1.本技术涉及航空飞行器的无人机技术领域,特别是涉及一种无人机空基回收装置与方法。
背景技术:
2.集群无人机是在有人操控或自主下协同开展搜索、与有人机协同、干扰或攻击等行动。无人机集群可以在提高作战能力的同时有效降低作战成本,美国高度重视并正在开展无人机蜂群的研究。在美国公布的第六代战斗机模拟作战视频中,美军将集群无人机战术作为第六代战机相关战术的重要部分。集群无人机一般是中小型无人机,其自身固有的速度低、航时短、作战半径有限等缺点制约着集群无人机战术走向战场。所以,无人机的空基回收技术是无人机集群作战实用化的关键瓶颈技术。可以提升作战的机动性、突然性,并可有效减少作战损耗,所以快速、精准、高效的无人机空基回收技术不仅是无人机集群作战的关键技术,也是未来联合空战的一个重要核心关键技术。
3.无人机空基回收技术可以有效解决中小型无人机“腿短”的固有劣势,使其可以执行较远距离的任务,发挥集群无人机的战术优势。一般的空基发射回收集群无人机使用流程是由运输机、战斗机或轰炸机作为母机,将小型无人机带到任务区域上,然后进行空中投放,利用无人机集群作战优势,对目标区域进行侦察或者打击,任务结束后母机对集群无人机进行快速而又精准的回收。
4.在现有技术中,回收装置采用单点连接,无法控制无人机回收后的姿态,导致无人机存在滚动、俯仰、偏航三个方向上的姿态偏移。从而在无人机回收后,存在无人机和拖靶、母机碰撞的风险,导致无人机、拖靶、母机的损伤,影响回收安全。
技术实现要素:
5.(一)发明目的
6.本技术的目的是缓解无人机回收装置在无人机回收时,无法控制无人机姿态的技术问题,提出了一种基于航空拖靶无人机的空基回收装置。
7.(二)技术方案
8.根据一些实施例,本技术的第一方面提供了一种无人机空基回收装置,该回收装置包括固定滑轨、航空拖靶系统和回收系统;航空拖靶系统包括收放缆组件、伸缩臂、缆绳、回收托架和拖靶;固定滑轨安装在母机舱内,航空拖靶系统中收放缆组件及伸缩臂的一端安装在固定滑轨上,与固定滑轨之间存在固定滑轨方向上的平移运动;收放缆组件控制缆绳的收放,缆绳卷绕在收放缆组件中,缆绳的末端连接拖靶;回收托架安装于伸缩臂的另一端,伸缩臂沿垂直于固定滑轨方向伸缩,通过伸缩控制回收托架伸出、收回母机舱内;拖靶安装于回收托架下方,拖靶具有升降舵面和尾翼舵面,升降舵面调整拖靶飞行高度,尾翼舵面控制拖靶姿态;回收系统包括设置于拖靶下方的回收网、伸缩杆、对接组件,以及设置于无人机背部的后对接钩和前伸缩回收钩;伸缩杆上端连接拖靶的下部,下端连接对接组件,
伸缩杆沿垂直于拖靶方向伸缩;对接组件用于和无人机背部的后对接钩对接锁定;回收网内嵌于拖靶下腹部,用于和无人机背部的前伸缩回收钩对接锁定;后对接钩和前伸缩回收钩在无人机背部处于折叠状态,在无人机回收时展开;无人机回收时,母机舱门打开,伸缩臂通过伸长将回收托架和拖靶伸出母机舱外,收放缆组件放出缆绳,将拖靶从回收托架放出,无人机背部的后对接钩撞击对接组件锁定后,伸缩杆缩短,以使无人机背部的前伸缩回收钩插入回收网锁定;拖靶的重心、缆绳的悬挂点、升降舵面焦点位于相同的纵向位置。
9.可选地,无人机空基回收装置还包括:视觉引导设备和差分gps引导设备,视觉引导设备安装在拖靶后部,差分gps引导设备安装在拖靶内,两者一起引导无人机靠近对接组件。
10.可选地,缆绳全长600-900m。
11.可选地,缆绳的直径范围为2-7mm。
12.可选地,缆绳为钢制或光纤凯夫拉复合材料。
13.根据一些实施例,本技术的第二方面提供了一种利用本技术第一方面地空基回收装置进行无人机回收的方法,无人机回收时,母机舱门打开,收放缆组件、回收托架、拖靶通过固定滑轨滑动至母机舱门处,伸缩臂通过伸长将回收托架和拖靶置于母机舱外,收放缆组件释放缆绳,将拖靶从回收托架放出,到达指定高度,开始无人机回收;当无人机靠近对接组件时,后对接钩从无人机背部弹出展开,后对接钩和拖靶下方的对接组件撞击对接并锁死,前伸缩回收钩弹出展开,随着伸缩杆缩短,插入拖靶下腹部的回收网后锁定;无人机随收放缆组件回收缆绳与拖靶回到回收托架上,随着伸缩臂收回至母机舱内。
14.可选地,母机为运输机。
15.可选地,如果回收失败或发生意外,切断缆绳,保护母机。
16.(三)有益效果
17.本技术的上述技术方案具有如下有益的技术效果:通过在回收装置中设置对接组件与回收网结合的对接双重锁定方式,缓解了无人机回收后姿态无法控制的技术问题。
18.应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
附图说明
19.为了更清楚地说明本技术具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本技术的一种实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
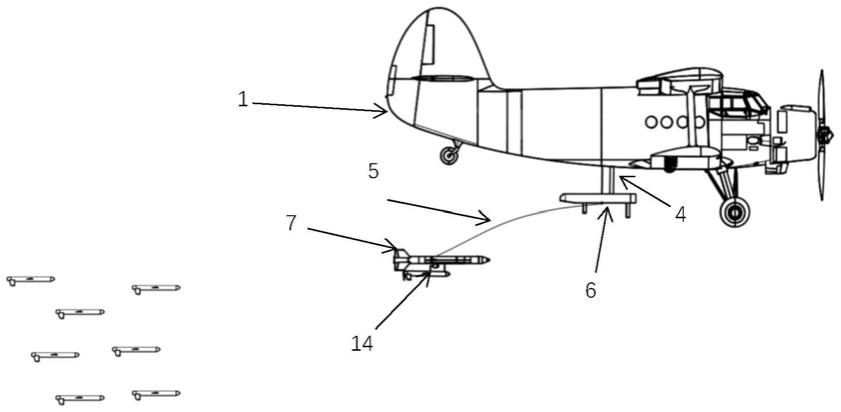
20.图1为本技术实施例一种无人机空基回收装置航空拖靶系统释放时状态示意图;
21.图2为本技术实施例一种无人机空基回收装置航空拖靶系统收起时状态示意图;
22.图3为本技术实施例一种无人机空基回收装置航空拖靶下腹部示意图;
23.图4为本技术实施例无人机接近拖靶下腹部的对接组件时的示意图;
24.图5为本技术实施例无人机背部后对接钩和拖靶下腹部的对接组件对接锁定时的示意图;
25.图6为本技术实施例无人机背部前伸缩回收钩和拖靶下腹部的回收网对接锁定时
的示意图;
26.图7为本技术实施例一种无人机空基回收方法流程示意图。
27.附图标记:
28.其中,1为母机,2为固定滑轨,3为放缆装置,4为伸缩臂,5为缆绳,6为回收托架,7为拖靶,8为视觉引导设备,9为回收网,10为伸缩杆,11为对接组件,12为后对接钩,13为前伸缩回收钩,14为无人机。
具体实施方式
29.为使本技术的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本技术进一步详细说明。应该理解,这些描述只是示例性的,而并非要限制本技术的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本技术的概念。
30.显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。以下将参照附图更详细地描述本技术。在各个附图中,相同的元件采用类似的附图标记来表示。为了清楚起见,附图中的各个部分没有按比例绘制。
31.本技术实施例提供的一种无人机空基回收装置,包括固定滑轨2、航空拖靶系统和回收系统。
32.图1为本技术实施例一种无人机空基回收装置航空拖靶系统释放时状态示意图;图2为本技术实施例一种无人机空基回收装置航空拖靶系统收起时状态示意图。
33.参考图1和图2,航空拖靶系统包括收放缆组件3、伸缩臂4、缆绳5、回收托架6和拖靶7;固定滑轨2安装在母机1舱内,航空拖靶系统中收放缆组件3及伸缩臂4的一端安装在固定滑轨2上,与固定滑轨2之间存在固定滑轨2方向上的平移运动;收放缆组件3控制缆绳5的收放,缆绳5卷绕在收放缆组件3中,缆绳5的末端连接拖靶7;回收托架6安装于伸缩臂4的另一端,伸缩臂4沿垂直于固定滑轨2方向伸缩,通过伸缩控制回收托架6伸出、收回母机1舱内;拖靶7安装于回收托架6下方,拖靶7具有升降舵面和尾翼舵面,升降舵面调整拖靶7飞行高度,尾翼舵面控制拖靶7姿态。
34.需要进行说明的是,通过收放缆组件3和缆绳5将拖靶7释放至远离母机1的位置,从而在无人机回收时,拖靶7和无人机均远离母机,气流扰动小,对母机1的安全性较好。拖靶7自身静稳定性大,尾翼舵面可精确控制拖靶姿态,升降舵面采用直接力的方式可在不影响拖靶7姿态的情况下精确调整拖靶飞行高度,有效缩短回收时间,提高回收效率。此外,航空拖靶系统可在滑轨2上移动,减少无人机回收时取下操作的时间,提高回收效率。
35.图3为本技术实施例一种无人机空基回收装置航空拖靶下腹部示意图;图4为本技术实施例无人机接近拖靶下腹部的对接组件时的示意图;图5为本技术实施例无人机背部后对接钩和拖靶下腹部的对接组件对接锁定时的示意图;图6为本技术实施例无人机背部前伸缩回收钩和拖靶下腹部的回收网对接锁定时的示意图。
36.参考图3—图6,本技术实施例回收系统包括设置于拖靶7下方的回收网9、伸缩杆10、对接组件11,以及设置于无人机背部的后对接钩12和前伸缩回收钩13;伸缩杆10上端连接拖靶7的下部,下端连接对接组件11,伸缩杆10沿垂直于拖靶7方向伸缩;对接组件11用于
和无人机14背部的后对接钩12对接锁定;回收网9内嵌于拖靶7下腹部,用于和无人机14背部的前伸缩回收钩13对接锁定;后对接钩12和前伸缩回收钩13在无人机14背部处于折叠状态,在无人机14回收时展开。
37.需要进行说明的是,采用无人机14背部的后对接钩12和前伸缩回收钩13,与拖靶7下方的对接组件11和回收网9对接锁死的方式,减少了回收后无人机14与回收装置碰撞对无人机14机体结构的损伤,保障了无人机14的安全。
38.无人机14回收时,母机1舱门打开,伸缩臂4通过伸长将回收托架6和拖靶7伸出母机1舱外,收放缆组件3放出缆绳5,将拖靶7从回收托架6上放出,无人机14背部的后对接钩12撞击对接组件11锁定后,伸缩杆10缩短,以使无人机14背部的前伸缩回收钩13插入回收网9锁定。拖靶7的重心、缆绳5的悬挂点、升降舵面焦点位于相同的纵向位置。
39.需要进行说明的是,采用拖靶7下腹部的伸缩杆10和对接组件11连接,回收过程中伸缩杆10伸出可以拉开拖靶7和无人机10的垂直距离,避免拖靶无人机的碰撞风险,保护无人机的安全,回收后伸缩杆10缩回,减小拖靶7和无人机14的垂直距离,提高无人机14和拖靶7回收时的稳定性。此外,后对接钩12撞击对接组件11锁定后,前伸缩回收钩13插入回收网9锁定,双重锁定的方式,使得回收后无人机的姿态与拖靶7保持一致。
40.无人机14靠近对接组件11,可以通过惯性导航、视觉导航、gps导航或其任意组合的导航方式。
41.在一个实施例中,无人机空基回收装置还包括:视觉引导设备8和差分gps引导设备,视觉引导设备8安装在拖靶7后部,差分gps引导设备安装在拖靶7内,两者一起引导无人机14靠近对接组件11。
42.在一个实施例中,缆绳5全长600-900m。
43.在一个实施例中,缆绳5的直径范围为2-7mm。
44.在一个实施例中,缆绳5为钢制或光纤凯夫拉复合材料。
45.图7为本技术实施例一种无人机空基回收方法流程示意图。
46.参考图7,本实施例提供的一种无人机空基回收方法包含以下三个步骤。
47.步骤s10:释放拖靶到指定高度。具体地,无人机14回收时,母机1舱门打开,收放缆组件3、回收托架6、拖靶7通过固定滑轨2滑动至母机1舱门处,伸缩臂4通过伸长将回收托架6和拖靶7置于母机1舱外,收放缆组件3释放缆绳5,将拖靶7从回收托架6上放出,到达指定高度,开始无人机回收。
48.步骤s11:拖靶与无人机对接锁定。具体地,当无人机14靠近对接组件11时,后对接钩12从无人机14背部弹出展开,后对接钩12和拖靶7下方的对接组件11撞击对接并锁死,前伸缩回收钩13弹出展开,随着伸缩杆10缩短,插入拖靶7下腹部的回收网9后锁定
49.在一个实施例中,母机1为运输机。8架起飞重量为10kg,航程为150km的小型折叠无人机14运输到600km以外的目标地点执行任务,无人机14任务完成后等待回收。回收时母机1首先放出回收托架6和拖靶7,收放缆组件3释放缆绳5,缆绳5总长600m。随缆绳5的释放,拖靶7和对接组件11下降至指定高度附近。无人机14从拖靶7后方接近,使用无人机背部的后对接钩12、前伸缩回收钩13按照顺序与拖靶7下方的对接组件11、回收网9撞击、对接并锁死。
50.步骤s12:收回拖靶至母机舱内。具体地,无人机14随收放缆组件3回收缆绳5与拖
靶7回到回收托架6上,随着伸缩臂4收回至母机1舱内。
51.在一个实施例中,如果回收失败或发生意外,切断缆绳5,保护母机1。
52.本技术说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。本技术的上述实施例是对方案的说明而不能用于限制本技术,与本技术有保护范围相当的含义和范围内的任何改变,都应认为是包括在本技术保护的范围内。