1.本发明属于桥梁检测技术领域,尤其是涉及一种桥梁无人取样检测平台。
背景技术:
2.随着我国公路、市政桥梁事业的发展,新建高公路及市政桥梁越来越多,同时既有的许多桥梁亦逐渐进入了养护维修阶段,有关专家认桥梁使用超过25年以上则进入老化期。桥梁在长期运营过程中不可避免会产生各种结构性损伤, 桥梁的结构承载能力和耐久性逐步降低,直至影响到桥梁的运营安全。为了保证桥梁结构的安全使用, 桥梁结构的检测工作也日益凸现出它的必要性和重要性。
3.现有的检测方式基本靠桥梁检测车将技术人员送到指定位置,技术人员手持检测设备对桥梁进行检测和取样,但因桥梁检测车的质量及结构问题,该方式易发生意外事故,危及技术人员的人身安全;现有技术中也有用无人机检测的设备,该技术使用摄像机检测裂缝大小,因无人机不能接触桥梁,这种设备无法对桥梁本身进行直接的结构检测以及混凝土取样等,不能完整地检测桥梁各方面的性能;随着需要检测维护的桥梁越来越多,对检测设备安全性及检测效率的考量越来越重要。
技术实现要素:
4.本发明为了克服现有技术的不足,在现有的桥梁检测检测技术的基础上进行了改进,提供一种无接触式的、稳定工作且可搭载多种检测装备的桥梁无人取样检测平台。
5.为了实现上述目的,本发明采用以下技术方案:一种桥梁无人取样检测平台,包括第一移动装置、与第一移动装置相连的无人机、与无人机相连的第二移动装置、位于无人机上的多个摄像机;其特征在于:所述第一移动装置包括壳体、固定在壳体内部的多个滚轮、固定在壳体内部的负压风机、固定在壳体上的引导柱、与壳体相连的金属罩、与金属罩相连的支撑板、位于支撑板上的多个弹性柱体、与弹性柱体相连的密封板;第一移动装置与无人机铰接;弹性柱体底部设有第一弹簧,柱体穿插在支撑板的开孔内,可在孔内沿垂直于支撑板端面的方向移动;工作时,无人机飞行靠近桥墩或桥身底部,摄像机对飞行路径周边进行监控,找到裂缝或寻找检测取样点;如果待检测点在桥身底部,在无人机升力的作用下,第一移动装置及第二移动装置与桥底接触,负压风机工作,使本发明吸附在桥底;如果待检测点在桥墩侧面,则无人机转向倾斜使引导柱与桥墩接触,引导柱为柔性材料,接触时对桥墩无损伤;无人机倾斜移动过程中,第一移动装置绕与无人机的铰接点旋转直至与桥墩贴合,无人机在压力差的作用下逐渐与桥墩面平行,第二移动装置紧接着与桥墩贴合;贴合后负压风机工作,使整个桥梁无人取样检测平台吸附在桥墩侧面上;壳体与金属罩,金属罩与支撑板以及密封板与金属罩之间作密封处理,密封板由柔性材料制成,可产生变形,遇到与桥梁的接触面有凸起或凹面时,弹性柱体会挤压密封板使其与桥梁紧密贴合,同时弹性柱体可缓冲掉安装在检测平台上的各种检测设备工作时产生的冲击,保证壳体内部的密封性;滚轮转动使本发明可在桥面上移动,移动过程中金属罩与桥面接触,铲掉桥面上的尖锐处
及赃物,避免刮坏密封板影响吸附效果。
6.所述第二移动装置包括排气通道、位于排气通道内的推杆、设于排气通道上的排气口、位于排气通道内的第二弹簧;第二移动装置的主体结构和在墙面上吸附与移动的原理与第一移动装置相同,但是没有引导柱;当负压风机工作时,在气压推动下排气口打开,推杆不与墙面接触,当本发明需要离开竖直的桥墩面时,第二移动装置内的负压风机停止工作,在第二弹簧作用下推杆复位接触桥墩,桥墩反推第二移动装置使其脱离桥墩,进而使本发明整体脱离桥面完成检测。
7.所述无人机包括与第一移动装置相连的基座、固定在基座上的多个螺旋桨、固定在基座底部的支撑、设于基座上的挡板、设于基座上的检测平台、固定在基座上的多个导轨、与第一移动装置相连的多个第一弹簧;所述检测平台包括固定在基座上的马达、与马达相连的齿轮、位于基座上的平板、固定在平板上的齿条;螺旋桨旋转产生的升力使本发明能在空中移动至待检测位置,当第一移动装置及第二移动装置在桥面上移动时,由于桥面上的不平整,壳体内部的密封性会降低,吸附能力减弱,此时螺旋桨旋转,产生的压力差使第一移动装置及第二移动装置能紧密贴合桥面,避免本发明脱离桥面而坠毁;当检测工作完成后,第二移动装置脱离桥面,并带动无人机绕与第一移动装置的铰接点旋转,直至第一移动装置的底面与挡板接触,此时无人机处于水平状态,固定在基座上的多个第一弹簧受力拉伸;之后螺旋桨旋转产生升力,同时第一移动装置的负压风机停止工作,在第一弹簧拉力的作用下脱离桥面并旋转至水平状态,螺旋桨工作将本发明移动至下一检测点;在实际操作中,平板上可选择安装裂缝宽度观测仪,钢筋锈蚀仪,保护层厚度探测仪,回弹仪,碳化深度测试工具,喷粉枪等检测设备,用于对桥梁的结构检测以及标记;由于第一移动装置及第二移动装置在桥面上移动时吸附力会减弱
ꢁ
,而螺旋桨工作时又有震动,因此平台上安装的检测设备工作时第一移动装置及第二移动装置应在桥面上保持静止,以对检测设备提供更大的支撑力;马达工作带动齿轮转动,在齿轮齿条传动下,平板在导轨上平稳移动,使检测平台可在基座上横向滑动,保证平台上检测设备能平稳完成多点检测和标记检测点。
8.综上所述,本发明具有以下优点:在现有无人机拍照检测的基础上,增加了可在桥面上移动的装置,使本发明能完成大部分的桥梁检测及混凝土取样工作,实用性相比无人机拍照检测技术更强;本发明具有缓冲结构,在进行检测时本发明能稳定地吸附于桥面,提供给检测设备支撑力,工作平稳;而相对于现有的使用桥梁检测车进行人工检测的方式,本发明采用无接触式的检测方式,有效避免安全事故的发生。
附图说明
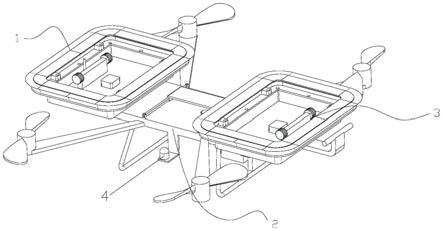
9.图1为本发明的结构示意图。
10.图2为图1中第一移动装置的结构爆炸图。
11.图3为图1中第一移动装置的左视图。
12.图4为图3沿线e-e的等轴测剖面图。
13.图5为图4中a部分的局部放大图。
14.图6为图2中弹性柱体的结构示意图。
15.图7为图1中第二移动装置的俯视图。
16.图8为图7沿线f-f的剖面图。
17.图9为图8中b部分的局部放大图。
18.图10为图1中无人机的结构示意图。
19.图11为图1中无人机的仰视图。
具体实施方式
20.为了使本技术领域的人员更好的理解本发明方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述。
21.如图1-11示,一种桥梁无人取样检测平台,包括第一移动装置1、与第一移动装置相连的无人机2、与无人机相连的第二移动装置3、位于无人机上的检测平台4、位于无人机上的多个摄像机4;其特征在于:所述第一移动装置包括壳体11、固定在壳体内部的多个滚轮12、固定在壳体内部的负压风机13、固定在壳体上的引导柱14、与壳体相连的金属罩15、与金属罩相连的支撑板16、位于支撑板上的多个弹性柱体17、与弹性柱体相连的密封板18;第一移动装置1铰接在无人机2的一端;弹性柱体17底部设有第一弹簧172,第一弹簧限制在弹性柱体的第一凸面171下方,弹性柱体可在支撑板16的开孔内沿垂直于支撑板端面的方向移动;密封板18由柔性材料制成,具体为橡胶或牛筋板,可产生局部变形,具有良好的密封性;密封板的横截面有t形槽,弹性柱体顶部的第二凸面173穿插在t形槽内,使密封板可与弹性柱体一起移动;工作时,无人机2飞行靠近桥墩或桥身底部,摄像机4对飞行路径周边进行监控,找到裂缝或寻找检测取样点;如果待检测点在桥身底部,在无人机升力的作用下,第一移动装置1及第二移动装置2与桥底接触,负压风机13工作,使本发明吸附在桥底;如果待检测点在桥墩侧面,则无人机2转向倾斜使引导柱14与桥墩接触,导向柱为圆柱杆件,与桥面接触时其圆环面与桥面贴合,导向柱表面包覆有橡胶,接触时对桥墩无损伤;无人机倾斜移动过程中,第一移动装置1绕与无人机的铰接点旋转直至与桥墩贴合,无人机在压力差的作用下逐渐与桥墩面平行,第二移动装置3紧接着与桥墩贴合;贴合后负压风机13工作,使第一移动装置与第二移动装置吸附在桥墩侧面上;壳体11与金属罩15,金属罩15与支撑板16以及密封板18与金属罩15之间作密封处理,密封板遇到桥梁有凸起或凹面时产生变形,同时弹性柱体17会挤压密封板使其与桥梁紧密贴合,弹性柱体底部的第一弹簧172还可缓冲掉安装在检测平台上的各种检测设备工作时产生的冲击,使密封板18始终贴合桥面,保证壳体11内部空间的密封性;滚轮12转动使本发明可在桥面上移动,滚轮表面包覆有橡胶,以增强与桥面的摩擦同时避免刮坏桥面;移动过程中金属罩15与桥面接触,铲掉桥面上的尖锐处及赃物,避免刮坏密封板18而影响吸附效果。
22.所述第二移动装置3包括排气通道31、位于排气通道内的推杆32、设于排气通道上的排气口33、位于排气通道内的第二弹簧34;第二移动装置3的主体结构和在墙面上吸附与移动的原理与第一移动装置1相同,但是没有引导柱14;推杆32一端位于排气通道31内,与排气通道的接触面设有密封圈,另一端伸入壳体内部;当负压风机工作时,在气压推动下推杆32向外移动使排气口33与排气通道31连通,第二弹簧34收缩,负压风机对第二移动装置3内部抽空气使其吸附在桥面,此时推杆不与桥面接触,当本发明需要离开竖直的桥墩面时,第二移动装置内的负压风机停止工作,在第二弹簧34的作用下推杆32复位并接触桥墩,桥墩反推第二移动装置使其脱离,进而使本发明整体脱离桥面,完成检测并移动到下一检测点。
23.所述无人机2包括与第一移动装置1相连的基座21、固定在基座上的多个螺旋桨22、固定在基座底部的支撑23、设于基座上的挡板25、设于基座上的检测平台27、固定在基座上的多个导轨26、与第一移动装置1相连的三个第一弹簧24;所述检测平台27包括固定在基座上的马达274、与马达相连的齿轮273、位于基座21上的平板271、固定在平板上的齿条272;导轨26为圆柱杆件,共四根,成两列固定在基座21上,以使检测平台27稳定在导轨上;第一弹簧24一端固连在壳体11底部,第一移动装置1贴合桥墩的过程中第一弹簧拉动无人机2以加速贴合过程;第一移动装置1及第二移动装置3在桥面上移动时螺旋桨22工作,通过改变螺旋桨两端的压力差的方式使本发明在桥面上能平稳移动,不至于坠落;当检测工作完成后,第二移动装置3脱离桥面,并带动无人机2绕与第一移动装置1的铰接点旋转,直至第一移动装置的底面与挡板25接触,此时无人机处于水平状态,第一弹簧24受力拉伸;之后负压风机13停止工作,
ꢁ
在第一弹簧24的作用下脱离桥面并旋转至与基座21贴合,螺旋桨22工作将本发明移动至下一检测点;马达274固定在基座21底面,齿轮273与齿条272啮合,通过齿轮齿条的传动,平板271上安装的检测设备和标记装置可横向运动,配合第一移动装置1和第二移动装置3的运动,完成对桥墩的多点检测及取样。
24.优选的,所述负压风机13应选用大流量、低转速的的规格,这种负压风机具有压力稳定、振动小的特点,有很强的吸附效果,同时较小的振动对桥梁本身的损害小,适用于本发明对负压风机的要求;本发明的动力源为电池,与现有无人机的动力源相同。
25.本发明具体的工作流程为:螺旋桨22工作将本发明移动至指定位置,若检测位置为桥底,则无人机2水平上升,使第一移动装置1和第二移动装置3贴合墙面,若检测位置为桥墩,则引导柱14与桥面接触,无人机倾斜,第一移动装置绕与基座21的铰接点旋转直至贴合桥面,无人机在压力差及第一弹簧24的作用下逐渐与桥墩面平行,第二移动装置3紧接着与桥墩贴合;第一移动装置1以及第二移动装置3与桥面贴合后,负压风机13工作,使本发明与桥面紧密贴合;之后滚轮12带动本发明移动至检测位置,移动过程中螺旋桨22转动以加强吸附作用;到达检测位置后螺旋桨停转,平板47上安装的检测设备对桥面进行检测和取样,期间可通过马达274工作及齿轮齿条传动使检测设备移动位置,实现多点检测,每一检测点的检测过程中第一移动装置1以及第二移动装置3在桥面上保持静止,使负压风机13产生的吸附作用足够用于制成检测设备完成工作;检测完成后第二移动装置内的负压风机停止工作,推杆32在第二弹簧34的作用下复位并对桥面施压,使第二移动装置脱离桥面,进而使无人机2绕与第一移动装置1的铰接点旋转,直至挡板25与壳体11底面接触,第一移动装置内的负压风机13停转,第一移动装置在第一弹簧24的作用下脱离墙面至原位状态,螺旋桨22转动,使本发明浮空,完成对某一桥面检测。