1.本技术涉及飞行设备的领域,尤其是涉及一种载物无人机。
背景技术:
2.无人驾驶飞机简称“无人机”,无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,与有人驾驶飞机相比,无人机相对适合完成不便于采用人工或其他机械的任务。如今,为了快速的进行中短途运输,人们往往将货物捆绑于无人机上,并对货物进行运输。为了减小货物在运输过程中从无人机上掉落的可能性,需将货物与无人机之间捆绑相对较为紧固,从而导致在无人机上装货和卸货时,相对较为不便。
3.为了解决上述技术问题,相关技术中申请号为cn201820303497.8的中国专利公开了一种便于载物的无人机,其技术要点为:包括本体,本体设置有呈一端开口的载物箱,载物箱固定连接有安装板,安装板固定连接于本体,载物箱开口处盖合有箱门,箱门铰接于载物箱开口边沿,载物箱设置有用于将箱门紧固于载物箱的连接件。使用时,只需将货物放置于载物箱内,然后盖合箱门,并通过连接件将箱门与载物箱紧固,从而使得货物在装货与卸货时相对较为便捷。
4.针对上述中的相关技术,由于载物箱不便于对不同大小的货物进行固定,使得在货物运输过程中,放置于载物箱内的货物易发生抖动或滚动,导致货物容易受损,且货物在载物箱内发生滚动时,会导致无人机的重心偏移,从而影响无人机正常飞行。
技术实现要素:
5.为了便于对不同大小的货物进行固定,本技术提供一种载物无人机。
6.本技术提供的一种载物无人机采用如下的技术方案:
7.一种载物无人机,包括本体,所述本体包括机体和多个设置于机体的机翼组件,所述机体设置有起落架,所述起落架设置有若干固定组件,所述固定组件包括主动杆和若干设置于主动杆的载物板,所述主动杆滑移连接于起落架,所述起落架设置有锁止组件,所述锁止组件包括滑移连接于起落架的齿条和一端开设有端齿的卡接块,所述卡接块卡设并滑移连接于起落架,所述主动杆固定连接于卡接块,所述锁止组件还包括用于驱使齿条朝向卡接块滑移的控制螺栓,所述控制螺栓穿设并螺纹连接于起落架,所述控制螺栓转动连接于齿条。
8.通过采用上述技术方案,使用时,将货物放置于载物板上,再滑动主动杆,使得主动杆控制载物板滑移,当货物被夹紧于载物板和起落架之间时,转动控制螺栓,使得控制螺栓驱使齿条朝向卡接块滑移,同时齿条与卡接块上的齿相啮合,从而将主动杆和载物板固定,进而将不同大小的货物固定于载物台上。
9.可选的,所述载物板滑移连接于主动杆,所述主动杆设置有夹持板,所述载物板被夹持于夹持板和主动杆之间,所述主动杆穿设并螺纹连接有若干用于驱使夹持板夹紧载物板的夹持螺栓,所述夹持螺栓抵接于夹持板。
10.通过采用上述技术方案,使用时,根据货物包装箱的大小,将载物板滑移至所需位置,随后转动夹持螺栓,使得夹持螺栓能够控制夹持板将载物板夹紧。
11.可选的,所述载物板设置有若干用于抵接货物侧壁的第一围杆。
12.通过采用上述技术方案,使用时,将第一围杆抵接于货物,从而能够减小货物掉落的可能性。
13.可选的,所述第一围杆卡设并滑移连接于载物板,所述第一围杆穿设并螺纹连接有若干锁紧螺栓,所述锁紧螺栓抵接于载物板。
14.通过采用上述技术方案,根据不同大小的货物滑移第一围杆,随后紧固锁紧螺栓,从而将第一围杆与载物板固定,减小在运输过程中第一围杆发生滑动的可能性。
15.可选的,所述起落架设置有至少两个用于抵接货物的第二围杆。
16.通过采用上述技术方案,使用时,将第二围杆抵接于货物,从而能够进一步减小货物发生掉落的可能性,增加货物在运输时的稳定性。
17.可选的,所述起落架固定连接有安装杆,所述第二围杆卡设并滑移连接于安装杆,且多个所述第二围杆分布于货物沿安装杆长度方向的两侧,所述安装杆转动连接有螺杆,所述螺杆同时穿设并螺纹连接于多个第二围杆,所述螺杆两端的螺纹方向相反。
18.通过采用上述技术方案,转动螺杆,螺杆能够同时驱使多个第二围杆朝向货物滑移,并使得第二围杆能够抵接于货物,从而进一步减小在运输过程中货物掉落的可能性。
19.可选的,所述载物板设置有用于减小货物所受冲击的缓冲组件。
20.通过采用上述技术方案,缓冲组件能够对承载的货物做缓冲,使得无人机在上升和下落的过程中,缓冲组件能够减小运输的货物因受到冲击力发生破损的可能性。
21.可选的,所述缓冲组件包括支撑板、若干滑杆和若干弹簧,所述支撑板设置于载物板背离地面的一侧,所述滑杆固定连接于支撑板,所述滑杆穿设并滑移连接于载物板,若干所述弹簧分别一一对应固定连接于若干滑杆,且所述弹簧固定连接于载物板。
22.通过采用上述技术方案,无人机上升和下落的过程中,支撑板能够通过弹簧的作用,使得支撑板缓慢移动,从而对货物做缓冲,同时,滑杆使得支撑板沿滑杆的长度方向移动,以限制支撑板朝其他方向摆动,从而增加支撑板及弹簧的稳定性。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1.使用时,将货物放置于载物板上,再滑动主动杆,当货物被夹紧于载物板和起落架之间时,紧固控制螺栓,以驱使齿条朝向卡接块滑移,从而将主动杆和载物板固定,进而将不同大小的货物固定于载物台上;
25.2.转动螺杆,螺杆能够同时驱使多个第二围杆朝向货物滑移,并使得第二围杆能够抵接于货物,从而进一步减小在运输过程中货物掉落的可能性。
附图说明
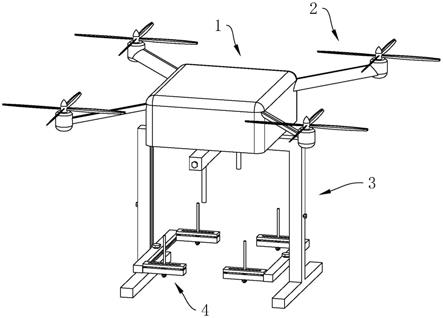
26.图1是本技术实施例的结构示意图;
27.图2是本技术实施例起落架的局部剖视结构示意图;
28.图3是本技术实施例固定组件的爆炸结构示意图;
29.图4是本技术实施例安装杆的爆炸结构示意图。
30.附图标记说明:1、机体;2、机翼组件;3、起落架;31、安装杆;311、第三滑槽;32、竖
杆;321、第一滑槽;33、横杆;34、顶梁;4、固定组件;41、主动杆;411、第二滑槽;42、载物板;421、夹持板;422、夹持螺栓;423、导向孔;5、锁止组件;51、齿条;52、卡接块;53、控制螺栓;6、第一围杆;61、锁紧螺栓;62、夹板;7、第二围杆;71、螺杆;8、缓冲组件;81、支撑板;811、通孔;82、滑杆;83、弹簧。
具体实施方式
31.以下结合附图1-4对本技术作进一步详细说明。
32.本技术实施例公开一种载物无人机。参照图1和图2,一种载物无人机包括本体,本体包括机体1和多个设置于机体1的机翼组件2,机体1设置有起落架3。本实施例中,起落架3包括两个呈竖向设置的竖杆32和两个呈横向设置的两个横杆33,两个横杆33分别一一对应固定连接于两个竖杆32;起落架3还包括设置于两个竖杆32之间的顶梁34,顶梁34两端分别固定连接于两个竖杆32,顶梁34固定连接于机体1。
33.参照图2,本实施例中,起落架3设置有两个固定组件4,当然固定组件4也可设置为一个、三个或其他数量。固定组件4包括主动杆41,主动杆41水平设置,且主动杆41沿竖向滑移连接于竖杆32。主动杆41设置有锁止组件5,锁止组件5包括齿条51、卡接块52和控制螺栓53,竖杆32开设有沿竖杆32长度方向延伸的第一滑槽321,第一滑槽321朝向另一个竖杆32开口设置。
34.参照图2,卡接块52一端开设有端齿且能够与齿条51上的齿相啮合,卡接块52沿竖杆32长度方向卡设并滑移连接于第一滑槽321内,主动杆41固定连接于卡接块52,且主动杆41位于竖杆32朝向另一个竖杆32的一侧。
35.齿条51卡设于第一滑槽321内,且齿条51朝向卡接块52滑移连接于第一滑槽321内壁。
36.参照图2,控制螺栓53穿设并螺纹连接于竖杆32,控制螺栓53水平穿过第一滑槽321底壁,且控制螺栓53转动连接于齿条51,使得能够通过旋转控制螺栓53以控制齿条51朝向卡接块52滑移,并与卡接块52相啮合,从而将卡接块52进行滑移锁止,进而对主动杆41进行滑移锁止。
37.参照图2和图3,固定组件4还包括若干载物板42,本实施例中,载物板42设置为两个,当然载物板42也可设置为一个、三个或其他数量。主动杆41开设有沿主动杆41长度方向延伸的第二滑槽411,第二滑槽411背离卡接块52开口设置。
38.参照图2和图3,载物板42卡设并滑移连接于第二滑槽411内,第二滑槽411内设置有夹持板421,夹持板421沿主动杆41长度方向延伸,两个载物板42同时位于夹持板421和第二滑槽411侧壁之间。主动杆41穿设并螺纹连接有若干夹持螺栓422,本实施例中,夹持螺栓422设置有两个,当然夹持螺栓422也可设置为一个、三个或其他数量。夹持螺栓422抵接于夹持板421,使得能够通过旋转夹持螺栓422以驱使夹持板421朝向载物板42滑移,并使得夹持板421能够同时将两个载物板42夹紧。
39.使用时,根据货物包装箱的大小,将载物板42滑移至所需位置,随后转动夹持螺栓422,使得夹持螺栓422能够控制夹持板421将载物板42夹紧。然后将货物放置于载物板42上,再滑动主动杆41,使得主动杆41控制载物板42在竖直方向上滑移。当货物被夹紧于载物板42和顶梁34之间时,转动控制螺栓53,使得控制螺栓53驱使齿条51朝向卡接块52滑移,同
时齿条51与卡接块52上的齿相啮合,从而将卡接块52和主动杆41固定。
40.参照图3,载物板42设置有缓冲组件8,本实施例中,缓冲组件8包括支撑板81、四个滑杆82和四个弹簧83,支撑板81位于载物板42背离地面的一侧,且支撑板81抵接于货物。滑杆82固定连接于支撑板81,滑杆82穿设并滑移连接于载物板42,四个弹簧83的一端分别一一对应固定连接于四个滑杆82,同时,弹簧83还固定连接于载物板42。
41.在其他实施方式中,滑杆82可设置为一个、两个或其他数量,当然弹簧83也可对应滑杆82设置为其他数量。同时,缓冲组件8可设置为支撑板81、若干滑杆82和若干弹性拨片,滑杆82固定连接于支撑板81,滑杆82竖向穿设并滑移连接于载物板42,若干弹性拨片分别一一对应固定连接于若干滑杆82,同时,弹性拨片还固定连接于载物板42。
42.在运输货物时,无人机上升和下落的过程中,使得货物因受到冲击力存在发生破损的情况。而此时,支撑板81能够通过弹簧83的作用,使得支撑板81能够沿竖直方向缓慢移动,从而对货物做缓冲,以减小运输的货物受到损害的可能性,同时,滑杆82使得支撑板81沿竖向移动,限制支撑板81和弹簧83沿水平或倾斜方向摆动,从而增加支撑板81及弹簧83的稳定性。
43.参照图3,载物板42设置有若干第一围杆6,本实施例中,第一围杆6设置为一个,当然第一围杆6也可设置为两个、三个或其他数量。第一围杆6竖直设置,载物板42开设有导向孔423,导向孔423为长条孔,导向孔423沿竖向贯穿载物板42,第一围杆6穿设于导向孔423,且第一围杆6卡设并滑移连接于导向孔423边沿。同时,支撑板81开设有通孔811,通孔811为长条孔,且通孔811沿导向孔423长度方向延伸,第一围杆6穿设于通孔811。
44.参照图3,第一围杆6成型有两个夹板62,载物板42被夹持于两个夹板62之间,夹板62穿设并螺纹连接有两个锁紧螺栓61,锁紧螺栓61抵接于载物板42。在其他实施方式中,锁紧螺栓61也可设置为一个、三个或其他数量。
45.参照图4,顶梁34固定连接有安装杆31,本实施例中,安装杆31水平设置,且安装杆31垂直于顶梁34。安装杆31开设有沿安装杆31长度方向延伸的第三滑槽311,安装杆31设置有若干第二围杆7,本实施例中,第二围杆7设置有两个,第二围杆7卡设并滑移连接于第三滑槽311内,且两个第二围杆7分别位于货物沿安装杆31长度方向的两侧。安装杆31穿设并转动连接有螺杆71,螺杆71转动轴线平行于安装杆31长度方向,螺杆71同时穿设并螺纹连接于两个第二围杆7,且螺杆71位于两个第二围杆7的两端螺纹方向相反。
46.在其他实施方式中,第二围杆7可设置为三个、四个或其他数量,且多个第二围杆7分布于货物沿安装杆31长度方向的两侧。
47.在支撑板81上放置货物后,滑移第一围杆6,使得第一围杆6能够抵接于货物,随后紧固锁紧螺栓61,从而减小在运输过程中,货物掉落的可能性。然后转动螺杆71,使得螺杆71驱动第二围杆7滑移,并将第二围杆7抵接于货物,从而进一步减小货物掉落的可能性。
48.本技术实施例一种载物无人机的实施原理为:使用时,根据货物包装箱的大小,将载物板42滑移至所需位置,随后转动夹持螺栓422,然后将货物放置于支撑板81上,再滑动主动杆41,使得主动杆41控制载物板42在竖直方向上滑移。当货物被夹紧于支撑板81和顶梁34之间时,转动控制螺栓53,将主动杆41固定于竖杆32。
49.滑移第一围杆6,使得第一围杆6能够抵接于货物,随后紧固锁紧螺栓61,然后转动螺杆71,使得螺杆71驱动第二围杆7滑移,并将第二围杆7抵接于货物。
50.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。