1.本发明属于单人飞行器技术领域,具体涉及一种氢电双旋翼可折叠飞行机甲。
背景技术:
2.单人飞行器是指供个人使用的轻便飞行装置。现常见的单人飞行器有背负式时无动力飞行装置,对起飞条件具有要求,运动员需从飞机、热气球、悬崖绝壁、高楼大厦等高处一跃而下,飞行者运用肢体动作来掌控滑翔方向,用身体进行无动力空中飞行的运动,在到达安全极限的高度,运动员将打开降落伞平稳着落。背负式动力飞行装置,采用小型涡喷发动机提供动力,增加飞行者的身体负重。水上飞行器,它利用脚上喷水装置产生的反冲动力,让你可以在水面之上腾空而起。另外配备有手动控制的喷嘴,用于稳定空中飞行姿态。但用环境有限,只能在水面上进行。
技术实现要素:
3.本发明的目的是提供一种氢电双旋翼可折叠飞行机甲,具有自主智能飞行和人工驾驶操作两种飞行状态,同时可满足空中飞行和地面滑行两种工作状态,飞行者无负重,对飞行高度无要求。
4.本发明所采用的技术方案是,氢电双旋翼可折叠飞行机甲,包括与人体构造相适应的外骨骼主体和可视化头盔,外骨骼主体肩部上连接有双旋翼,外骨骼主体上侧安装有弹射安全氦气气囊;
5.外骨骼主体还包括两个外骨骼手臂和大腿臂,大腿臂通过内置的大腿臂电动推杆与外骨骼主体固定连接;外骨骼手臂通过外骨骼手臂铰链固定在外骨骼手臂铰链固定件上,外骨骼手臂铰链固定件通过外骨骼手臂转向轴固定在大腿臂上,大腿臂固定在外骨骼手臂铰链固定件上。
6.本发明的特点还在于,
7.在外骨骼主体肩部位置通过安全扣铰链固定有安全扣,外骨骼主体腰部还设置有安全带,安全带上设置有长度调节环,安全带上还设置有相互配合的子母扣嵌扣与子母扣按扣。
8.外骨骼主体上下左右均安装有激光雷达,大腿臂上固定有遮挡外壳,遮挡外壳内侧设置有用于固定腿部的魔术贴安全带;大腿臂内部安装有小腿臂电动推杆,小腿臂固定在小腿臂电动推杆上,小腿臂下部固定有减震弹簧安装大轴,减震弹簧安装大轴一侧安装有减震弹簧内轴;减震弹簧内轴另一侧固定在脚踏板上,减震弹簧内轴上嵌套有减震弹簧,脚踏板内部安装有从动轮转轴,从动轮转轴上安装有从动轮,脚踏板上还安装有照明灯。
9.外骨骼手臂分为左侧外骨骼手臂和右侧外骨骼手臂;其中左侧外骨骼手臂安装有左操控台,左操控台上安装有左遥控把手、工作状态两档开关及底部照明灯开关;右侧外骨骼手臂安装有右操控台,右操控台上安装有右遥控把手及设备总开关及工作模态两档开关;左操控台及右操控台均安装有灯光报警器;底部照明灯开关与照明灯电性连接;
10.大腿臂分为右侧大腿臂和左侧大腿臂,右侧大腿臂设置有右开关,升键,降键,航空插座;升键及降键用于控制小腿臂的高度;左侧大腿臂设置有左开关,开键,合键,外接usb接口;开键与合键用于控制两个大腿臂之间的间距。
11.外骨骼主体后背下方位置还安装有主动轮电机,主动轮电机上安装有主动轮电动推杆,主动轮电动推杆内安装有主动轮减震弹簧内轴,主动轮减震弹簧内轴上嵌套有主动轮减震弹簧;主动轮减震弹簧内轴固定在主动轮转向电机固定件上,主动轮转向电机固定件上固定有主动轮转向电机;主动轮转向电机通过主动轮转动电机固定件固定连接有主动轮转动电机,主动轮转动电机上安装有主动轮。
12.弹射安全氦气气囊包括固定在安全气囊固定件内的压缩氦气安全气囊以及安全气囊弹射壳,安全气囊弹射壳与安全气囊固定件固定连接形成一个内部空腔的结构;压缩氦气安全气囊上安装有气囊阀门,气囊阀门上安装有弹射触发器,气囊阀门上安装有安全气囊进气管,安全气囊进气管另一端安装在安全气囊内,弹射触发器和气囊阀门电连接到安全气囊控制板上,安全气囊下侧设置有绳索,绳索另一侧固定在绳索固定件上,绳索固定件固定在安全气囊固定件内壁上。
13.双旋翼包括旋翼主电机,旋翼主电机固定在主电机安装孔内,主电机安装孔设置在外骨骼主体肩部侧面位置;旋翼主电机上通过大臂电机固定件固定连接有大臂电机;大臂电机上固定有大臂;大臂内安装有辅臂电动推杆,辅臂电动推杆上固定有辅臂,辅臂前端固定有辅臂电机,辅臂电机上固定有转动电机固定件,转动电机固定件上安装有转动电机及工作指示灯,转动电机上通过旋翼电机固定件安装有旋翼电机以及旋翼。
14.外骨骼主体后背部位内还设置有氢气气罐,氢气气罐通过气管连接到氢氧燃料电堆;氢氧燃料电堆连接有空气压缩机,空气压缩机上设置有空气进气口;
15.氢气气罐罐口处设置有气罐电动阀门,气管靠近氢氧燃料电堆的一端设置有氢氧燃料电堆进气口阀门、另一端设置有充气口,充气口处设置有充气口阀门。
16.氢氧燃料电堆还电连接有蓄电池及微型主机,蓄电池与微型主机之间电连接,微型主机电连接有智能飞控模块,智能飞控模块还分别与主电机、大臂电机、辅臂电机、转动电机、旋翼电机、工作指示灯、辅臂电动推杆电性连接,用于控制双旋翼各个电机的转动,从而控制飞行机甲的飞行状态。
17.可视化头盔包括可视化头盔外壳,可视化头盔外壳上设置有显示器以及与显示器相连的显示器控制板模块,可视化头盔外壳两侧还分别内嵌有耳机,可视化头盔外壳内安装有微型投影仪,显示器下方还设置有呼吸阀,显示器控制板模块通过信号线连接有航空插头,航空插头与航空插座相匹配。
18.本发明的有益效果是:本发明的氢电双旋翼可折叠飞行机甲采用人体外骨骼与双旋翼相结合,同时,飞行者在使用时配备可视化头盔,可视化头盔可显示飞行位置地图信息,飞行速度、高度、加速度、工作模态、工作状态、电量等信息。采用氢氧燃料电堆供电;旋翼可折叠收纳到两侧,顶部配备有安全弹射气囊,可在危机情况下保证飞行者的安全,飞行者站在外骨骼内,飞行者无负重。
附图说明
19.图1是本发明氢电双旋翼可折叠飞行机甲在地面的整体示意图;
20.图2是本发明氢电双旋翼可折叠飞行机甲旋翼展开飞行示意图;
21.图3是本发明氢电双旋翼可折叠飞行机甲外骨骼主体侧面示意图;
22.图4是本发明氢电双旋翼可折叠飞行机甲后侧示意图;
23.图5是本发明氢电双旋翼可折叠飞行机甲主动轮示意图;
24.图6是本发明氢电双旋翼可折叠飞行机甲外骨骼手臂局部示意图;
25.图7是本发明氢电双旋翼可折叠飞行机甲安全气囊弹出示意图;
26.图8是本发明氢电双旋翼可折叠飞行机甲双旋翼整体示意图;
27.图9是本发明氢电双旋翼可折叠飞行机甲双旋翼辅臂收缩示意图;
28.图10是本发明氢电双旋翼可折叠飞行机甲氢氧燃料电堆示意图;
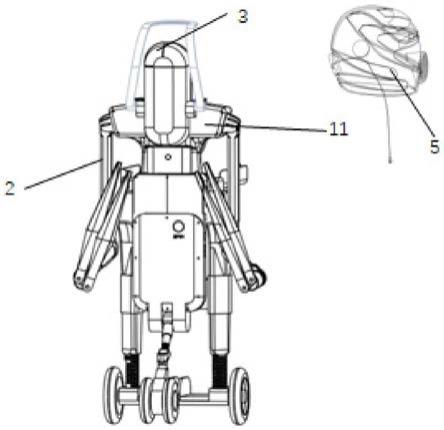
29.图11是本发明氢电双旋翼可折叠飞行机甲可视化头盔示意图;
30.图12是本发明氢电双旋翼可折叠飞行机甲智能飞控模块原理图;
31.图13是本发明氢电双旋翼可折叠飞行机甲可视化头盔工作原理图;
32.图14是本发明氢电双旋翼可折叠飞行机甲微型主机工作原理图;
33.图15是本发明氢电双旋翼可折叠飞行机甲整体工作原理图。
34.图中,2.双旋翼,3.弹射安全氦气气囊,5.可视化头盔。
35.11.外骨骼主体,12.安全扣,13.安全带,14.子母扣嵌扣,15.子母扣按扣,16.长度调节环,17.外骨骼手臂,18.大腿臂,19.遮挡外壳,20.魔术贴安全带,21.小腿臂,22.减震弹簧安装大轴,23.减震弹簧安装内轴,24.减震弹簧,25.可伸缩橡胶套,26.脚踏板,27.从动轮转轴,28.从动轮,29.右开关,30.升键,31.降键,33.安全扣铰链,34.主电机安装孔,35.激光雷达,36.左操控台,37.左操控把手,38.照明灯开关,39.右操控台,40.右操控把手,41.设备总开关,42.左开关,43.开键,44.合键,46.小腿臂电动推杆,47.主动轮电机,48.主动轮电动推杆,49.主动轮减震弹簧内轴,50.主动轮减震弹簧,51.主动轮转向电机固定件,52.主动轮转向电机,53.主动轮转动电机固定件,54.主动轮转动电机,55.主动轮,56.大腿臂电动推杆,57.外骨骼手臂转向轴,58.外骨骼手臂铰链固定件,59.外骨骼手臂铰链,60.灯光报警器,61.航空插座,62.照明灯,63.外接usb接口,64.工作模态两档开关,65.工作状态两档开关。
36.101.安全气囊固定件,102.安全气囊弹射壳,103.弹射触发器,104.安全气囊,105.绳索,106.绳索固定件,107.安全气囊控制板,108.压缩氦气安全气囊,109.气囊阀门,110,安全气囊进气管。
37.201.主电机,202.大臂电机固定件,203.大臂电机,204.大臂,205.辅臂,206.辅臂电机,207.转动电机固定件,208.转动电机,209.旋翼电机固定件,210旋翼电机,211.旋翼,212.工作指示灯,213.辅臂电动推杆。
38.301.氢气气罐,302.气罐电动阀门,303氢氧燃料电堆进气口阀门,304.氢氧燃料电堆,305.充气口,306.充气口阀门,307.空气压缩机,308.空气进气口,309.蓄电池,310.微型主机,311.智能飞控模块,312气管。
39.401.可视化头盔外壳,402.显示器控制板模块,403.微型投影仪,404.显示器,405.耳机,406.信号线,407.航空插头,408.呼吸阀。
具体实施方式
40.下面结合附图和具体实施方式对本发明进行详细说明。
41.如图1-4所示,氢电双旋翼可折叠飞行机甲,包括与人体构造相适应的外骨骼主体11和可视化头盔5,外骨骼主体11肩部上连接有双旋翼2,外骨骼主体11上侧安装有弹射安全氦气气囊3;
42.外骨骼主体11还包括两个外骨骼手臂17和大腿臂18,大腿臂18通过内置的大腿臂电动推杆56与外骨骼主体11固定连接;外骨骼手臂17通过外骨骼手臂铰链57固定在外骨骼手臂铰链固定件58上(如图6所示),外骨骼手臂铰链固定件58通过外骨骼手臂转向轴59固定在大腿臂18上,大腿臂18固定在外骨骼手臂铰链固定件58上。
43.在外骨骼主体11肩部位置通过安全扣铰链33固定有安全扣12,外骨骼主体11腰部还设置有安全带13,使用时,向下拉直合适位置即可;安全带13上设置有长度调节环16,安全带13上还设置有相互配合的子母扣嵌扣14与子母扣按扣15。
44.外骨骼主体11上下左右均安装有激光雷达35,大腿臂18上固定有遮挡外壳19,遮挡外壳19内侧设置有用于固定腿部的魔术贴安全带20;大腿臂18内部安装有小腿臂电动推杆46,小腿臂21固定在小腿臂电动推杆46上,小腿臂21下部固定有减震弹簧安装大轴22,减震弹簧安装大轴22一侧安装有减震弹簧内轴23;减震弹簧内轴23另一侧固定在脚踏板26上,减震弹簧内轴23上嵌套有减震弹簧24,脚踏板26内部安装有从动轮转轴27,从动轮转轴27上安装有从动轮28,脚踏板26上还安装有照明灯62。
45.外骨骼手臂17分为左侧外骨骼手臂和右侧外骨骼手臂;其中左侧外骨骼手臂安装有左操控台36,左操控台36上安装有左遥控把手37、工作状态两档开关65及底部照明灯开关38;右侧外骨骼手臂安装有右操控台39,右操控台39上安装有右遥控把手40及设备总开关41及工作模态两档开关64;左操控台36及右操控台39均安装有灯光报警器60;底部照明灯开关38与照明灯62电性连接;
46.大腿臂18分为右侧大腿臂和左侧大腿臂,右侧大腿臂设置有右开关29,升键30,降键31,航空插座61;升键30及降键31用于控制小腿臂21的高度;左侧大腿臂设置有左开关42,开键43,合键44,外接usb接口63;开键43与合键44用于控制两个大腿臂之间的间距。
47.如图4、5所示,外骨骼主体11后背下方位置还安装有主动轮电机47,主动轮电机47上安装有主动轮电动推杆48,主动轮电动推杆48内安装有主动轮减震弹簧内轴49,主动轮减震弹簧内轴49上嵌套有主动轮减震弹簧50;主动轮减震弹簧内轴49固定在主动轮转向电机固定件51上,主动轮转向电机固定件51上固定有主动轮转向电机52;主动轮转向电机52通过主动轮转动电机固定件53固定连接有主动轮转动电机54,主动轮转动电机54上安装有主动轮55;其中主动轮电机、主动轮转动电机、主动轮电动推杆、主动轮转向电机与主动轮控制板电性连接。
48.弹射安全氦气气囊3包括固定在安全气囊固定件101内的压缩氦气安全气囊108以及安全气囊弹射壳102,安全气囊弹射壳102与安全气囊固定件101固定连接形成一个内部空腔的结构;压缩氦气安全气囊108上安装有气囊阀门109,气囊阀门109上安装有弹射触发器103,气囊阀门109上安装有安全气囊进气管110,安全气囊进气管110另一端安装在安全气囊104内,弹射触发器103及气囊阀门109电连接到安全气囊控制板107上,安全气囊104下侧设置有绳索105,绳索105另一侧固定在绳索固定件106上,绳索固定件106固定在安全气
囊固定件101内壁上;弹射触发器103及气囊阀门均与安全气囊控制板电连接。
49.如图3、8、9所示,双旋翼2包括旋翼主电机201,旋翼主电机201固定在主电机安装孔34内,主电机安装孔34设置在外骨骼主体11肩部侧面位置;旋翼主电机201上通过大臂电机固定件202固定连接有大臂电机203;大臂电机203上固定有大臂204;大臂204内安装有辅臂电动推杆213,辅臂电动推杆213上固定有辅臂205,辅臂205前端固定有辅臂电机206,辅臂电机206上固定有转动电机固定件207,转动电机固定件207上安装有转动电机208及工作指示灯212,转动电机208上通过旋翼电机固定件209安装有旋翼电机210以及旋翼211。
50.如图3、4、10所示,外骨骼主体11后背部位内还设置有氢气气罐301,氢气气罐301通过气管312连接到氢氧燃料电堆304;氢氧燃料电堆304连接有空气压缩机307,空气压缩机307上设置有空气进气口308;
51.氢气气罐301罐口处设置有气罐电动阀门302,气管312靠近氢氧燃料电堆304的一端设置有氢氧燃料电堆进气口阀门303、另一端设置有充气口305,充气口305处设置有充气口阀门306。
52.氢氧燃料电堆304还电连接有蓄电池309及微型主机310,蓄电池309与微型主机310之间电连接,微型主机310电连接有智能飞控模块311,智能飞控模块311还分别与主电机201、大臂电机203、辅臂电机206、转动电机208、旋翼电机210、工作指示灯212、辅臂电动推杆213电性连接,用于控制双旋翼各个电机的转动,从而控制飞行机甲的飞行状态。
53.如图15所示,主动轮控制板、左右开关、激光雷达、usb外接口、底部照明灯开关、安全气囊控制板、左右遥控把手、usb外接口、工作模态两档开关,工作状态两档开关及设备总开关均与微型主机电性连接。
54.如图14所示,微型主机的cpu、内储存器、通讯模块、定位模块、系统软件均与微型主机总控制板连接,其中定位模快可为gps定位模块、北斗定位模块。
55.智能飞控模块包含陀螺仪、定位模块、地磁模块、舵机驱动模块、飞控主控制模块,其中,陀螺仪、定位模块、地磁模块、舵机驱动模块均与飞控主控制模块连接。
56.如图11所示,可视化头盔5包括可视化头盔外壳401,可视化头盔外壳401上设置有显示器404以及与显示器404相连的显示器控制板模块402,可视化头盔外壳401两侧还分别内嵌有耳机405,可视化头盔外壳401内安装有微型投影仪403,显示器404下方还设置有呼吸阀408,显示器控制板模块402通过信号线406连接有航空插头406,航空插头406与航空插座61相匹配。
57.参考附图12,氢氧燃料电堆为整个设备提供电源,氢氧燃料电堆为微型主机供电和蓄电池充电,同时,蓄电池也可为氢氧燃料电堆及微型主机提供基础电能,微型主机负责各个部分指令的发出、接收机传送,智能飞控模块主要负责控制飞行机甲的飞行,向主电机发送信号,控制整个旋翼的转动,智能飞控模块控制主臂电机电动主臂转动;智能飞控模块控制辅臂电机,控制旋翼前端的转动;智能飞控模块控制辅臂电动推杆带动辅臂的伸长与缩短;智能飞控模块控制工作指示灯的显示,智能飞控模块控制转动电机带动旋翼转动,实现飞行机甲的飞行;智能飞控模块控制叶片电机旋翼的折叠。
58.安全气囊控制板,控制弹射触发器的触动及灯光报警器的闪烁及蜂鸣报警。
59.左右开关按下后,微型主机为左右腿部控制板供电,开键与合键控制大腿臂电动推杆来调整大腿臂之间的宽度,升键和降键控制小腿臂电动推杆来调整小腿臂的高度。
60.主动轮控制板控制主动轮电机及主动轮的电动推杆,带动整个主动轮的折叠与收缩;主动轮控制板控制主动轮的转向电机及转动电机,带动主动轮的前进方向及行进速度。
61.氢电双旋翼可折叠伸缩飞行机甲具有2个工作模态:自主模态、人工操纵模态。(1)人工操纵模态是由飞行者人直接操纵飞行机甲。飞行者通过左右遥控把手操控飞行机甲进行工作。其中自主工作模态可人工干预,飞行者主动纠正飞行机甲自主飞行的偏差。(2)自主模态是飞行机甲按照飞行者制定的规则、路径、理念、思路进行工作,智能飞控模块及激光雷达配合工作,管控飞行机甲的飞行;飞行者可通过外接usb接口导入提前规划好的飞行路径。同时,氢电双旋翼可折叠伸缩飞行机甲具有空中飞行及地面滑行2个工作状态:
62.本发明氢电双旋翼单人飞行机甲在地面上时,双旋翼折叠收缩到背部两侧,主动轮向后伸缩落下,整体呈三角模式,保证飞行机甲在地面的稳定性,飞行者可按下大腿臂左开关,此时,开键与合键控制大腿臂电动推杆来调整大腿臂之间的宽度,进一步,也可按下大腿臂右侧开关,此时,升键和降键控制小腿臂电动推杆来调整小腿臂的高度。从而满足不同胖瘦与高度的飞行者使用。左右外骨骼手臂可手动上下左右调节位置。
63.待调整好位置后,飞行者戴好可视化头盔,将航空插头插到航空插座上,扣好腰部安全带,拉下安全扣至与胸腔贴紧,按下设备总开关,氢氧燃料电堆进入工作状态,开始供电。常规模式下,电双旋翼单人飞行机甲的工作状态为滑行模式,此时,左右遥控把手分别控制主动轮的前进与转向。
64.参考附图2,本发明氢电双旋翼单人飞行机甲在常规模式下,通过工作状态两档开关,可将运动模式调整为飞行模式,双旋翼向后侧方展开伸出,在后侧方呈v型,此时,左遥控把手控制飞行机甲的升降,右遥控把手控制飞行机甲前后左右。底部激光雷达探测距离,上升到一定高度后,主动轮收缩到与机甲平行位置,减少风阻。下降时,底部激光雷达探测距离,下降到一定高度后,主动轮向后展开,主动轮及从动轮均具有弹簧减震装置,缓解落地时的碰撞。当再次将运动模式调整为滑行模式时,双旋翼折叠收缩到背部两侧,降低氢电双旋翼单人飞行机甲整体宽度及占地空间。
65.工作状态中,头盔显示器可显示当前飞行机甲的飞行位置地图信息,飞行速度、高度、加速度、工作模态、工作状态、电量等信息。
66.参考附图7,飞行模式下,若出现危机情况,灯光报警器闪烁并蜂鸣报警,安全气囊控制板触动触发器,弹射触发器打开气囊阀门,安全气囊快速充气,将安全气囊弹射壳顶开弹出,将保证飞行者安全。