1.本发明涉及一种探测器弹道升力式火星进入的方法,适用火星着陆、巡视探测任务,属于航天器edl技术领域。
背景技术:
2.1)火星大气进入方式
3.基于目前的技术能力,火星大气进入方式主要有弹道式和弹道升力式两种。不同的进入方式直接影响进入器系统功能、配置、过载、防热、开伞高度、落点精度等诸多方面设计状状态。
4.弹道式:进入器进入火星大气层后只产生阻力,不产生升力,升阻比为0。
5.弹道升力式:在弹道进入的基础上,通过配置质心方法使进入器在进入火星大气层时产生配平攻角,从而产生一定的升力,升阻比一般不超过0.5。
6.2)火星大气条件
7.火星大气条件主要包括大气密度、温度、风速、光深、尘暴、火星尘等,主要影响大气进入过程的参数为大气密度、温度和风速。由于火星自身特性以及人类对火星认知的不足,火星大气条件还具有很大的不确定性。
8.火星大气层非常稀薄,主要成分为:二氧化碳(95.3%),氮气(2.7%),氩(1.6%)以及极少量的氧(1.5%)和水(0.03%)。火星表面的平均气压大约为640pa,小于地球气压的1%。火星稀薄的大气层产生的温室效应较弱,仅能使其表面的温度上升5k,这要小于金星的500k和地球的33k。根据历次火星探测任务统计,对火星大气密度的估计偏差约为
±
10%~
±
75%,对火星大气温度的估计偏差约为-15k~+18k。
9.火星表面的风变化剧烈,风的一部分是由常规大气循环(因而随季节和本地气候变化)决定,同时主要由地区和本地环境控制,包括地形、反照率和热惯性的影响。
10.3)现有的弹道升力式进入方案
11.从国外成功的火星着陆任务看,mpf、mer和phoenix任务均采用了弹道式进入方式。
12.viking、msl和毅力号采用了“弹道-升力式”进入方式,但两者有本质区别。viking没有制导,对升力的大小和方向不加以控制和利用,其采用升力式构型是由于作为美国首次火星着陆任务,基于降低任务风险,使进入轨迹平缓,降低热流密度峰值等提高生存能力,但代价是着陆精度大大降低。msl是国际首个采用“弹道升力”式进入和控制的火星探测器,通过控制倾侧角控制实现了较高着陆精度。毅力号与msl进入方式类似,不同的是毅力号采用了图像匹配制导。
13.msl的edl过程主要事件如下:
14.(1)巡航级分离
15.2012年8月6日05:14:34(utc),探测器在进入大气前10min与巡航级分离。
16.(2)准备进入火星大气
17.进入前9min,背罩上推进器点火建立大气进入姿态。
18.(3)第一次释放配重块
19.建立大气进入姿态下,背罩分离出两个固体钨合金配重,每个重量为75kg,使进入器质心位置偏离对称轴,从而使得进入器在进入大气层时产生配平攻角。
20.(4)制导式大气进入
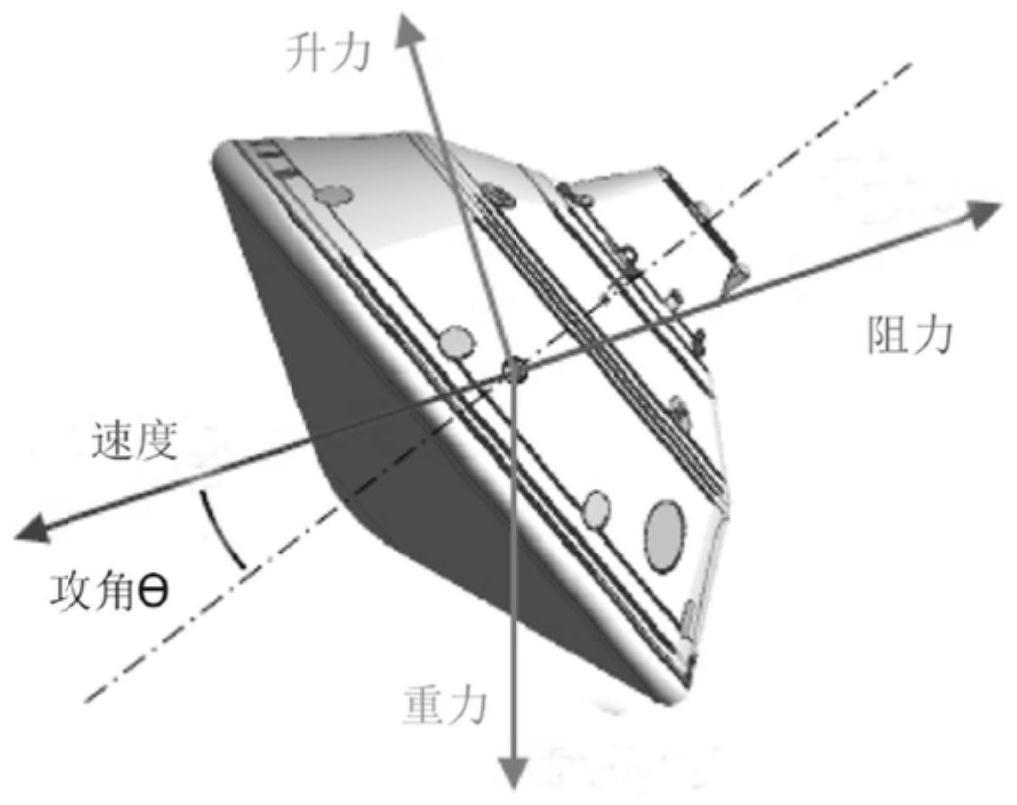
21.msl采用线性进入制导律,该制导律基于eptc(entry terminal point controller)制定双段定常倾斜角制导的参考轨迹,追踪阻力加速度与高度变化率,并通过姿态控制系统改变升力矢量以调整攻角。msl运动及姿态分析如图1所示。进入火星大气前,msl通过地面测控站获取初始导航参数,利用巡航级星敏感器获取惯性姿态,为惯性导航提供初值。进入大气后,gnc分系统通过惯性测量单元得到当前着陆器的速度、阻力加速度,并与目标值期望值,确定目标倾侧角,完成参考轨迹跟踪,同时通过倾侧角反转来调节横程。进入段制导分为两段:包括航程控制和横程控制。当进入阻力加速度达到0.2g以后,开展进入制导过程修正航程误差,同时监视横程误差变化执行必要的倾侧角反转。
22.热流峰值产生在进入大气层后约80s,此时在大底上产生的极端高温约2100℃,飞行高度为27km,距离着陆点230km,飞行马赫数为24,速度为4690m/s。10s以后加速度达到峰值11.4g,距火星表面19km,距离着陆点200km,飞行马赫数为19,飞行速度3600m/s。
23.(5)第二次释放配重块
24.当探测器结束制导进入机动,在降落伞打开前几秒,背罩释放另一套配重,共6个,每个重量25kg,使得进入器的质心转移到对称轴的后部,配平攻角重新成为0
°
。
25.(6)超音速开伞和伞降
26.进入后255s降落伞打开,此时探测器的高度为11km,速度约为405m/s。20s后,大底分离,此时高度为8km,速度约125m/s。火星降落相机开始拍摄进入器下方火星表面。末端下降敏感器,开始测量相对速度和高度。
27.(7)下降发动机点火
28.与降落伞连接的背罩在大底分离97s后与下降级和火星车分离。释放背罩后,下降级和火星车以近似自由落体的方式进行0.8s加速,来保证与背罩间安全距离。此时,进入器高度为1.4km,速度为80m/s。下降级上8个发动机在制动下降阶段开始点火。
29.(8)空中吊车下降火星车
30.下降段结束后,在18.6m高度处,gnc系统切换为空中吊车模式。吊车与火星车通过3条尼龙绳相连接并实现质心并列配置,以最大程度限制外界干扰。在空中吊车悬浮的过程中,以0.75m/s的竖直速度持续下降,吊车与火星车分离7s后,尼龙绳完全展开为7.5m长且停止下降实现悬停,随后会有2s的最终触地姿态校正。分离9s后,触地过程启动,仍以0.75m/s的速度下降至最终触地,确定火星车最终触地后,吊车点火熔断绳索,吊车开始飞离,火星车的车轮和悬挂装置,同时也作为起落架,在触地之前弹开,火星车成功实现软着陆,如图2所示。(9)吊车飞离
31.当吊车与火星车切断联系后,吊车会自动搜寻一个落点并启动飞离模式。吊车会先进行悬停,等待绳索丝与火星车完全脱离并相互不再影响。悬停结束后,吊车将其中两个发动机调至100%工作状态,另两个则调至低于100%工作状态,从而使吊车产生竖直方向上45
°
的倾角,调角完成后所有发动机均调为100%工作状态,吊车飞离火星车着陆点。燃料
消耗殆尽后,吊车做自由运动,最终坠毁至距火星车150m之外的火星表面。
技术实现要素:
32.本发明所解决的技术问题是:克服现有技术的不足,提供一种探测器弹道升力式火星进入的方法,利用极小的重量代价,提高了火星大气进入过程对大气参数偏差的适应能力。
33.本发明的技术解决方案是:一种探测器弹道升力式火星进入的方法,所述探测器包括环绕器和着陆巡视器,该方法包括如下步骤:
34.s1、发射前偏置着陆巡视器的质心,使着陆巡视器在火星大气进入过程中产生预期的配平攻角;
35.s2、将探测器送入火星环绕轨道,探测器环绕火星飞行,按照预设的飞行时序开始降轨;
36.s3、降轨后,探测器沿进入轨道滑行,在地面遥控指令的控制下,环绕器与着陆巡视器分离;
37.s4、环绕器与着陆巡视器分离后,环绕器升轨回到停泊轨道,机动至中继通信姿态,建立地面与着陆巡视器之间的中继通信链路,着陆巡视器继续沿进入轨道滑行,机动至分离滑行三轴稳定姿态;
38.s5、进入火星大气之前,着陆巡视器调整到进入姿态,所述进入姿态在分离滑行三轴稳定姿态的基础上绕着陆巡视器本体系y轴旋转,使着陆巡视器保持预期的配平攻角飞行,直到着陆巡视器进入火星大气之后,着陆巡视器进入攻角配平阶段;
39.s6、在攻角配平阶段,着陆巡视器保持步骤s6的滑行三轴稳定姿态继续飞行,进入火星大气,直到气动阻力加速度大于预设门限后,着陆巡视器进入升力控制阶段;
40.s7、在升力控制阶段,控制着陆巡视器的倾侧角,调整升力的方向,使得着陆巡视器跟踪预设标称弹道飞行;
41.s8、当着陆巡视器马赫数小于第一预设门限时,着陆巡视器弹出配平翼,配平翼弹出后,通过配平翼使得配平攻角回到0
°
,着陆巡视器气动力逐渐使着陆巡视器攻角回到0
°
;
42.s9、当着陆巡视器马赫数小于第二预设门限时,着陆巡视器弹出降落伞,迅速将着陆巡视器速度降至亚音速。
43.优选地,所述预期的配平攻角为-10
°
。
44.优选地,所述火星环绕轨道的轨道周期为2个火星日,当探测器到达近火点时,正好经过着陆点上空,为确保进入降轨精度,环绕轨道近火点应不高于300km。
45.优选地,所述降轨时间为探测器到达近火点前的5.5小时至6.5小时。
46.优选地,所述步骤s6中的预设门限为2m/s2。
47.优选地,所述第一预设门限为2.35~3.25。
48.优选地,所述第二预设门限为1.5~2.1。
49.优选地,所述分离滑行三轴稳定姿态是指着陆巡视器本体坐标系-x轴在进入点轨道面内指向火星方向,且与进入点速度方向夹角为-40
°
,本体坐标系+y轴沿进入点轨道法线方向。
50.优选地,所述步骤s2~s4中在非轨控或分离过程中,火星探测器利用轨道动力学
进行位置速度导航,在轨控和分离过程中,引入加速度计的测量结果,在轨道动力学的基础上进行六自由度动力学积分,完成位置速度导航。
51.优选地,所述步骤s5~s7着陆巡视器引入加计测量结果,在轨道动力学的基础上进行六自由度动力学积分,完成位置速度导航。
52.本发明与现有技术相比的有益效果是:
53.(1)、本发明在发射前偏置探测器进入舱质心,使其在火星大气进入过程中产生预期的配平攻角,通过进入舱倾侧角控制调整升力方向,可适应较大的导航初值偏差、大气参数偏差和气动参数偏差,开伞前展开配平翼,使进入舱配平攻角回零,满足气动减速段有攻角和开伞前零攻角的攻角控制需求;
54.(2)、本发明在进入火星大气前且非探测器轨控时间段,着陆巡视器不引入加速度计测量数据,仅利用轨道动力学进行位置导航,提高导航精度。
55.(3)、本发明降轨策略设计以着陆巡视器到达火星表面高度125km时的着陆巡视器经纬度、进入角标称值为目标,通过仿真迭代计算得到,降轨稳定。
附图说明
56.图1为msl的edl过程中进入姿态示意图;
57.图2为msl的空中吊车软着陆示意图;
58.图3为本发明实施例着陆巡视器进入舱气动外形;
59.图4为本发明实施例探测器弹道升力式火星进入的方法流程图;
60.图5为本发明实施例配平翼展开状态。
具体实施方式
61.下面结合说明书附图和具体实施方式对本发明进行进一步解释和说明。
62.本发明提供了一种探测器弹道升力式火星进入的方法,所述探测器包括环绕器和着陆巡视器,如图4所示,该方法包括如下步骤:
63.s1、发射前偏置着陆巡视器的质心,使着陆巡视器在火星大气进入过程中产生预期的配平攻角;
64.对于确定的气动外形,采用不同的攻角飞行,将产生不同的升力,攻角越大,升力越大,控制能力越强,但减速性能越低。综合火星探测任务着陆精度要求、减速性能要求,确定着陆巡视器的配平攻角为-10
°
。
65.质心的位置决定了配平攻角的大小,质心位置设计流程如下:根据气动外形设计结果,确定最佳配平攻角;根据气动力/力矩分析得到在攻角为
ɑ
时的端部受力/力矩令质心在端部坐标系下的坐标矢量为则通过解方程得到质心位置。
66.本发明某一具体实施例中,着陆巡视器进入舱气动外形如图3所示。
67.s2、将探测器送入火星环绕轨道,探测器环绕火星飞行,按照预设的飞行时序开始降轨;
68.所述火星环绕轨道的轨道周期为2个火星日,当探测器到达近火点时,正好经过着陆点上空,为确保进入降轨精度,环绕轨道近火点应不高于300km。
69.降轨时刻选择受轨道误差发散程度和地面飞控决策时间约束,过早降轨将导致进入点误差过大,过晚降轨将导致降轨后地面状态判读决策时间不足。
70.本发明降轨时间根据如下原则确定:
71.降轨时刻前沿应满足降轨后误差发散程度满足进入点要求,降轨时刻后沿应满足降轨后,考虑信号传播时间的前提下,地面至少有40分钟用于判断器上状态和决策的时间。综上,降轨时间在探测器到达近火点前的5.5小时至6.5小时。
72.本发明某一具体实施例中,探测器降轨前30min,利用地面测定轨结果,外推得到降轨前10分钟时刻的位置、速度信息,作为导航初值,注入探测器。导航初值的具体形式为(trv),其中t为导航初值对应的历元时刻,r为探测器在t时刻的位置矢量,描述在火星j2000惯性系,v为探测器在t时刻的速度矢量,描述在火星j2000惯性系。
73.降轨前10分钟,着陆巡视器上使用上注的位置、速度信息,结合星敏感器、imu的姿态和加速度测量结果,即着陆巡视器的三轴加速度,开始导航外推,得到着陆巡视器当前实时的姿态、位置和速度。为提高导航精度,在探测器未执行喷气指令时,不引入加速度计的测量结果,仅用轨道动力学进行位置导航。该模式持续到大气其进入前10s。
74.s3、降轨后,探测器沿进入轨道滑行,在地面遥控指令的控制下,环绕器与着陆巡视器分离;
75.s4、环绕器与着陆巡视器分离后,环绕器升轨回到停泊轨道,机动至中继通信姿态,建立地面与着陆巡视器之间的中继通信链路,着陆巡视器继续沿进入轨道滑行,机动至分离滑行三轴稳定姿态。
76.本步骤中,探测器分离条件包括探测器单机设备正常、导航轨道参数满足进入点要求等。降轨后,探测器建立分离姿态,由地面根据遥测数据判断探测器满足分离条件后,地面发送允许着陆巡视器与环绕器分离指令,实现环绕器与着陆巡视器分离。
77.此时着陆巡视器考虑热控和敏感器视场约束,保持分离滑行三轴稳定姿态.所述分离滑行三轴稳定姿态是指着陆巡视器本体坐标系-x轴在进入点轨道面内指向火星方向,且与进入点速度方向夹角为-40
°
,本体坐标系+y轴沿进入点轨道法线方向。
78.s5、进入火星大气之前,着陆巡视器调整到进入姿态,所述进入姿态在分离滑行三轴稳定姿态的基础上绕着陆巡视器本体系y轴旋转,使着陆巡视器保持预期的配平攻角飞行,直到着陆巡视器进入火星大气之后,着陆巡视器进入攻角配平阶段;
79.本发明某一具体实施例中,大气进入前10s,进入舱调整进入姿态,使其满足-10
°
攻角并保持,同时器上开始无条件引入加计测量结果。为防止大气进入后,星敏测量数据出错,器上自主关闭星敏感器,采用陀螺积分确定实时姿态。
80.距参考火星表面高度从约125km到约60km区间大气稀薄,根据进入舱气动特性,80km以上随着高度增加阻力系数迅速增大、升阻比迅速减小、静稳定裕度迅速降低,95km以上出现静不稳定。因此,该段进行滑行三轴稳定姿态控制保持进入姿态。
81.s6、在攻角配平阶段,着陆巡视器保持步骤s6的滑行三轴稳定姿态继续飞行,进入火星大气,直到气动阻力加速度大于预设门限后,着陆巡视器进入升力控制阶段;所述预设门限为2m/s2。
82.s7、在升力控制阶段,通过控制着陆巡视器的倾侧角,调整升力的方向,使得着陆巡视器跟踪预设标称弹道飞行;
83.该阶段距参考火星表面高度从约60km到约11.3km,该段气动阻力增大,升力控效果逐渐显著,通过调整进入舱倾侧角调整升力方向,保证进入轨迹和开伞点满足使用要求。
84.对进入轨迹的主要约束包括总加热量约束、峰值热流密度约束、配平翼展开动压约束、弹伞高度约束、弹伞动压约束等,进入舱通过调整升力方向改变进入轨迹,使得在不同偏差的火星环境条件下,进入过程满足以上约束。
85.s8、当着陆巡视器马赫数小于第一预设门限时,着陆巡视器弹出配平翼,配平翼弹出后,通过配平翼使得配平攻角回到0
°
,着陆巡视器气动力逐渐使着陆巡视器攻角回到0
°
;所述第一预设门限为2.35~3.25。
86.所述配平翼满足如下气动特性:在配平翼展开后,着陆巡视器气动受力中心发生变化,在火星大气环境中、距火星表面4~25km范围、2ma至3ma条件下,气动受力中心与着陆巡视器质心连线与着陆巡视器本体系x轴平行。
87.如图5所示,本发明某一具体实施例中,配平翼包括翼板、展开臂、连杆组件、螺旋传动装置、阻尼装置、气源装置、压紧释放装置等组成。翼板为等腰梯形状结构,在翼板根部与展开臂连接;展开臂为由2个c状臂杆构成的对撑结构,两臂杆之间通过方形连接板连接,臂杆根部通过轴承及基座安装于火星探测器进入舱侧壁结构上,翼板与展开臂装配体可相对进入舱侧壁转动,配平翼收拢时翼板通过压紧释放装置压紧;阻尼装置和螺旋传动装置水平安装于进入舱所提供的安装支架上,阻尼装置提供直线运动,其输出轴与螺旋传动装置螺旋杆连接,从而将阻尼装置直线运动通过螺旋传动装置螺旋杆转化为螺旋副转动;翼板通过连杆机构与螺旋传动装置输出轴连接,连杆组件由连杆a、连杆b及铰链组成,连杆a与连杆b通过铰链连接,铰链具有转动及锁定功能;连杆组件连杆a、连杆组件连杆b、翼板及展开臂c状臂杆共同构成曲柄摇杆机构;气源装置安装在进入舱结构上,气源装置由气瓶、加气排气阀(2个),电爆阀(上下游管路各1个)及管路组成,气源组件与阻尼装置之间由管路连接,气瓶预充一定压力的气体(氦气、氮气等)。
88.火星探测器发射时,配平翼为收拢状态,翼板通过压紧释放装置压紧在进入舱侧壁上;探测器进入过程中,压紧释放装置先解锁,随后气源装置电爆阀打开(2个电爆阀只要有1个打开即可),气瓶与阻尼装置之间的管路连通,气瓶存储的高压气体进入阻尼装置,驱动阻尼装置活塞杆运动,阻尼装置活塞杆拉动螺旋传动装置螺旋杆作直线运动,与螺旋杆相匹配的螺旋套则发生转动,并通过输出轴将转动传递至连杆组件,连杆组件驱动翼板与展开臂装配体相对展开臂基座转动,在运动过程中,阻尼装置可有效降低配平翼展开锁定时的冲击载荷;翼板展平后,连杆组件铰链锁定。翼板展开后,连杆组件连杆a和连杆b运动到死点位置并锁定,翼板、展开臂、连杆组件构成稳定的结构,可承受探测器进入火星大气过程中的气动载荷,并通过气动载荷实现进入舱进入攻角的控制。
89.为确保配平翼展开条件满足使用工况,类似以往地球返回任务中的加速度或高度、压力触发均无法满足火星环境下的配平翼展开要求,设计了以导航马赫数为触发条件的平翼展开策略。结合开伞条件,本发明某一具体实施中,当导航马赫数小于2.8时,器上发送配平翼展开指令。开伞前,通过展开配平翼,改变进入舱气动压心,使气动压心与质心的连线与舱体轴线平行,实现进入舱配平攻角回零。配平翼展开状态如图2所示。
90.s9、当着陆巡视器马赫数小于第二预设门限时,着陆巡视器弹出降落伞,迅速将着陆巡视器速度降至亚音速。所述第二预设门限为1.5~2.1。
91.上述步骤s2~s4在非轨控或分离过程中,着陆巡视器利用轨道动力学进行位置速度导航,在轨控和分离过程中,引入加速度计的测量结果,在轨道动力学的基础上进行六自由度动力学积分,完成位置速度导航。
92.上述步骤s5~s7着陆巡视器引入加计测量结果,在轨道动力学的基础上进行六自由度动力学积分,完成位置速度导航。
93.为确保降落伞展开条件满足使用工况,类似以往地球返回任务中的加速度或高度、压力触发均无法满足火星环境下的配平翼展开要求,设计了以导航马赫数为触发条件的降落伞展开策略。
94.开伞阈值的选择主要约束包括开伞载荷、抛底后伞降时间、稳降速度。
95.本发明某一具体实施例中,当导航马赫数小于1.8时,触发弹伞信号,弹射降落伞,进入舱进入伞降段。
96.综上,本发明具备以下几个特点:
97.(1)基于配平翼实现配平攻角回零
98.进入舱为回转体,发射前偏置进入舱质心,使其在火星大气进入过程中产生预期的配平攻角。开伞前,通过展开配平翼,实现进入舱配平攻角回零。
99.(2)使用导航马赫数作为配平翼展开的触发条件
100.为确保配平翼展开条件满足使用工况,类似以往地球返回任务中的加速度或高度、压力触发均无法满足火星环境下的配平翼展开要求,设计了以导航马赫数为触发条件的平翼展开策略。
101.(3)攻角配平段采用三轴稳定姿态控制保持进入姿态
102.距参考火星表面高度从约125km到约60km区间大气稀薄,根据进入舱气动特性,80km以上随着高度增加阻力系数迅速增大、升阻比迅速减小、静稳定裕度迅速降低,95km以上出现静不稳定。该阶段不具备利用气动力保持稳定姿态的条件,因此该段进行三轴稳定姿态控制保持进入姿态。
103.(4)升力控制段采用标称弹道跟踪控制策略
104.该阶段距参考火星表面高度从约60km到约11.3km,该段气动阻力增大,升力控效果逐渐显著,通过调整进入舱倾侧角调整升力方向,跟踪标称弹道,确保进入轨迹和开伞点满足使用要求。
105.(5)使用阻力加速度≥0.2g作为攻角配平段与升力控制段的切换条件
106.火星高层大气密度不确定度大,单以高度作为攻角配平段与升力控制段的划分条件存在较大误差,可能影响进入舱气动稳定性或升力控效率,进而影响开伞条件。采用阻力加速度作为切换条件,可较好避免大气密度波动对控制的影响。根据着陆巡视器进入工况,达到60km时,加计测量结果约为2m/s2。本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。