1.本发明属于直升机涡轴发动机控制领域,具体涉及一种双发高速直升机变旋翼转速控制方法。
背景技术:
2.直升机靠旋翼旋转产生升力,前飞时,桨叶桨尖速度等于桨叶自身旋转线速度与直升机前飞速度的叠加。随着复合推力新构型直升机的出现与发展,直升机的前飞速度越来越快,前行桨叶桨尖速度也会随之增加,当该值接近马赫数时就会产生激波,导致振动、噪声加剧和需用功率增加等不利影响。
3.为了解决直升机高速飞行时桨尖激波问题,需要在高速前飞状态下,随着前飞速度的增加逐渐降低旋翼转速,以保证桨尖马赫数不超过规定的限制值。
技术实现要素:
4.本发明提供了一种双发高速直升机变旋翼转速控制方法,可以满足高速直升机大速度前飞情况下的使用需求。
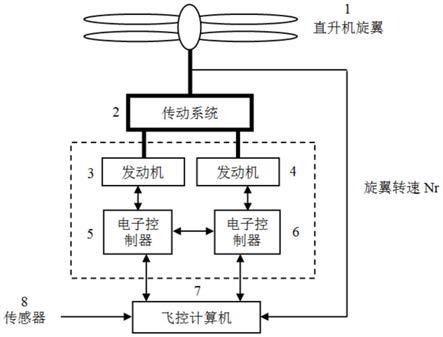
5.技术方案:本技术提供一种双发高速直升机变旋翼转速控制方法,所述方法应用于直升机变旋翼转速控制系统,所述直升机变旋翼转速控制系统包括直升机旋翼1、传动系统2、左发动机3、右发动机4、左电子控制器5、右电子控制器6、飞控计算机7和传感器8,方法包括:
6.确定旋翼额定转速nr0,并计算最大前飞状态下旋翼转速nr1;
7.根据最大前飞状态下旋翼转速nr1和旋翼额定转速nr0,确定直升机旋翼目标转速rnp的变化范围为nr1≤rnp≤nr0;
8.确定满足所述变化范围为nr1≤rnp≤nr0的n个直升机旋翼目标转速rnpn;
9.根据当前的直升机前飞速度v,从n个直升机旋翼目标转速rnpn中确定对应的直升机旋翼目标转速rnp,根据确定的直升机旋翼目标转速rnp,控制发动机的动力涡轮转速np,实时跟随确定的直升机旋翼目标转速rnp。
10.具体的,方法还包括:
11.左电子控制器5采集的直升机旋翼目标转速为rnpa,右电子控制器6采集的直升机旋翼目标转速为rnpb;
12.根据所述rnpa和所述rnpb,计算左电子控制器5和右电子控制器6采集的直升机旋翼目标转速差值|rnp
a-rnpb|;
13.根据所述直升机旋翼目标转速差值|rnp
a-rnpb|确定左电子控制器5和右电子控制器6的动力涡轮转速np。
14.具体的,所述根据直升机旋翼目标转速差值|rnp
a-rnpb|确定左电子控制器5和右电子控制器6的动力涡轮转速np,具体包括:
15.当|rnp
a-rnpb|≤e,则左电子控制器5和右电子控制器6均按(rnpa+rnpb)/2控制发
动机的动力涡轮转速np,其中,e为预设差值。
16.具体的,所述根据直升机旋翼目标转速差值|rnp
a-rnpb|确定左电子控制器5和右电子控制器6的动力涡轮转速np,具体包括:
17.当|rnp
a-rnpb|>e,则左电子控制器5和右电子控制器6均按上一个无故障控制周期的(rnpa+rnpb)/2控制发动机的动力涡轮转速np。
18.具体的,方法还包括:
19.当|rnp
a-rnpb|>e,左电子控制器5或者右电子控制器6向飞控计算机7发送故障信息。
20.具体的,所述计算最大前飞状态下旋翼转速nr1,具体包括:
21.根据(vrmax-vmax)/2πr,计算最大前飞状态下旋翼转速nr1,其中,vrmax为旋翼桨尖最大速度,vmax为直升机最大前飞速度,r为旋翼半径。
22.具体的,确定旋翼额定转速nr0,具体包括:
23.根据直升机旋翼设计参数,确定直升机悬停且低速模式下的旋翼额定转速nr0。
24.具体的,直升机旋翼1通过传动系统2分别与左发动机3和右发动机4连接,左发动机3通过左电子控制器5与飞控计算机7连接,右电子控制器6通过左电子控制器5与飞控计算机7连接,飞控计算机7与传感器8和直升机旋翼1。
25.综上所述,本发明提供的通过控制直升机涡轴发动机动力涡轮变转速实现高速直升机变旋翼转速的技术方法,可以根据高速直升机在大速度前飞状态下的桨尖速度需求逐渐降低旋翼转速,以保证桨尖马赫数不超限。该技术可应用于共轴高速直升机,在不明显增加直升机和发动机重量的情况下,可以按需求降低旋翼转速15%~30%,稳态控制精度
±
0.5%,可以实现高速直升机最大飞行速度超过450km/h。
附图说明
26.图1本技术提供的一种直升机变旋翼转速控制系统的组成图;
27.图2本技术提供的一种变转速控制策略;
28.图3本技术提供的一种发动机动力涡轮变转速控制原理框图。
具体实施方式
29.要实现直升机旋翼转速按需求进行变化,可以从以下两个方面实现:一是直升机传动系统可变传动比,二是发动机动力涡轮可变转速。本发明专利给出一种通过控制直升机涡轴发动机动力涡轮变转速实现上述高速直升机变旋翼转速的技术途径。
30.实施例一
31.如图1所示,为本技术提供的一种直升机变旋翼转速控制系统,所述系统主要包括直升机旋翼1、传动系统2、左发动机3、右发动机4、左电子控制器5、右电子控制器6、飞控计算机7和传感器8等。
32.所述传感器用于采集直升机飞行状态信号,如旋翼转速nr、直升机前飞速度v等;
33.所述飞控计算机7的主要作用是根据直升机飞行状态,通过预设控制律计算出直升机旋翼目标转速rnp,并给定到左电子控制器5和右电子控制器6;
34.所述左电子控制器5和右电子控制器6的主要作用是根据直升机旋翼目标转速
rnp,经闭环控制调整发动机燃油流量wf并作用到发动机,使发动机动力涡轮转速np跟随直升机旋翼目标转速rnp。
35.所述传动系统2的作用是连接两台发动机动力输出轴与直升机旋翼,将动力涡轮扭矩传输到直升机旋翼1,所使用的机械连接使得发动机动力涡轮转速np与直升机旋翼转速nr在固定的传动比下保持一致。
36.实施例二
37.本发明提供了一种双发高速直升机变旋翼转速控制方法,方法包括:
38.步骤101:根据直升机旋翼设计参数,确定直升机悬停且低速模式下的旋翼额定转速nr0;
39.步骤102:根据(vrmax-vmax)/2πr,计算最大前飞状态下旋翼转速nr1,其中,vrmax为旋翼桨尖最大速度,vmax为直升机最大前飞速度,r为旋翼半径;
40.步骤103:根据最大前飞状态下旋翼转速nr1和旋翼额定转速nr0,确定直升机旋翼目标转速rnp的变化范围为nr1≤rnp≤nr0;
41.步骤104:确定满足所述变化范围为nr1≤rnp≤nr0的n个直升机旋翼目标转速rnpn;
42.实际应用中,可以确定与n个直升机前飞速度v对应的直升机旋翼目标转速rnpn。n可以根据直升机飞行品质需求或发动机控制系统精度能力确定,例如,n可以为4。
43.例如,参见图2,在旋翼额定转速nr0和最大前飞状态下旋翼转速nr1之间设定4个直升机旋翼目标转速:v1、v2、v3、v4,选择对应的4个rnp1、rnp2、rnp3、rnp4。其中,rnp1与旋翼额定转速nr0相同,rnp4与直升机最大前飞速度vmax状态下的旋翼转速nr1相同。
44.步骤105:根据当前的直升机前飞速度v,从n个直升机旋翼目标转速rnpn中确定对应的直升机旋翼目标转速rnp,根据确定的直升机旋翼目标转速rnp,控制发动机的动力涡轮转速np,实时跟随确定的直升机旋翼目标转速rnp;
45.步骤106:左电子控制器5采集的直升机旋翼目标转速为rnpa,右电子控制器6采集的直升机旋翼目标转速为rnpb;
46.步骤107:根据所述rnpa和所述rnpb,计算左电子控制器5和右电子控制器6采集的直升机旋翼目标转速差值|rnp
a-rnpb|;
47.步骤108:当|rnp
a-rnpb|≤e,则左电子控制器5和右电子控制器6均按(rnpa+rnpb)/2控制发动机的动力涡轮转速np,其中,e为预设差值;
48.当|rnp
a-rnpb|>e,则左电子控制器5和右电子控制器6均按上一个无故障控制周期的(rnpa+rnpb)/2控制发动机的动力涡轮转速np,同时申报故障。
49.其中,预设差值e为6%。
50.实施例三
51.控制策略设计:
52.a)变旋翼转速策略及实施步骤
53.本发明专利的一个显著特点是直升机在大速度前飞状态下,旋翼转速nr随飞行速度的增加而实时调整,具体实施方法和控制策略如下:
54.1.根据直升机旋翼设计参数确定直升机悬停、低速模式下的旋翼额定转速nr0;根据旋翼设计参数以及桨叶翼型确定旋翼桨尖最大速度vrmax;
55.2.根据(vrmax-vmax)/2πr,计算最大前飞状态下旋翼转速nr1,其中,vrmax为旋翼桨尖最大速度,vmax为直升机最大前飞速度,r为旋翼半径;旋翼桨尖速度vr、直升机前飞速度v的矢量和的模应小于旋翼桨尖最大速度vrmax,即|v+vr|≤vrmax,当前飞状态下前行桨尖速度与前飞速度方向一致,矢量和的模达到最大,旋翼桨尖速度vr和旋翼转速nr的关系为vr=2πnr
·
r;
56.3.根据最大前飞状态下旋翼转速nr1和旋翼额定转速nr0,确定直升机旋翼目标转速rnp的变化范围为nr1≤rnp≤nr0;
57.4.直升机旋翼目标转速rnp的确定与直升机前飞速度v直接相关,两者对应关系按图2所示设定。
58.b)发动机动力涡轮变转速控制
59.本发明专利的另外一个主要特点是发动机按照直升机飞控指令实时控制动力涡轮转速np跟随直升机旋翼目标转速rnp。发动机控制原理见图3,其主要特点如下:
60.1.发动机控制系统采用闭环控制,主要特点之一为:所述系统以直升机旋翼目标转速rnp为控制目标,控制发动机动力涡轮转速np实时跟随直升机旋翼目标转速rnp。发动机在进入飞行状态后,实时接收来自飞控计算机7的直升机旋翼目标转速rnp,并将直升机旋翼目标转速rnp与采集的实际发动机动力涡轮转速np值之差作为控制输入,经pid控制器,转换成可作用于发动机的燃油流量wf,实现发动机变转速控制;
61.2.由于直升机采用变转速旋翼转速控制,由直升机旋翼1、传动系统2、左发动机3和右发动机4组成的传动链形成的扭振系统在不同转速下具有可变的扭振频率特性,因此所述系统的另一个主要特点为:结合发动机主动控制目标,采用具有自适应扭振抑制能力的陷波滤波算法,其主要技术特点是:在发动机动力涡轮转速np反馈回路中串入滤波器,针对不同转速下的发动机动力涡轮转速np采集值固有频点进行滤波,在控制器之前滤除扭振信号,控制器可选择更高的增益,从而获得更好、更快速的控制性能。
62.c)直升机旋翼目标转速rnp信号故障处置策略
63.直升机旋翼目标转速rnp是所述系统的关键信号,本发明所述的高速直升机采用双发构型,一个显著特点是采用模拟量和数字通讯相结合的信号传输方式,另外通过双发一致性判断机制,以提高双发匹配性和高系统可靠性,具体实施策略如下:
64.1.飞控计算机7分别同时给左电子控制器5和右电子控制器6发送模拟电压量,用于表征直升机旋翼目标转速rnp。电压量范围为0~10v,与直升机旋翼目标转速rnp按线性关系设定;
65.2.飞控计算机7分别同时给左电子控制器5和右电子控制器6发送数字通讯量直升机旋翼目标转速rnp信号;
66.3.电子控制器优先采用模拟量,当模拟量判故时,采用通讯量作为备份;双发实时地进行直升机旋翼目标转速rnp信号一致性判断,具体方法为:在一个控制周期内,设左电子控制器5接收值为rnpa,右电子控制器6接收值为rnpb。双发通过实时通讯,当|rnp
a-rnpb|≤6%,则双发均按(rnpa+rnpb)/2进行控制;当|rnp
a-rnpb|>6%,则左电子控制5和右电子控制器6均按上一个无故障控制周期的(rnpa+rnpb)/2进行控制,同时申报故障。
67.1)本发明的优点:
68.与现有技术相比,本发明有以下几个优点及创新之处:
69.a)本发明提供了一种通过控制涡轴发动机动力涡轮变转速实现高速直升机变旋翼转速的方法,与变传动比相比,能够大幅减小传动系统的研制难度,降低直升机重量;
70.b)本发明实现直升机变旋翼转速,转速变化策略与直升机前飞速度关联,可以有效解决高速直升机大速度前飞桨尖马赫数限制的难题,进一步提升直升机最大前飞速度;
71.本发明提出的直升机旋翼目标转速信号双发一致性判断机制以及故障策略,可以有效解决双发乃至多发直升机变转速过程中存在功率匹配和控制一致性问题。
72.技术效果:
73.本发明提供的通过控制直升机涡轴发动机动力涡轮变转速实现高速直升机变旋翼转速的技术方法,可以根据高速直升机在大速度前飞状态下的桨尖速度需求逐渐降低旋翼转速,以保证桨尖马赫数不超限。该技术可应用于共轴高速直升机,在不明显增加直升机和发动机重量的情况下,可以按需求降低旋翼转速15%~30%,稳态控制精度
±
0.5%,可以实现高速直升机最大飞行速度超过450km/h。