二限制值。
234.根据该构成,通过由多个供送机构传递的动力旋转的多个供送辊将记录介质分别通过不同的供送路径输送到输送辊为止。多个供送机构各自的构成、供送路径长度、供送路径的形状、供送机构的构成部件的磨损程度等是不同的。因此,电机的负荷根据多个供送机构中的哪一供送机构被选择且介质被供送的不同而不同。控制部按多个供送辊被驱动的供送期间的每一期间设定不同值的第二限制值,因此即使负荷按多个供送机构的每一机构而不同,也能抑制发生卡纸等异常时构成供送机构的齿轮等部件的破损等缺陷的发生,而且能确保供送辊在供送上所需的转矩。
235.(l)也可以在上述介质输送装置中,所述控制部取得作为由所述供送辊供送的所述记录介质的种类的信息的介质种类信息,根据所述介质种类信息来设定不同值的第二限制值。
236.根据该构成,记录介质被供送辊供送时施加于电机的负荷根据记录介质的种类的不同而不同。控制部取得作为由供送辊供送的记录介质的种类的信息的介质种类信息,根据该介质种类信息来设定不同值的第二限制值。因而,能与记录介质的种类无关地设定适当的限制值。因而,能更适当地抑制构成将动力传递到供送辊的动力传递机构的齿轮等部件的破损等缺陷的发生。
237.(m)也可以在上述介质输送装置中具备维护装置,所述维护装置具有:帽,其通过与对所述记录介质进行记录的记录头的喷嘴所开口的喷嘴面接触从而形成包围所述喷嘴的封闭空间;以及泵,其抽吸所述封闭空间的空气而使该封闭空间为负压,所述可动构件是所述泵。
238.根据该构成,能抑制维护装置的构成动力传递机构的齿轮等部件的破损等缺陷的发生。
239.(n)也可以在上述介质输送装置中具备维护装置,所述维护装置具有:帽,其通过与对所述记录介质进行记录的记录头的喷嘴所开口的喷嘴面接触从而形成包围所述喷嘴的封闭空间;以及泵,其抽吸所述封闭空间的空气而使该封闭空间为负压,所述可动构件是
所述泵,所述控制部通过使所述电机在所述记录介质被输送时的旋转方向上正转驱动来驱动所述泵,从而进行使所述封闭空间为负压并使液体从所述喷嘴强制性地抽吸排出的维护,当测定所述电机的所述测定电流值时,进行在所述帽与所述喷嘴面之间不形成封闭空间地使所述泵驱动的空抽吸。
240.根据该构成,电机的测定电流值的测定是当空抽吸时进行的。也就是说,测定电流值包括包含输送辊的输送系统的负荷和驱动泵的维护系统的负荷。因而,能取得还包含维护系统的负荷的精度更高的测定电流值。例如,还能仅测定输送系统的负荷,将维护系统的负荷设为推定值,加上包含该推定值的偏移值并设为限制值。在这种情况下,精度降低包含推定值的量。与此相比,还能测定维护装置的动力传递机构的负荷,因此,能以与负荷相应的更高精度来设定限制值。因而,能抑制维护装置的构成动力传递机构的齿轮等部件的破损等缺陷的发生。
241.(o)记录装置具备上述介质输送装置和对所述记录介质进行记录的记录头。根据该构成,记录装置具备介质输送装置,因此,能得到与上述介质输送装置同样的作用效果。
242.(p)在介质输送装置的控制方法中,所述介质输送装置具备:供送辊,其供送记录介质;输送辊,其输送被供送的所述记录介质;电机,其是所述供送辊与所述输送辊的独立或者共用的驱动源;动力传递机构,其将所述电机的动力传递到所述供送辊和所述输送辊中的至少一方;以及控制部,其对所述电机进行驱动控制,所述介质输送装置的控制方法包括,通过所述控制部将所述电机的驱动中的电流值测定为测定电流值;以及所述控制部对所述测定电流值加上预定的偏移值,从而设定提供给所述电机的电流的限制值。
243.根据该方法,即使由于使用介质输送装置所以施加于电机的负荷发生经时变化,也能有效地抑制构成动力传递机构的齿轮等部件的破损等缺陷的发生。
244.(q)在介质输送装置的控制方法中,所述介质输送装置具备:供送辊,其供送记录介质;输送辊,其输送被供送的所述记录介质;所述输送辊以外的可动构件;电机;动力传递机构,其将所述电机的动力传递到所述可动构件;以及控制部,其对所述电机进行驱动控制,所述介质输送装置的控制方法包括:通过所述控制部将所述电机的驱动中的电流值测定为测定电流值;以及所述控制部对所述测定电流值加上预定的偏移值,从而设定提供给所述电机的电流的限制值。
245.根据该方法,即使由于使用介质输送装置所以施加于电机的负荷发生经时变化,也能有效地抑制构成动力传递机构的齿轮等部件的破损等缺陷的发生。