1.本实用新型属于无人机站设备技术领域,具体涉及一种无人机站。
背景技术:
2.随着作为无人驾驶飞行器的无人机的技术的发展,该无人机被用于各种领域。无人机是通过使用电池的电力来旋转多个螺旋桨而在空中飞行的一种飞行装置。无人机被配置为根据用户的遥控器的操作以各种模式飞行。
3.无人机于电池消耗量非常高,因此无人机需要对电池进行充电,以用于长时间飞行,现有的无人机降落设备采用视觉的信标识别或基于卫星定位,定位精度低、信标易受其它光源干扰;且无人机仅使用gps信息着陆在无人机站,所以存在如下问题:无人机站和无人机之间的共振中心未精确对准,从而降低了充电效率可靠性,并且由于充电效率可靠性的降低而增加了充电时间,无法实现自动充电或更换电池;并且机载设备不易更换。
4.因此,提出一种无人机站以解决现有技术中存在的不足。
技术实现要素:
5.本实用新型为了解决上述技术问题提供无人机站,三层结构分别放置无人机机体、备用电池以及机载设备;支持实现无人机自动起降、电池自动更换、电池自动充放电管理、机载设备自动更换;整体设计简洁、控制简单、可靠性高。
6.本实用新型解决上述技术问题的技术方案如下:本无人机站包括从上往下依次设置的用于停放无人机的上层板、中层板和底板,所述底板上设置多个用于支撑所述上层板和所述中层板的支撑柱,所述上层板上设有圆形槽,所述中层板呈环形,所述中层板上环向设置有多个充电仓,所述圆形槽内设有用于定位无人机更换备用电池位置的定位组件,所述中层板内设有用于驱动多个所述充电仓移动的电池驱动件和用于装卸无人机的备用电池的装卸电池组件,所述底板的中部上环向间隔设置有多个用于装卸无人机的机载设备的装卸机载设备组件,所述底板上设有用于引导无人机精准降落的载波激光发射器。
7.有益效果:三层结构分别放置无人机机体、备用电池以及机载设备;支持实现无人机自动起降、电池自动更换、电池自动充放电管理、机载设备自动更换;整体设计简洁、控制简单、可靠性高。
8.进一步,所述定位组件包括承载齿环、齿环驱动齿轮、对中拨杆和拨杆驱动舵机,所述承载齿环转动设置在所述圆形槽内,所述齿环驱动齿轮设置在所述上层板上,所述齿环驱动齿轮与所述承载齿环啮合连接,所述齿环驱动齿轮与设置在所述上层板底部上的齿环驱动电机的输出端传动连接,所述上层板底部环向间隔设置有多个所述拨杆驱动舵机,所述拨杆驱动舵机的输出端传动连接所述对中拨杆。
9.采用上述进一步方案的有益效果是:当无人机降落至承载齿环上,先通过拨杆驱动舵机驱动对中拨杆把无人机推动中间位置,再由齿环驱动齿轮驱动承载齿环转动使无人机的电池仓出口对准可用于更换的备用电池位置。
10.进一步,所述圆形槽内还垂直设置有两组用于与检测无人机是否在站内的第一激光测距传感器。
11.采用上述进一步方案的有益效果是:准确判断无人机是否已降落在站内。
12.进一步,所述上层板上设有用于定位无人机更换电池位置的光电传感器。
13.采用上述进一步方案的有益效果是:判别无人机是否转动到更换电池的位置。
14.进一步,所述电池驱动件包括电池仓驱动电机和电池仓驱动轮,所述电池仓驱动电机安装在安装板上,所述安装板固定在一所述支撑柱上,所述电池仓驱动电机的输出端传动连接所述电池仓驱动轮,所述中层板内设有环形的被动齿轮,所述电池仓驱动轮与所述被动齿轮啮合连接。
15.采用上述进一步方案的有益效果是:电池仓驱动电机驱动电池仓驱动轮带动电池仓转动,转动到无人机需要更换备用电池的正确位置。
16.进一步,所述装卸电池组件包括升降电机、电池装卸桥驱动舵机、电池装卸运载桥、电池装卸蜗杆驱动电机、电池装卸蜗杆、电池装卸涡轮和电池装卸驱动齿轮,所述升降电机的中部竖直设置有贯通所述升降电机的升降电机蜗杆,所述升降电机蜗杆通过安装基板固定设置在所述安装板上,所述升降电机固定连接所述电池装卸桥驱动舵机,所述电池装卸桥驱动舵机的输出端枢接所述电池装卸运载桥,所述电池装卸运载桥上间隔且平行设置多组所述电池装卸驱动齿轮,所述电池装卸运载桥的底部设有所述电池装卸蜗杆,每组所述电池装卸驱动齿轮通过转轴连接,所述转轴上设有与所述电池装卸驱动齿轮啮合的所述电池装卸涡轮,所述电池装卸运载桥的底部设有用于驱动所述电池装卸蜗杆的所述电池装卸蜗杆驱动电机。
17.采用上述进一步方案的有益效果是:通过升降电机控制整个电池装卸运载桥的高度,电池装卸蜗杆驱动电机驱动通过蜗轮蜗杆驱动电池装卸驱动齿轮对电池往返装卸。
18.进一步,所述电池装卸运载桥的前端底部设有第一位置对准传感器,所述底板的中心处设有用于与所述第一位置对准传感器配合的第一激光探针,保证拆卸电池过程中,所述电池装卸运载桥、无人机电池仓和所述充电仓在同一直线上,所述电池装卸运载桥的后端设有第二位置对准传感器,所述中层板的底部设有用于定位零号电池仓的第二激光探针,保证安装电池过程中,所述电池装卸运载桥、无人机电池仓和所述充电仓在同一直线上。
19.采用上述进一步方案的有益效果是:通过第一位置对准传感器和第二位置对准传感器能精准定位,使无论在电池安装和拆卸的过程中,电池装卸运载桥、无人机电池仓和所述充电仓在同一直线上。
20.进一步,所述装卸机载设备组件包括三角架、轴承支架、滑槽、滚轮、水平驱动电机、减速机、水平驱动齿轮、齿条、机载设备驱动连接组件、滑轨、机载设备托架和机载设备滑槽,所述三角架的底部相对两侧均设有多个所述轴承支架,所述轴承支架固定在所述底板上,所述轴承支架上转动设置有所述滚轮,所述三角架相对侧壁上均设有所述滑槽所述滚轮滑动设置在所述滑槽内,所述三角架上设有所述水平驱动电机和所述减速机,所述水平驱动电机的输出端连接所述减速机,所述减速机的输出端连接所述水平驱动齿轮,所述水平驱动齿轮啮合连接有所述齿条,所述齿条固定在所述底板上,所述三角架的顶部设有所述机载设备托架,所述机载设备托架的一端上设有供所述无人机上的旋转支架通过的所
述机载设备滑槽,所述三角架上设有用于卡接所述旋转支架后,驱动所述旋转支架滑动到所述的机载设备滑槽内的所述机载设备驱动连接组件。
21.采用上述进一步方案的有益效果是:三角架下方通过机载设备驱动电机推拉机载设备,三角架能在底板的径向上来回移动,以对准无人机挂载架实现安装和卸载设备。
22.进一步,所述机载设备驱动连接组件包括机载设备驱动电机、推杆和挂钩,所述机载设备驱动电机安装在所述三角架上,所述机载设备驱动电机的输出端螺纹连接有所述推杆,所述推杆上固定设有用于卡接所述旋转支架的挂钩。
23.采用上述进一步方案的有益效果是:机载设备驱动电机驱动推杆的来回移动,使无人机底部的旋转支架卡接在挂钩上,带动旋转支架在机载设备滑槽内,从而实现机载设备的安置和卸载。
24.进一步,所述三角架的顶部设有用于机载设备导向的滑轨,所述滑轨与所述机载设备滑槽处在同一条直线上。
25.采用上述进一步方案的有益效果是:起到导向作用,便于精准定位。
附图说明
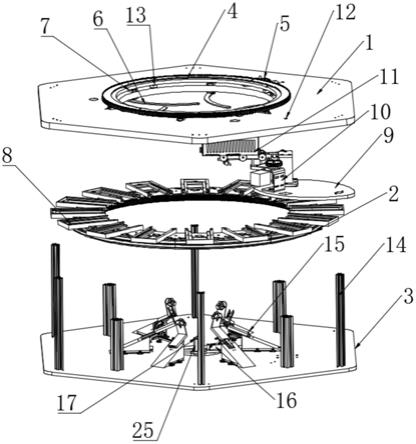
26.图1为本实用新型的爆炸结构示意图;
27.图2为无人机降落无人机站的示意图;
28.图3为中层板上的电池仓的安装位置示意图;
29.图4为底板上的装卸机载设备组件安装位置示意图;
30.图5为电池驱动件和装卸电池组件的结构示意图;
31.图6为装卸电池组件安装和拆卸电池的示意图;
32.图7为装卸机载设备组件的结构示意图;
33.图8为旋转支架的结构示意图;
34.附图中,各标号所代表的部件列表如下:
35.1、上层板;2、中层板;3、底板;4、承载齿环;5、齿环驱动齿轮;6、对中拨杆;7、拨杆驱动舵机;8、充电仓;9、安装板;10、电池驱动件;101、电池仓驱动电机;102、电池仓驱动轮;11、装卸电池组件;111、升降电机;112、电池装卸桥驱动舵机;113、电池装卸运载桥;114、电池装卸蜗杆驱动电机;115、电池装卸蜗杆;116、电池装卸涡轮;117、电池装卸驱动齿轮;12、光电传感器;13、第一激光测距传感器;14、支撑柱;15、装卸机载设备组件;151、三角架;152、轴承支架;153、滑槽;154、滚轮;155、水平驱动电机;156、减速机;157、水平驱动齿轮;158、齿条;16、第二激光测距传感器;17、第一激光探针;18、无人机;19、旋转支架;191、下支撑板;192、上支撑架;193、锁紧件;194、旋转电机;195、卡孔;20、备用电池;21、第二位置对准传感器;22、第二激光探针;23、安装基板;24、第一位置对准传感器;25、载波激光发射器。
具体实施方式
36.以下结合附图对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。
37.实施例1
38.如图1-2示,本实施例提供无人机站,包括:从上往下依次设置的用于停放无人机
18的上层板1、中层板2和底板3,所述底板3上设置多个用于支撑所述上层板1和所述中层板2的支撑柱14,支撑柱14的数量根据实际情况而定,用于固定中层板2的支撑柱14的顶部固定连接在中层板2的底部,用于固定上层板1的支撑柱14的顶部固定连接在上层板1的底部,所述上层板1上设有圆形槽,所述中层板2呈环形,所述中层板2上环向设置有多个充电仓8,电池仓18是无人机站的电池存储、充电的位置,为环形转盘结构,环形转盘上围绕一圈的16个电池充电仓位,每个仓位都有独立的充电和电源管理电路,环形转盘上最多安装16个电池仓位,采用环形设计适配无人机站的环状结构,能够有效利用机站空间;环形转盘带内齿环由步进电机齿轮驱动其旋转,选取空位存放无人机的电池或选取充满电的电池供无人机使用,控制简单方便。所述圆形槽内设有用于定位无人机18更换备用电池20位置的定位组件,所述中层板2内设有用于驱动多个所述充电仓8移动的电池驱动件10和用于装卸无人机18的备用电池20的装卸电池组件11,所述底板3的中部上环向间隔设置有多个用于装卸无人机18的机载设备的装卸机载设备组件15。
39.优选地,本实施例中,所述定位组件包括承载齿环4、齿环驱动齿轮5、对中拨杆6和拨杆驱动舵机7,所述承载齿环4转动设置在所述圆形槽内,所述齿环驱动齿轮5转动设置在所述上层板1上,所述齿环驱动齿轮5与所述承载齿环4啮合连接,所述齿环驱动齿轮5与设置在所述上层板1底部上的齿环驱动电机的输出端传动连接,所述上层板1底部环向间隔设置有多个所述拨杆驱动舵机7,所述拨杆驱动舵机7的输出端传动连接所述对中拨杆6;所述圆形槽内还垂直设置有两组用于与检测无人机是否在站内的第一激光测距传感器13;所述上层板1上设有用于定位无人机18更换电池位置的光电传感器12。
40.机站上层装有可转动的无人机承载齿环4,承载环带外齿环,由拨杆驱动舵机7驱动齿环驱动齿轮5带动其转动从而实现调整无人机方向;由上层板1上的两个光电传感器12判别无人机是否转动到更换电池的位置;承载齿环4下方安装沿环形均匀分布的6根由舵机控制的对中拨杆6用于将无人机位置调整到机站中心位置;两组互相垂直的第一激光测距传感器13用于判断无人机18是否进舱以及位置是否到中心。
41.优选地,本实施例中,如图5所示,所述电池驱动件10包括电池仓驱动电机101和电池仓驱动轮102,所述电池仓驱动电机101安装在安装板9上,所述安装板9固定在一所述支撑柱14上,所述电池仓驱动电机101的输出端传动连接所述电池仓驱动轮102,所述中层板2内设有环形的被动齿轮,所述电池仓驱动轮102与所述被动齿轮啮合连接,电池仓驱动电机101驱动电池仓驱动轮102带动电池仓转动,转动到无人机需要更换备用电池的正确位置。
42.优选地,本实施例中,如图6所示,所述装卸电池组件11包括升降电机111、电池装卸桥驱动舵机112、电池装卸运载桥113、电池装卸蜗杆驱动电机114、电池装卸蜗杆115、电池装卸涡轮116和电池装卸驱动齿轮117,所述升降电机111的中部竖直设置有贯通所述升降电机111的升降电机蜗杆,所述升降电机蜗杆通过安装基板23固定设置在所述安装板9上,所述升降电机111固定连接所述电池装卸桥驱动舵机112,所述电池装卸桥驱动舵机112的输出端枢接所述电池装卸运载桥113,所述电池装卸运载桥113上间隔且平行设置多组所述电池装卸驱动齿轮117,所述电池装卸运载桥113的底部设有所述电池装卸蜗杆115,每组所述电池装卸驱动齿轮117通过转轴连接,所述转轴上设有与所述电池装卸驱动齿轮117啮合的所述电池装卸涡轮116,所述电池装卸运载桥113的底部设有用于驱动所述电池装卸蜗杆115的所述电池装卸蜗杆驱动电机114;所述电池装卸运载桥113的前端底部设有第一位
置对准传感器24,所述底板3的中心处设有用于与所述第一位置对准传感器24配合的第一激光探针17,保证拆卸电池过程中,所述电池装卸运载桥113、无人机18电池仓和所述充电仓8在同一直线上,所述电池装卸运载桥113的后端设有第二位置对准传感器21,所述中层板2的底部设有用于定位零号电池仓的第二激光探针22,保证安装电池过程中,所述电池装卸运载桥113、无人机18电池仓和所述充电仓8在同一直线上,所述底板3上还设有第二激光测距传感器16,用于定位无人机18的位置,便于进行安装和拆卸电池。
43.无人机18居中并将电池仓对准更换电池位置后,电池装卸运载桥113通过电池装卸运载桥113旋转,电池装卸桥驱动舵机112控制旋转并通过第一位置对准传感器18对准无人机电池仓,第一位置对准传感器24为电池装卸运载桥113与无人机18的位置对准传感器,由小型激光发射器、接收器和反光片组成,激光发射器发射直线光源,通过反光片设计来使得光源反射到无人机18和电池仓的激光接收器位置,从而使得电池装卸运载桥113、无人机电池仓和充电仓8在同一直线上。之后,电池装卸运载桥113的升降电机111控制桥体与无人机电池仓对接,使得桥上的电池装卸驱动齿轮117与电池下面的齿条啮合从而拉动电池,升降电机111为贯通丝杆步进电机;当电池完全被运送上桥后,升降电机111继续控制桥体与充电仓位保持同一高度以使得电池能够被推送到充电位中。
44.反之,给无人机安装电池的过程,装卸运载桥通过电池装卸运载桥旋转驱动舵机旋转并通过第二位置对准传感器21对准无人机电池仓,由于电池装卸运载桥113、无人机电池仓和充电仓8在同一直线上,桥也就对准了充电仓;电池装卸运载桥升降电机控制桥体与充电仓位保持同一高度以使得电池能够被从充电位拉出,电池装卸驱动齿轮117带动电池出仓,当电池完全被运送上桥后,电池装卸运载桥113的升降电机111继续控制桥体与无人机电池仓保持同一高度,再将电池推入无人机,完成安装电池的操作。
45.优选地,本实施例中,所述装卸机载设备组件15包括三角架151、轴承支架152、滑槽153、滚轮154、水平驱动电机155、减速机156、水平驱动齿轮157、齿条158、机载设备驱动连接组件、滑轨1511、机载设备托架1512和机载设备滑槽1513,所述三角架151的底部相对两侧均设有多个所述轴承支架152,所述轴承支架152固定在所述底板3上,所述轴承支架152上转动设置有所述滚轮154,所述三角架151相对侧壁上均设有所述滑槽153,所述滚轮154滑动设置在所述滑槽153内,所述三角架151上设有所述水平驱动电机155和所述减速机156,所述水平驱动电机155的输出端连接所述减速机156,所述减速机156的输出端连接所述水平驱动齿轮157,所述水平驱动齿轮157啮合连接有所述齿条158,所述齿条158固定在所述底板3上,所述三角架151的顶部设有所述机载设备托架1512,所述机载设备托架1512的一端上设有供所述无人机18上的旋转支架19通过的所述机载设备滑槽1513,所述三角架151上设有用于卡接所述旋转支架19后,驱动所述旋转支架19滑动到所述的机载设备滑槽1513内的所述机载设备驱动连接组件,所述机载设备驱动连接组件包括机载设备驱动电机、推杆159和挂钩1510,所述机载设备驱动电机安装在所述三角架151上,所述机载设备驱动电机的输出端螺纹连接有所述推杆159,所述推杆159上固定设有用于卡接所述旋转支架19的挂钩1510,所述三角架151的顶部设有用于机载设备导向的滑轨1511,所述滑轨1511与所述机载设备滑槽1513处在同一条直线上。
46.机载设备会随无人机18执行不同任务而更换,为此,无人机站设计了装卸机载设备组件15,该设备具体涉及无人机站部分和无人机挂载部分。
47.无人机站部分:如图7所示,为每个机载设备提供三角架151,该支架采用22度角的坡面结构,坡面上放置机载设备,坡面下方设有机载设备驱动电机控制推杆伸缩,就如同丝杆传动一样,带动挂钩1510来回移动,从而勾住旋转支架19,使其上的机载设置安置在机载设备托架1512上;
48.无人机挂载部分:如图8所示,旋转支架19包括下支撑板191、上支撑架192、锁紧件193、旋转电机194和卡孔195,上支撑架192与下支撑板191转动连接,旋转电机194安装在上支撑架192的一侧,用于控制转动角度,锁紧件193包括锁紧驱动电机、驱动齿轮和锁塔,锁紧驱动电机驱动驱动齿轮,锁塔外设有齿环,驱动齿轮与齿环啮合,装卸机载设备组件15的机载设备托架1512上设有与锁塔锁紧配合的机载设备锁扣1514。
49.在本实用新型的描述中,需要理解的是,术语“中心”、“长度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“内”、“外”、“周侧”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的系统或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
50.在本实用新型的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
51.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
52.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
53.以上仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。