1.本发明属于太阳能无人机设计领域,尤其是涉及一种表面发电蒙皮可抽拉的太阳能无人机及供电方法。
背景技术:
2.为提高固定翼无人机的续航时间,扩大其动力来源的范围,目前使用太阳能电池作为辅助动力来源成为一种新的解决途径,如何高效的利用太阳能电池,使其具备整体结构重量轻、巡航时间长等优势,是无人机行业亟待解决的问题。5g技术发展越来越快,给数据超远距离实时传输提供了可能,越来越的行业进入5g+的时代,将5g与无人机领域相结合,实现超视距控制也是当今无人机领域的一大发展方向。
3.对于常规的太阳能无人机,在遇到恶劣天气时,其表面太阳能电池的保护存在一定问题,在光照充足的天气,太阳能电池的覆盖在无人机表面,如何减轻整体重量也是一大问题。
技术实现要素:
4.本发明要解决的问题是提供一种表面发电蒙皮可抽拉的太阳能无人机及供电方法,可拆卸的碳纤维上壳与柔性太阳能发电蒙皮在不同天气下,互相配合使用,提高了无人机的能源供能及巡航能力,最大程度上优化了无人机重量。
5.为解决上述技术问题,本发明采用的技术方案是:一种表面发电蒙皮可抽拉的太阳能无人机,包括:机身模块、发电蒙皮、储能电池、智能驱动模块,所述机身模块的至少一侧机翼上表面包覆设置有所述发电蒙皮;
6.所述智能驱动模块设置于所述机身模块的机身内,用于调控供电电路;
7.在恶劣天气情况下,所述发电蒙皮收纳于至少一侧的所述机翼中,所述智能驱动模块驱动储能电池供电;
8.在正常天气情况下,所述发电蒙皮包覆于至少一侧的所述机翼上,所述智能驱动模块驱动所述发电蒙皮供电。
9.进一步的,所述机翼包括机翼外壳和设置于所述机翼内部的支架,所述机翼支架用于支撑所述机翼外壳。
10.进一步的,所述机身模块的至少一侧的所述机翼外壳的上表面可拆卸的设置有上壳,在恶劣天气情况下,所述上壳设置于所述机翼的上表面;
11.在正常天气情况下,所述上壳被拆除于所述机翼的上表面。
12.进一步的,所述发电蒙皮缠绕于至少一侧的所述机翼内部的抽拉卷轴上,所述机翼的下表面设置可供所述发电蒙皮抽出的抽拉口;
13.在正常天气情况下,从所述抽拉口抽拉出的所述发电蒙皮贴合所述机翼的上表面设置,所述发电蒙皮远离所述抽拉卷轴的一侧连接于所述机翼的尾端。
14.进一步的,还包括通信传输模块,所述通信传输模块设置于所述机身模块的机身
内,用于实现无人机飞控的数据信息与地面设备之间的信息互传。
15.进一步的,无人机上还安装有测量光辐照度的传感器,所述传感器将测量数据反馈给所述智能驱动模块。
16.为实现上述目的,本发明还提供一种表面发电蒙皮可抽拉的太阳能无人机的供电方法,步骤为:
17.在所述无人机执行飞行任务过程中,判断天气情况,并根据判断结果调控所述供电电路。
18.进一步的,在恶劣天气情况下,所述机翼上表面被上壳覆盖,所述发电蒙皮设置于所述机翼内部;所述智能驱动模块运行模式1,所述无人机直接由所述储能电池供电;
19.在正常天气下,从所述机翼上表面拆除所述上壳,从所述抽拉口抽出所述发电蒙皮,将所述发电蒙皮贴合所述机翼上表面设置,判断光辐照度。
20.进一步的,无人机上还安装有测量光辐照度的传感器,所述传感器将测量数据反馈给所述智能驱动模块,所述智能驱动模块判定所述光辐照度,并根据判定结果调所述控供电电路。
21.进一步的,当所述光辐照度小于500w/
㎡
时,所述智能驱动模块运行模式2,所述发电蒙皮与所述储能电池同时为所述无人机供电;
22.当所述光辐照度500-750w/
㎡
时,所述智能驱动模块运行模式3,所述发电蒙皮为所述无人机供电,所述储能电池用于所述光辐照度突然不足时,起应急补充作用;
23.当所述光辐照度超过750w/
㎡
时,所述智能驱动模块运行模式4,所述发电蒙皮为所述无人机供电同时为所述储能电池充电。
24.由于采用上述技术方案,具有以下有益效果:
25.1.可拆卸的碳纤维上壳与柔性太阳能发电蒙皮在不同天气下,互相配合使用,提高了无人机的能源供能及巡航能力,最大程度上优化了无人机重量。
26.2.智能驱动模块,对不同天气状况,给出不同的供电控制模式,极大的避免了能源的浪费,实现无人机的高效巡航
27.3.5g传输模块的搭载,依托5g强大的超远距离传输能力,实现无人机的超视距控制。
附图说明
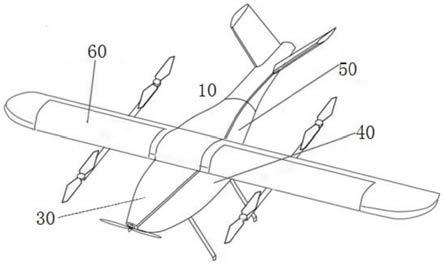
28.图1是本发明一种实施例的无人机整体结构示意图;
29.图2是本发明一种实施例的恶劣情况下机翼示意图;
30.图3是本发明一种实施例的正常情况下机翼示意图;
31.图4是本发明一种实施例的智能驱动模块控制流程图。
32.图中:
33.10、机身模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
20、发电蒙皮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
30、储能电池
34.40、智能驱动模块
ꢀꢀꢀꢀꢀꢀꢀ
50、通信传输模块
ꢀꢀꢀꢀꢀ
60、机翼
35.61、机翼外壳
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
62、支架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
63、上壳
36.64、抽拉卷轴
具体实施方式
37.下面结合实施例和附图对本发明作进一步说明:
38.在本发明的一种实施例中,如图1所示,一种表面发电蒙皮可抽拉的太阳能无人机,包括:机身模块10、发电蒙皮20、储能电池30、智能驱动模块40、通信传输模块50和传感器,机身模块10的至少一侧机翼60上表面包覆设置有发电蒙皮20;智能驱动模块40、通信传输模块50和传感器均设置于机身模块10的机身内,其中智能驱动模块40用于调控供电电路,通信传输模块50用于接收飞控的数据信息输给地面设备进行控制,传感器用于测量光辐强度。
39.在工作过程中,传感器将测量到的光辐照度数据反馈给智能驱动模块40,并在智能驱动模块40中进行判断,对供电电路进行调控,在通过通信传输模块50与地面设备进行双向的数据信息传递。
40.在恶劣天气情况下,发电蒙皮20收纳于至少一侧的机翼60中,智能驱动模块40驱动储能电池30供电;在正常天气情况下,发电蒙皮20包覆于至少一侧的机翼60上,智能驱动模块40驱动发电蒙皮20供电。
41.在本实施例中,规定恶劣天气为具有破坏性的雷雨天气、大风天气等,正常天气为恶劣天气之外的较平稳气象的天气。
42.在本实施例中,机身模块10的的两侧机翼60上均包覆设置有发电蒙皮20。如图2-3所示中,机翼60包括机翼外壳61和设置于机翼60内部的机翼支架62,机翼支架62用于支撑机翼外壳61。在本实施例中,机翼60采用流线型结构,减少空气阻力的同时外观更加美观,机翼支架62采用碳纤维支架,该机翼支架62的外形结构与机翼外壳61的外形结构相符,即机翼支架沿机翼外壳61的形状支设,如图2-3所示。
43.机身采模块10为固定翼与多旋翼结合的构造,固定翼即为本实施例中的机翼60,如图1所示,多旋翼在两个侧翼上对称设置。其中机身模块10的至少一侧的机翼60的上表面可拆卸的设置有上壳63,在恶劣天气情况下,上壳63设置于机翼60的上表面;在光照天气情况下,将上壳63从机翼60的上表面移除。发电蒙皮20缠绕于至少一侧的机翼60内部的抽拉卷轴64上,机翼60下表面设置可供发电蒙皮20抽出的抽拉口65;在光照天气情况下,从抽拉口65抽拉出的发电蒙皮20贴合机翼60的上表面设置,发电蒙皮20远离抽拉卷轴64的一侧连接于机翼60的尾端。
44.在本实施例中,如图2-3所示中,无人机的两侧的机翼60上表面均可拆卸的设置有上壳63,上壳63同样采用碳纤维外壳,无人机两侧的机翼60前缘下侧均可抽拉出柔性太阳能发电蒙皮20,该发电蒙皮20覆盖在机翼60表面,该发电蒙皮20抽拉出的那一侧通过开口伸入机翼60的内部,并依靠锁扣锁定与机翼60内部的尾端。
45.在恶劣天气情况下,将碳纤维材质的上壳63覆盖在两侧机翼60的上方,完成无人机的飞行任务,进一步对无人机进行了保护;在正常天气情况下,可将两侧机翼60的碳纤维的上壳63拆除,从机翼60前缘下侧抽拉出柔性太阳能发电蒙皮20,使其铺设在机翼60的上表面,机翼60内部的碳纤维支架对柔性太阳能发电蒙皮起支撑作用,使太阳能发电蒙皮表面保持较好的翼型状态,并依靠锁扣将太阳能发电蒙皮60拉紧固定。
46.如图1所示中,机身内部安装智能驱动模块40,可依据是否铺设柔性太阳能发电蒙皮及光照是否充足来切换无人机供电回路。在本实施例中,智能驱动模块40包含如图4所示
的4种模式:
47.模式1:在未铺设柔性太阳能发电蒙皮20时,无人机系统由储能电池30供电;
48.在铺设柔性太阳能发电蒙皮20时,其智能驱动模块40可依据光照是否充足,启动模式2、模式3或模式4运行。
49.模式2:太阳能发电蒙皮与储能电池30同时为无人机系统供电;
50.模式3:太阳能发电蒙皮单独为无人机系统供电,储能电池30处于应急电源状态;
51.模式4:太阳能发电蒙皮为无人机系统供电,且为储能电池30充电。
52.在本实施例中,通信传输模块50为5g传输模块,无人机飞控信息可依靠5g传输模块传输至固定ip地址,实现超视距控制。具体的,通过无人机本身是有一个独立的飞控模块的来对无人机的起飞,降落,定点航行之类的进行控制。无人机飞控与5g传输模块直接连接,无人机控制及状态数据不解码直接传送至5g传输模块,无人机控制及状态数据将通过5g链路传输至固定ip地址,在地面设备上接收无人机控制及状态数据,并在地面站内完成解码工作。同时地面站发出的控制数据在内部完成编码后,通过5g传输链路反馈给5g传输模块,进而再传输给无人机飞控,在飞控内完成解码,并进行相应的控制。
53.本发明的一种实施例的工作过程为:
54.在无人机执行飞行任务过程中,直接人为判断天气情况,并根据判断结果调控供电电路。
55.在具有破坏性的恶劣天气情况下,上壳63覆盖于机翼60的上表面;机翼60上侧采用碳纤维壳体覆盖,智能驱动模块20处于模式1运行,无人机直接由储能电池30供电,柔性太阳能发电蒙皮20位于机身内部。
56.在正常天气下,拆除机翼60上侧的碳纤维上壳63,从机翼60前缘下侧的抽拉口65抽出发电蒙皮20,并将发电蒙皮20贴合机翼60上表面设置,并利用锁扣完成拉紧锁定,同时继续判断光辐照度:
57.传感器将测量到的光辐照度数据反馈给智能驱动模块40,智能驱动模块40判定光辐照度,并根据判定结果调控供电电路。
58.当光辐照度在小于500w/
㎡
时即为光照不足情况。当光照不足时,智能驱动模块40处于模式2,太阳能发电蒙皮20与储能电池30同时为无人机系统上的设备协同供电;
59.当光辐照度在500~750w/
㎡
时即为光照较充足情况。当光照较充足时,智能驱动模块40处于模式3,无人机上的设备由柔性太阳能发电蒙皮20供电,此时储能电池30处于应急电源状态,当光照突然不足时,起补充作用。太阳能发电蒙皮单独为无人机系统供电,储能电池处于应急电源状态;
60.当光辐照度在超过750w/
㎡
时即为光照较充足情况。当光照非常强时,智能驱动模块处于模式4,无人机上的设备由柔性太阳能发电蒙皮20供电,且太阳能发电蒙皮20还有部分余电来为储能电池30充电。
61.在上述步骤的基础上,无人机飞控与5g传输模块直接相连,无人机控制及状态数据不解码直接传送至5g传输模块,5g传输模块将接收到的飞控数据信息(无人机控制及状态数据)通过5g链路传输至指定ip的地面设备,地面设备上的地面站接收无人机控制及状态数据,对此信息进行解码读取,进而产生新的控制信息,再依靠5g链路反馈给无人机飞控,完成无人机通过5g传输模块与地面设备进行信息交互任务,实现无人机的超视距控制。
62.本发明通过可拆卸的碳纤维机翼上壳,在恶劣天气时,表面安装碳纤维上壳,增强无人机结构强度,在正常天气时,拆除碳纤维上壳,由机翼前缘下侧抽出柔性太阳能发电蒙皮,使其覆盖在机翼上侧,机翼内部的碳纤维支架起支撑作用,使其具备较好的翼型,机身内部的智能驱动模块,可依据有无太阳能发电蒙皮以及光照的强度来实时调控无人机的供电回路,达到能源的高效利用;机身内的5g传输模块,直接接收飞控的数据信息,通过5g链路传输给地面设备,依托5g技术实现无人机的超视距控制。
63.以上对本发明的实施例进行了详细说明,但所述内容仅为本发明的较佳实施例,不能被认为用于限定本发明的实施范围。凡依本发明申请范围所作的均等变化与改进等,均应仍归属于本发明的专利涵盖范围之内。