1.本发明涉及一种面向着陆任务的高可靠高灵敏触地系统方法,属于地外天体软着陆技术领域。
背景技术:
2.我国首次火星探测任务要求进入舱软着陆于火星表面。进入舱由背罩、大底和着陆平台组成,其中着陆平台上安装有星载控制计算机、各类敏感器和执行机构。在进入舱抛除大底和背罩之后,着陆平台展开着陆腿,启动反推发动机进行减速,为了保证着陆的安全性,需在进入舱触地时立即关闭反推发动机,为此需要设计一套高可靠性、高灵敏性的触地逻辑来判断进入舱的着陆状态。
3.针对航天器的软着陆技术,cn201210452823.9号专利公开了一种航天器软着陆用触地信号装置,由微动开关、预紧弹簧、波纹管组件、盖型螺母、随动杆等组成,通过随动杆的轴向运动,触发微动开关,使微动开关给出触地信号,为航天器提供反推发动机的关机信号,保障软着陆安全。cn201710509650.2号专利公开了一种着陆缓冲机构用着陆信号装置,包括触发传动部件、上端触发部件、下端触发部件和触发信号传输部件,可提高着陆信号装置的地形适应能力及触发可靠性。cn201510095001.3号专利公开了一种月面着陆缓冲装置,包括着陆舱、主支腿、足垫、引爆分离结构、展开机构,可用于载人月球探测,另外也适用于小行星、火星、彗星等着陆器探测。上述专利主要是对软着陆技术中的触地装置及触地信号进行了设计,而对如何有效地使用触地信号及其他辅助信息来快速可靠地判断触地状态未有相关说明。
技术实现要素:
4.本发明的技术解决问题是:克服现有技术的不足,提出了一种面向地外天体软着陆任务的触地系统设计,解决了在不具备天地通讯的条件下,充分利用各种有用信息,星上自主、可靠、灵敏地判断着陆状态的问题。
5.本发明的技术方案是:
6.一种面向着陆任务的高可靠高灵敏触地系统,包括:触地敏感器、加速度计、信号采集单元、触地信号容错判断单元、加速度信号容错判断单元和综合触地容错判断单元;
7.触地敏感器:固定安装在着陆器的着陆腿上,用于采集触地状态并作为触地敏感器数据并传输给信号采集单元;
8.加速度计:固定安装在着陆器中的着陆平台上,用于采集着陆器的加速度数据并传输给信号采集单元;
9.信号采集单元:采集触地敏感器数据,采集加速度数据;在最终一个火工品起爆后,对触地敏感器进行初始化处理;根据在轨自检结果,确定状态满足使用要求的触地敏感器和加速度计,将状态满足使用要求的触地敏感器对应的触地敏感器数据传输给触地信号容错判断单元,同时,将状态满足使用要求的加速度计对应的加速度数据传输给加速度信
号容错判断单元;
10.触地信号容错判断单元:接收信号采集单元传输的触地敏感器数据,根据触地敏感器数据,判断着陆腿是否触地,获得触地敏感器对应的触地结果并传输给综合触地容错判断单元;
11.加速度信号容错判断单元:接收信号采集单元传输的加速度数据,根据加速度数据,判断着陆腿是否触地,从而获得加速度计对应的触地结果,将加速度计对应的触地结果传输给综合触地容错判断单元;
12.综合触地容错判断单元:接收触地敏感器对应的触地结果和加速度计对应的触地结果,根据触地敏感器对应的触地结果和加速度计对应的触地结果,获得最终的触地结果。
13.本发明与现有技术相比的有益效果是:
14.(1)本发明在利用常规触地信号进行触地判断的前提下,为进一步提高灵敏性,增加了加速度计信息进行综合触地状态判断。
15.(2)本发明提出了一种容错判断方法,对触地信号和加速度信号进行综合判断,提高了触地状态判断的可靠性和安全性。
16.(3)本发明提出的触地系统具备高度的自主性,已成功应用于我国首次火星探测任务。
附图说明
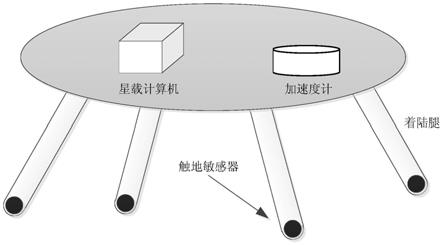
17.图1为本发明系统配置示意图。
18.图2为本发明系统设计框图。
19.图3为本发明软件设计示意图。
具体实施方式
20.下面结合附图和具体实施方式对本发明做进一步详细的描述。
21.如图2所示,本发明一种面向着陆任务的高可靠高灵敏触地系统,包括:触地敏感器、加速度计、信号采集单元、触地信号容错判断单元、加速度信号容错判断单元和综合触地容错判断单元。
22.触地敏感器:固定安装在着陆器的着陆腿上,用于采集触地状态(触地状态包括:0为触地和1为未触地)并作为触地敏感器数据并传输给信号采集单元;
23.着陆器的着陆腿的数量n大于或等于3;
24.触地敏感器的个数与着陆腿的个数相同,每个着陆腿上固定安装有一个触地敏感器;
25.加速度计:固定安装在着陆器中的着陆平台上,用于采集着陆器的加速度数据并传输给信号采集单元;
26.信号采集单元:采集触地敏感器数据,采集加速度数据;在最终一个火工品起爆后,对触地敏感器进行初始化处理;根据在轨自检结果,确定状态满足使用要求的触地敏感器和加速度计,将状态满足使用要求的触地敏感器对应的触地敏感器数据传输给触地信号容错判断单元,同时,将状态满足使用要求的加速度计对应的加速度数据传输给加速度信号容错判断单元;
27.所述对触地敏感器进行初始化处理,具体为:
28.将所有触地敏感器恢复至初始状态,防止因火工品起爆造成触地敏感器对应的触地敏感器数据在实际触地前即为触地。在具备星地通信状态时,由地面站确定每路触地敏感器数据的健康状态,若某路触地敏感器数据经地面站判断为不可用,则通过上注指令将该路触地敏感器数据设置为不用于在着陆时判断是否触地。
29.触地信号容错判断单元:接收信号采集单元传输的触地敏感器数据,根据触地敏感器数据,判断着陆腿是否触地,获得触地敏感器对应的触地结果并传输给综合触地容错判断单元;
30.所述触地结果包括:着陆腿触地和着陆腿未触地。
31.触地信号容错判断单元根据触地敏感器数据,判断着陆腿是否触地,具体为:
32.当每路触地敏感器承受的压力fi≥kc×mz
×
g0时,则认为着陆腿触地,否则为着陆腿未触地,g0为天体引力加速度,mz为着陆器着陆时的质量,kc为触地敏感器压力加权因子。kc的取值范围为0~1。
33.加速度信号容错判断单元:接收信号采集单元传输的加速度数据,根据加速度数据,判断着陆腿是否触地,从而获得加速度计对应的触地结果,将加速度计对应的触地结果传输给综合触地容错判断单元;
34.加速度信号容错判断单元判断着陆腿是否触地的方法,具体为:
35.加速度计敏感的加速度数据a满足a≥ka×
g0时,则认为着陆腿触地,否则为着陆腿未触地。ka为加速度加权因子。取值范围为0~1。
36.综合触地容错判断单元:接收触地敏感器对应的触地结果和加速度计对应的触地结果,根据触地敏感器对应的触地结果和加速度计对应的触地结果,获得最终的触地结果。
37.最终的触地结果包括:着陆器触地成功和着陆器触地不成功。
38.所述综合触地容错判断单元获得最终的触地结果,具体为:
39.51)根据触地敏感器对应的触地结果,判读有几条着陆腿触地,若着陆腿触地的数量大于或等于2,则进入步骤53);若着陆腿触地的数量等于1,则进入步骤52);反之则进入步骤54)
40.52)根据加速度计对应的触地结果,判读加速度计对应的触地结果是否为着陆腿完成触地,若完成触地则进入步骤53),反之则进入步骤54);
41.53)判读最终的触地结果为着陆器触地成功;
42.54)判读最终的触地结果为着陆器触地不成功。
43.实施例
44.我国首次火星探测着陆任务中的使用情况如下:
45.触地系统的硬件的具体配置为:4个着陆腿的着陆器,每个着陆腿上安装1个触地敏感器;采用惯性测量单元中的3个加速度计;配置1台星载计算机,具备与4个触地敏感器和3个加速度计的供电和通讯接口,如图1所示。
46.针对触地信号的触地容错判断方法如图3所示,具体为:设计触地信号可用标志flag_s,由4位二进制数表示,di表示可用标志的第i位数据(i=0~4),di=0表示第i个触地信号可用,di=1表示第i个触地信号不可用,初始默认值均为0;采集触地并口信号coll_s,由4位二进制数表示,di表示并口采集的第i位数据(i=0~4),di=0表示并口采集到第i
个触地信号,di=1表示并口未采集到第i个触地信号,初始默认值均为1;设计触地信号状态stat_s,由4位二进制数表示,di表示状态标志的第i位数据(i=0~4),di=0表示第i个触地信号状态为触地,di=1表示第i个触地信号状态为未触地;软件每控制周期采集4路并口输出的触地信号,对每路的触地信号和该路的触地信号可用标志位进行“或”操作,输出结果为该路的触地信号状态;
47.针对加速度计的触地容错判断方法为:设计加速度触地可用标志flag_a,flag_a=0表示加速度触地不可用,flag_a=1表示加速度触地可用;软件每控制周期采集3个加速度计输出数据acc_d,计算垂直地面方向的加速度大小acc_v;设计加速度触地状态stat_a,stat_a=0表示加速度触地状态满足,stat_a=1表示加速度触地状态不满足;软件判断当加速度触地可用标志flag_a=1,且连续2个控制周期acc_v》6m/s2时,加速度触地状态stat_a=0,否则stat_a=1。
48.综合触地容错判断方法为:设计综合触地标志flag_td,flag_td=0表示成功触地,flag_td=1表示未成功触地;软件判断4路触地信号中有2路及2路以上有效时,即stat_s中触地信号状态为0的位数≥2,则为成功触地,即flag_td=0;软件判断4路触地信号中有1路有效,即stat_s中触地信号状态为0的位数=1,且加速度触地状态stat_a=0时,则为成功触地,即flag_td=0;
49.触地系统使用方法为:着陆任务前期,在具备天地通讯的条件下,触地信号可用标志flag_s和加速度触地可用标志flag_a由地面进行维护,可通过指令上行注入修改,当注入某路触地信号可用,即置flag_s某位为0;加速度触地判断可用时置flag_a=1。着陆任务中期,为防止火工品冲击等力学环境误触发触地信号,首先在力学环境之后由星载软件自主对fpga进行初始化操作,置4路触地并口信号中所有位均为1;此后,星上自主维护触地信号可用标志flag_s,每周期采集触地并口信号coll_s,若触地关机信号有效,则认为该路发生故障,置该路触地信号可用标志flag_s中某位为1;着陆任务后期,保持触地信号可用标志flag_s为确定状态,每周期采集触地并口信号coll_s和加速度计输出数据acc_d,进行综合触地判断,若flag_td=0,则成功触地。
50.本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
51.本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。