1.本发明涉及平流层飞行器技术领域,尤其涉及一种航向可调式平流层气球。
背景技术:
2.近年来,各国都在开展研究各类平流层飞行器。平流层气球是一种新型低成本、低能耗平流层飞行器,但是传统的平流层气球动力系统多采用螺旋桨方式,这种方式的缺点是平流层空气稀薄,螺旋桨效率低,姿态控制难,能源需求高和能耗高。
3.目前,有必要提供一种航向可调式平流层气球。
技术实现要素:
4.本发明的目的在于提供一种利用风场调节航向的航向可调式平流层气球,其具有能耗低和结构简单的优点。
5.为了实现上述目的,本发明提供的航向可调式平流层气球包括上囊体、上传感机构、下囊体、下传感机构、调距装置和控制装置,所述上传感机构设于所述上囊体,所述下传感机构设于所述下囊体,所述调距装置连接于所述上囊体与所述下囊体之间,所述调距装置用于调节所述上囊体与所述下囊体之间的间距,所述控制装置分别与所述上传感机构、下传感机构和调距装置电性连接。
6.较佳地,所述调距装置包括安装座、电源、驱动电机、转轴和绳索,所述安装座安装于所述下囊体的顶部,所述电源、驱动电机与所述转轴安装于所述安装座,所述绳索的一端与所述上囊体的底部连接,所述绳索的另一端缠绕于所述转轴,所述电源与所述驱动电机电性连接,所述转轴安装于所述驱动电机的输出端,所述转轴在所述驱动电机的驱动下转动并收放所述绳索。
7.具体地,所述的航向可调式平流层气球还包括碳纤维架和太阳能电池板,所述碳纤维架包覆于所述安装座外,所述太阳能电池板内嵌于所述碳纤维架。
8.具体地,所述绳索为碳纤维绳。
9.较佳地,所述上传感机构包括上风速风向传感器和上无线电高度表,所述上风速风向传感器和所述上无线电高度表均呈间隔开地设于所述上囊体。
10.较佳地,所述下传感机构包括下风速风向传感器和下无线电高度表,所述下风速风向传感器和所述下无线电高度表均呈间隔开地设于所述下囊体。
11.较佳地,所述上囊体为耐压性囊体。
12.较佳地,所述下囊体为耐压性囊体。
13.较佳地,所述控制装置包括飞控计算机、定位装置、通讯装置和承载架,所述承载架与所述下囊体连接,所述飞控计算机、定位装置、通讯装置均安装于所述承载架,所述定位装置和所述通讯装置均与所述飞控计算机电性连接,所述上传感机构、下传感机构和调距装置均与所述飞控计算机电性连接。
14.为了实现上述目的,本发明提供的航行方法,包括如下步骤:
15.(s1)建立上述的航向可调式平流层气球,规划所述航向可调式平流层气球飞行航向;(s2)所述上传感机构和所述下传感机构将获得的高度及风速风向数据通过通讯装置发送给地面站;(s3)地面站将获得的实时数据与往年高空风场数据库的信息进行比对;(s4)比对结果通过地面站分析运算后得出气球航向调节方案;(s5)地面站将调节方案发送给飞控计算机;(s6)飞控计算机按照调节方案发送给所述调距装置相应的动作指令;(s7)所述调距装置按动作指令收放所述绳索,在此期间,所述上传感机构和所述下传感机构将各高度实时风场数据通过通讯装置发送给地面站,所述调距装置工作完成后,验证所述航向可调式平流层气球的实际航向与规划航向的一致性;(s8)若实际航向与规划航向相符,则此次航向调节完成;(s9)若实际航向与规划航向不相符,则地面站根据所述调距装置工作过程中获取到的各高度实时风场数据分析运算后得出新的气球航向调节方案;(s10)重复上述步骤直到实际航向与规划航向一致。
16.与现有技术相比,本发明的航向可调式平流层气球通过将上囊体、上传感机构、下囊体、下传感机构、调距装置和控制装置等结合在一起,上传感机构设于上囊体,从而感知上囊体所处环境的风速以及高度,下传感机构设于下囊体,从而感知下囊体所处环境的风速以及高度,调距装置连接于上囊体与下囊体之间,调距装置用于调节上囊体与下囊体之间的间距,控制装置分别与上传感机构、下传感机构和调距装置电性连接,控制装置通过反馈的信息调节上囊体与下囊体之间的间距,利用不同高度的风场作用,来实现平流层气球的定向移动,摒弃了以往常规气球繁琐的螺旋桨动力系统和复杂的航电控制系统,具有结构简单,易于控制,能源需求低的优点,大大提高的平流层气球的可操控性及高空驻留能力。
附图说明
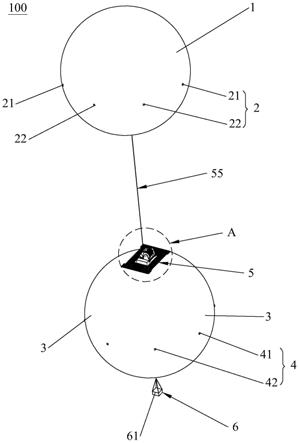
17.图1是本发明的航向可调式平流层气球的立体结构示意图。
18.图2是图1中a处的局部放大图。
具体实施方式
19.为详细说明本发明的技术内容、构造特征、所实现的效果,以下结合实施方式并配合附图详予说明。
20.请参阅图1至图2,本发明提供一种航向可调式平流层气球100,其包括上囊体1、上传感机构2、下囊体3、下传感机构4、调距装置5和控制装置6,上传感机构2设于上囊体1,从而感知上囊体1所处环境的风速以及高度,下传感机构4设于下囊体3,从而感知下囊体3所处环境的风速以及高度,上囊体1与下囊体3充气后均具有向上的漂浮力,填充的气体可以为氢气等气体,上囊体1位于下囊体3的上方,调距装置5连接于上囊体1与下囊体3之间,调距装置5用于调节上囊体1与下囊体3之间的间距,控制装置6分别与上传感机构2、下传感机构4和调距装置5电性连接,控制装置6通过反馈的信息调节上囊体1与下囊体3之间的间距,利用不同高度的风场作用来实现平流层气球的定向移动,摒弃了以往常规气球繁琐的螺旋桨动力系统和复杂的航电控制系统,具有结构简单,易于控制,能源需求低的优点,大大提高的平流层气球的可操控性及高空驻留能力。更为具体地,如下:
21.请参阅图1至图2,本发明的航向可调式平流层气球100还包括碳纤维架7和太阳能
电池板8。调距装置5包括安装座51、电源52、驱动电机53、转轴54和绳索55,安装座51安装于下囊体3的顶部,电源52、驱动电机53与转轴54安装于安装座51,绳索55的一端与上囊体1的底部连接,绳索55的另一端缠绕于转轴54,电源52与驱动电机53电性连接,转轴54安装于驱动电机53的输出端,转轴54在驱动电机53的驱动下转动并收放绳索55,从而通过绳索55的收放调节上囊体1与下囊体3之间的间距。碳纤维架7包覆于安装座51外,太阳能电池板8内嵌于碳纤维架7,碳纤维架7具有强度高和质量轻的优点。较佳地,绳索55为碳纤维绳,但不限于此。太阳能电池板8处设有用于管理的mppt能源管理系统,但不限于此。
22.请参阅图1至图2,上传感机构2包括上风速风向传感器21和上无线电高度表22,上风速风向传感器21呈间隔开地设于上囊体1,下传感机构4包括下风速风向传感器41和下无线电高度表42,下风速风向传感器41呈间隔开地设于下囊体3。较佳地,上囊体1为耐压性囊体,从而满足航天的条件,但不限于此。较佳地,下囊体3为耐压性囊体,从而满足航天的条件,但不限于此。
23.请参阅图1至图2,控制装置6包括飞控计算机(图未示)、定位装置(图未示)、通讯装置(图未示)和承载架61,承载架61与下囊体3连接,飞控计算机、定位装置、通讯装置均安装于承载架61,定位装置和通讯装置均与飞控计算机电性连接,定位装置和通讯装置共同反馈气球的位置,上传感机构2、下传感机构4和调距装置5均与飞控计算机电性连接,上传感机构2和下传感机构4均将相应的信息反馈到飞控计算机处,从而通过反馈的信息控制调距装置5的工作,控制装置6通过反馈的信息调节上囊体1与下囊体3之间的间距,利用不同高度的风场作用来实现平流层气球的定向移动。
24.综上所述,请参阅图1至图2,对本发明的航向可调式平流层气球100的生产过程做一详细说明:
25.(s1)建立上述的航向可调式平流层气球,规划航向可调式平流层气球100飞行航向;
26.(s2)上传感机构2和下传感机构4将获得的高度及风速风向数据通过通讯装置发送给地面站;
27.(s3)地面站将获得的实时数据与往年高空风场数据库的信息进行比对;
28.(s4)比对结果通过地面站分析运算后得出气球航向调节方案;
29.(s5)地面站将调节方案发送给飞控计算机;
30.(s6)飞控计算机按照调节方案发送给调距装置5相应的动作指令;
31.(s7)调距装置5按动作指令收放绳索55,在此期间,上传感机构2和下传感机构4将各高度实时风场数据通过通讯装置发送给地面站,调距装置5工作完成后,验证航向可调式平流层气球100的实际航向与规划航向的一致性;
32.(s8)若实际航向与规划航向相符,则此次航向调节完成;
33.(s9)若实际航向与规划航向不相符,则地面站根据调距装置5工作过程中获取到的各高度实时风场数据分析运算后得出新的气球航向调节方案;
34.(s10)重复上述步骤直到实际航向与规划航向一致。
35.通过将上囊体1、上传感机构2、下囊体3、下传感机构4、调距装置5和控制装置6等结合在一起,上传感机构2设于上囊体1,从而感知上囊体1所处环境的风速以及高度,下传感机构4设于下囊体3,从而感知下囊体3所处环境的风速以及高度,调距装置5连接于上囊
体1与下囊体3之间,调距装置5用于调节上囊体1与下囊体3之间的间距,控制装置6分别与上传感机构2、下传感机构4和调距装置5电性连接,控制装置6通过反馈的信息调节上囊体1与下囊体3之间的间距,利用不同高度的风场作用,来实现平流层气球的定向移动,摒弃了以往常规气球繁琐的螺旋桨动力系统和复杂的航电控制系统,具有结构简单,易于控制,能源需求低的优点,大大提高的平流层气球的可操控性及高空驻留能力。
36.以上所揭露的仅为本发明的较佳实例而已,当然不能以此来限定本发明之权利范围,因此依本发明申请专利范围所作的等同变化,仍属于本发明所涵盖的范围。