所述舵机、所述足部吸附装置和所述氮气推进系统进行控制的指令,以及接收所述控制主板 传输的所述光学摄像头和探伤仪采集的数据;
14.无线通信装置,完成所述控制主板与所述控制终端之间的通信;
15.所述光学摄像头和探伤仪数据采集的数据传送给所述控制主板,且依次经所述数据 采集软件进行采集、数据编码软件进行编码,然后由所述无线通信装置传输给控制终端的, 经所述数据解码软件解码后显示于所述人机交互界面;
16.所述控制终端通过所述人机交互界面下发控制指令,由所述通信软件经所述无线通 信装置传输给所述控制主板,通过所述指令解析软件对所述控制指令进行解析,然后下发至 所述运动控制软件,对所述舵机、所述足部吸附装置和所述氮气推进系统进行控制,操纵所 述空间站爬壁巡检机器人。
17.进一步的,所述舵机、传感器载台、控制主板、高压液氮储存罐、电磁阀和无线通 信装置均安装于机身上,所述机身包括底盘和上盖板,所述底盘的侧面通过六个所述舵机安 装六个足关节,所述底盘内部安装所述无线通信装置、控制主板、高压液氮储存罐和电磁阀, 所述上盖板上安装所述传感器载台。
18.进一步的,所述底盘内部还安装驱动板和航天锂电池,所述航天锂电池设置于底盘 的中部,给所述控制主板供电,所述控制主板通过驱动板驱动舵机,足部吸附装置和氮气推 进系统。
19.进一步的,所述足关节包括髋关节、大腿关节和小腿关节,所述舵机通过所述髋关 节连接髋关节支架,所述髋关节支架通过所述大腿关节连接大腿支架,所述大腿支架通过所 述小腿关节连接小腿支架。
20.进一步的,所述传感器载台上安装所述光学摄像头和探伤仪。
21.进一步的,所述足部吸附装置主要包括球形万向节,橡胶缓冲垫和吸盘式电磁铁。 所述小腿足部的自由端连接于球形万向节,所述球形万向节固定有橡胶缓冲垫,所述橡胶缓 冲垫下端固定有吸盘式电磁铁。所述控制主板通过驱动板驱动足部吸附装置的吸盘式电磁铁, 使机器人吸附在太空站上。
22.进一步的,所述氮气推进系统主要包括推力喷嘴、导气管、高压液氮储存罐和电磁 阀。所述高压液氮储存罐一端有电磁阀,所述电磁阀另一端有导气管,所述导气管有推力喷 嘴,所述推力喷嘴安装于机器人足部,所述控制主板通过驱动板驱动推进系统的电磁阀,进 而使液氮通过导气管和推力喷嘴进行喷射,实现空间站爬壁巡检机器人在太空中的飞行以及 姿态调整。
23.进一步的,所述控制主板内含imu陀螺仪姿态芯片。
24.进一步的,所述传感器载台上安装光学摄像头和探伤仪,其中光学摄像头具有主动 式红外夜视功能。
25.进一步的,还包括传感器系统,所述控制主板还安装传感器接口软件,所述传感器 系统的传感器通过连接于所述传感器接口软件。
26.该发明空间站爬壁巡检机器人的有益效果:通过舵机使用足式运动,能够适应空间 站各种地形;采用光学摄像头,其中光学摄像头具有主动红外夜视功能,解决宇航员不能在 黑暗中工作的问题;球形万向节可以自由转动任意角度,进而保证足部吸附装置的吸盘式电 磁铁以最佳角度吸附在空间站的镍基合金外壁上,同时也保证机器人抬脚的时候
电磁铁恢复 初始角度;橡胶缓冲垫以及降低机器人爬行时的震动;氮气推进系统一种以液氮为推进剂的 液化气动力装置,机器人通过改变足部氮气的喷射速度和角度,进而完成对机器人的飞行轨 道控制。具有imu陀螺仪姿态芯片,能够实时检测失重环境中机身姿态,有利于控制氮气推 进装置,进而保证机器人在失重环境中稳定地飞向目标处。
附图说明
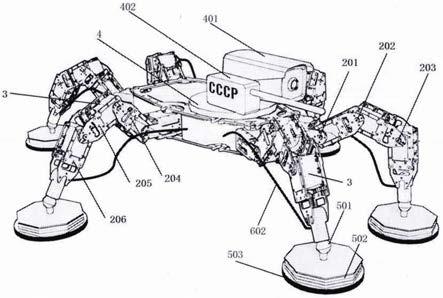
27.图1为本发明实施例中空间站爬壁巡检机器人的结构示意图;
28.图2本发明实施例中空间站爬壁巡检机器人的俯视图;
29.图3为本发明实施例中机身的结构示意图;
30.图4为本发明实施例中机身的分解结构示意图;
30.图5为本发明实施例中足部吸附装置的结构示意图;
31.图6为本发明实施例数据采集系统结构框图;
32.图7为本发明实施例遥控系统结构框图;
33.图8为本发明实施例传感器系统结构框图。
34.图中:1、机身,101、底盘,102、上盖板,2、足关节,201、髋关节,202、大腿关 节,203、小腿关节,204、髋关节支架,205、大腿支架,206、小腿支架,3、舵机,4、传 感器载台,401、光学摄像头,402、探伤仪,5、足部吸附装置,501、球形万向节,502、橡 胶缓冲垫,503、吸盘式电磁铁,6、氮气推进系统,601、推力喷嘴,602、导气管,603、高 压液氮储存罐,604、电磁阀,7、无线通信装置,8、控制主板,9、驱动板,10、航天锂电 池。
具体实施方式
35.以下结合实施例对本发明作进一步的阐述。
36.如说明书附图1-2所示,一种可在空间站上任意位置攀爬的巡检机器人,主要由机 身1、与机身1连接的六条足关节2、传感器载台4、足部吸附装置5、氮气推进系统6组成。 该空间站爬壁巡检机器人为仿生设计,采用外骨骼方式,机身1、足关节2、和传感器载台4 为钛合金,具有重量轻,结构强度高,抗腐蚀等优点。
34.如说明书附图1-2所示,该六足机器人每条足关节2拥有三个自由度,分别为髋关 节201、大腿关节202和小腿关节203,结构由髋关节支架204、大腿支架205、小腿支架206 组成,具体的,髋关节201一端通过舵机3安装于机身1上,另一端连接髋关节支架204, 髋关节支架204通过大腿关节202连接大腿支架205,大腿支架205通过小腿关节203连接 小腿支架206。通过足关节2的三个自由度该空间站爬壁巡检机器人能够在驱动器允许的范 围内,运动到运作空间的任意位置。在一实施例中,空间站爬壁巡检机器人运动使用反向运 动解析ik方式,先求得需要到达的空间位置,再将空间位置反向运动解析为舵机角度,控制 主板6通过驱动板7驱动舵机3控制足关节2运动至指定角度。从而满足了机器人在太空真 空和失重恶劣环境下,机器人可以任意吸附在空间站并且自由行走的需求。
37.较优的,机身1主要由底盘101和上盖板102组成,如说明书附图3-4所示,上盖 板102上安装传感器载台4,课题侧面通过六个舵机3安装六个足关节2,底盘101内部安装 控制主板8、驱动板9、航天锂电池10、无线通信装置7、高压液氮储存罐603和电磁阀604。 其中控制主板6负责所有的高层运算功能,包括指令解析、数据压缩、数据传输、数据识别、 避
生的六个足关节以及氮气推进装置系统,无论在真空还是失重都能对处于复杂环境中的空间 站进行实时巡检并及时预警,大大降低宇航员的工作负担,提升空间站的巡检效率。
45.本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域 的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但 并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
46.尽管本文较多地使用1.机身,101.地盘,102.上盖板,2.足关节,201.髋关节, 202.大腿关节,203.小腿关节,204.髋关节支架,205.大腿支架,206.小腿支架,3.舵机, 4.传感器载台,401.光学摄像头,402.探伤仪,5.足部吸附装置,501.球形万向节,502.橡 胶缓冲垫,503.吸盘式电磁铁,6.氮气推进系统,601.推力喷嘴,602.导气管,603.高压液 氮储存罐,604.电磁阀,7.无线通信装置,8.控制主板,9.驱动板,10.航天锂电池等术语, 但是使用这些术语仅仅是为了更方便地描述和解释本发明的本质,把它们解释成任何一种附 加的限制都是与本发明精神相违背的。