1.本发明涉及无人飞行器技术领域,该无人飞行器用于农业播种、施肥等,具体涉及一种便携式无人飞行器及其使用方法。
背景技术:
2.众所周知,无人飞行器作为新型行业,近些年在民用、农业用等技术领域中应用相对较为广泛。无人飞行器爱好者常常利用无人飞行器进行高空拍摄,获取所需要的视频或者照片;农业上,常常利用无人飞行器进行播种、洒肥等,有些消防及快递行业,还将无人飞行器进行救火、山区快递配送等等。
3.随着无人飞行器行业的研究不断深入,申请人对无人飞行器也有研究爱好,尤其是在当前农业大规模生产、播种、收割等政策鼓励与支持的背景下,为了提高播种、施肥的作业效率,利用无人飞行器进行作业渐渐被农民所接受。的但是,申请人发现,农民控制单个无人飞行器时,易于控制,但是单个无人飞行器往往在播种一段时间(例如30分钟)后,需要进行充电或者更换电源,这样会大大降低了作业效率;对于多个无人飞行器的同步操作使用,研究尚少。此外,对于无人飞行器而言,折叠臂组件以及播种盒的设计作为主要部件,折叠臂的折叠展开效率以及播种盒的设计往往存在结构单一、折叠效果不理想、无法对播种的种子数量进行统计等等,给农民在作业完成后,会产生一定的困扰。本发明正是基于上述研究背景下而提出,旨在提供一种便携式无人飞行器及其使用方法以满足使用需要。
技术实现要素:
4.针对无人飞行器存在的上述缺陷,本发明的目的在于:提供一种便携式无人飞行器及其使用方法,其具有结构设计合理、操作使用方便、能够便于对播种盒内的播种物进行数量统计、以及通过对播种物数量多少能够便于提醒操作人员及时补充,此外,折叠臂组件的结构设计能够使得折叠臂的折叠展开效率大大提高,并能可靠的将播种盒吊放,满足使用需要。
5.为了达到上述目的,本发明采用如下技术方案:一种便携式无人飞行器,该便携式无人飞行器用于农业播种,在农业播种时,便携式无人飞行器的数量为若干个排成一列或者排成一行,每个便携式无人飞行器沿预设的播种路线同步飞行,并均包括飞行器壳体、设置于飞行器壳体内的控制组件、活动设置于壳体上的折叠臂组件、活动设置于折叠臂组件上的播种盒;所述播种盒通过连接线缆设置于折叠臂组件上,该播种盒包括中空方形壳体、所述中空方形壳体的顶部设置有连接线缆连接部和待播种物投料口,所述中空方形壳体的底部设置有待播种物卸料口;所述待播种物卸料口处设置有开口启闭板;所述控制组件与播种盒的开口启闭板控制连接。
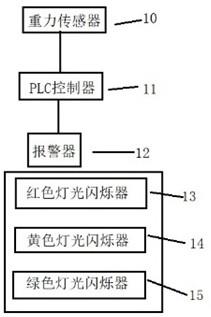
6.作为上述方案的进一步优化,所述中空方形壳体的底部还设置有重力传感器,所述控制组件包括plc控制器、报警器;所述重力传感器实时检测中空方形壳体底部上的待播种物重量,并将检测的信号发送至plc控制器,报警器包括红色灯光闪烁器、黄色灯光闪烁
器和绿色灯光闪烁器;当重力传感器实时检测的待播种物重量为第一预设重力阈值于第二预设重力阈值之间时,plc控制器控制绿色灯光闪烁器进行闪烁;当重力传感器实时检测的待播种物重量为第二预设重力阈值于第三预设重力阈值之间时,plc控制器控制黄色灯光闪烁器进行闪烁;当重力传感器实时检测的待播种物重量低于第三预设重力阈值之间时,plc控制器控制红色灯光闪烁器进行闪烁;其中第一预设重力阈值为满装状态下的待播种物的重力;第二预设重力阈值为一半状态下的待播种物的重力;第三预设重力阈值为第一预设重力阈值的5%-15%。
7.作为上述方案的进一步优化,所述飞行器壳体上设置有两个安装槽;每个安装槽内对应设置有一个折叠臂组件,该安装臂组件均活动连接于该安装槽内;该折叠臂组件包括:第一折叠臂、第二折叠臂和枢接部;所述枢接部包括第一枢接部和第二枢接部;所述第一枢接部包括第一轴套和连接第一折叠臂的第一安装部,第一轴套的一端设置有“∨”型切口部,另一端为开口部;第二枢接部包括第二轴套和连接第二折叠臂的第二安装部;所述第二轴套的一端设置有与v型切口部形状相配合的“∧”型凸起部,另一端为封闭端,该封闭端设置有“十”字形安装槽,该“十”字形安装槽上设置有枢轴杆,该枢轴杆的一端设置有与“十”字形安装槽相配合的“十”字形凸起,另一端设置有螺纹端;带有螺纹端的所述枢轴杆穿过所述第一轴套,并且螺纹端突出于所述开口部,在所述螺纹端上设置有锁定螺母;通过旋转第一枢接部和第二枢接部,将“∨”型切口部与“∧”型凸起部发生相对位置变化,使得第一折叠臂与第二折叠臂平行且不位于同一直线上。
8.作为上述方案的进一步优化,所述“∨”型切口部的深度为第一轴套高度值的10%-15%;所述“∧”型凸起部与所述“∨”型切口部的连接处设置有滚珠和导引槽;所述滚珠设置于所述“∧”型凸起部与所述“∨”型切口部的任一方上,所述导引槽设置于所述“∧”型凸起部与所述“∨”型切口部的另一方上;所述滚珠为碳化钨钢珠,数量为1-3个。
9.作为上述方案的进一步优化,第一轴套上靠近“∨”型切口部的顶面处设置有限位槽;所述限位槽的形状与所述“∧”型凸起部的顶部形状相适配,用于当折叠臂组件处于打开状态时,利用所述“∧”型凸起部与所述限位槽相互配合,将第二轴套固定在当前状态;所述第一轴套上与“∨”型切口部的顶面相连接处设置有圆弧形过渡。
10.作为上述方案的进一步优化,当待播种物为大豆、小麦或玉米的种子时,所述中空方形壳体的底部还设置有光学计数器,所述控制组件还包括与plc控制器相连接的计时器;所述光学计数器与plc控制器数据信号连接,用于实时检测大豆、小麦或玉米种子的播种数量信号,并将播种数量信号发送至plc控制器;所述光学计数器包括激光源、光学传感器和计数器,激光源与光学传感器分别位于待播种物卸料口两侧,并且位置相互对应,当有大豆、小麦或玉米种子从待播种物卸料口经过一次时,激光源发射的光被反射,光学传感器检测不到光线时,计数器加一;依次类推,对每个种子从待播种物卸料口流出时均进行数量检测;所述计时器用于对中空方形壳体内的种子全部流出时进行计时,便于操作人员对单位时间内播种数量的统计。
11.作为上述方案的进一步优化,每个折叠臂组件的第一折叠臂和第二折叠臂为碳纤维板体;所述飞行器壳体上还设置有水准仪用于调节每个第一折叠臂和第二折叠臂下方放置待播种物重量,使得第一折叠臂与第二折叠臂在无人飞行器运行时处于水平状态。
12.本发明上述一种便携式无人飞行器的使用方法包括如下步骤:
1)无人飞行器的数量确定:根据农业待播种区域的面积,确定无人飞行器的数量;当数量确定好后,将无人飞行器按列排布或者按行排布;2)待播种物的装载:根据每个无人飞行器各自的待播种路线长度,预先确定待播种物的装载量;3)无人飞行器的展开:将无人飞行器的电源安装到位,并将飞行器壳体上的折叠臂组件展开,使得折叠臂组件的每个折叠臂位于预设的展开位置;4)安装播种盒:利用连接线缆将播种盒安装在每个折叠臂组件的每个折叠臂下方;5)进行播种:启动无人飞行器,利用控制组件控制播种盒的开口启闭板的状态,对待播种路线进行播种,对播种路线上的播种种子数量进行统计,并且当播种盒内种子数量较少时,控制器组件发出提醒信号,以便于操作者及时补充待播种物。
13.采用本发明一种便携式无人飞行器及其使用方法具有如下有益效果:(1)结构设计更加合理,能够对播种盒内的开口启闭板进行控制,不用人工即可方便开启,大大提高了作业效率。
14.(2)对于播种盒内的播种物重量进行检测,能够便于操作者及时了解播种盒内的播种物的数量情况,及时进行补充。
15.(3)折叠臂组件结构的设计,能够确保每个折叠臂能够展开到位,并实现在展开状态下的可靠限位,使得折叠臂能够可靠保持在展开状态下。
16.(4)利用“∧”型凸起部与“∨”型切口部的连接处设置的滚珠和导引槽,能够大大降低折叠别的折叠与展开过程的摩擦力,降低了噪音,提升了使用体验感。
17.(5)利用光学计数器和计时器能够对播种物的数量进行统计,使得操作者能够清楚地了解播种情况。
18.(5)碳纤维板具有较高强度,并且质量较轻,能够满足使用需要。
19.(6)依托于本技术的控制组件,还能够对无人飞行器的功能作以其他功能的拓展,例如利用无线通讯装置能够建立无人飞行器与操作者使用的智能移动终端之间进行无线通信,以便于实时对播种情况进行了解。
附图说明
20.附图1为本发明便携式无人飞行器应用于农业播种时的工作示意图。
21.附图2为本发明便携式无人飞行器的单个结构俯视示意图。
22.附图3为本发明便携式无人飞行器的单个结构主视示意图。
23.附图4为本发明便携式无人飞行器的播种盒的结构示意图。
24.附图5为本发明便携式无人飞行器的控制组件的结构示意图。
25.附图6为本发明便携式无人飞行器的安装壁组件的结构示意图。
26.附图7为本发明便携式无人飞行器的枢转部结构示意图。
具体实施方式
27.下面结合附图1-7对本发明一种便携式无人飞行器及其使用方法作以详细说明。
28.一种便携式无人飞行器,该便携式无人飞行器用于农业播种,在农业播种时,便携
式无人飞行器1的数量为若干个排成一列或者排成一行,每个便携式无人飞行器沿预设的播种路线同步飞行,并均包括飞行器壳体2、设置于飞行器壳体内的控制组件、活动设置于壳体上的折叠臂组件3、活动设置于折叠臂组件上的播种盒4;所述播种盒通过连接线缆5设置于折叠臂组件上,该播种盒包括中空方形壳体、所述中空方形壳体的顶部设置有连接线缆连接部6和待播种物投料口7,所述中空方形壳体的底部设置有待播种物卸料口8;所述待播种物卸料口处设置有开口启闭板9;所述控制组件与播种盒的开口启闭板控制连接。
29.所述中空方形壳体的底部还设置有重力传感器10,所述控制组件包括plc控制器11、报警器12;所述重力传感器实时检测中空方形壳体底部上的待播种物重量,并将检测的信号发送至plc控制器,报警器包括红色灯光闪烁器13、黄色灯光闪烁器14和绿色灯光闪烁器15;当重力传感器实时检测的待播种物重量为第一预设重力阈值于第二预设重力阈值之间时,plc控制器控制绿色灯光闪烁器进行闪烁;当重力传感器实时检测的待播种物重量为第二预设重力阈值于第三预设重力阈值之间时,plc控制器控制黄色灯光闪烁器进行闪烁;当重力传感器实时检测的待播种物重量低于第三预设重力阈值之间时,plc控制器控制红色灯光闪烁器进行闪烁;其中第一预设重力阈值为满装状态下的待播种物的重力;第二预设重力阈值为一半状态下的待播种物的重力;第三预设重力阈值为第一预设重力阈值的5%-15%。
30.所述飞行器壳体上设置有两个安装槽16;每个安装槽内对应设置有一个折叠臂组件,该安装臂组件均活动连接于该安装槽内;该折叠臂组件包括:第一折叠臂17、第二折叠臂18和枢接部;所述枢接部包括第一枢接部19和第二枢接部20;所述第一枢接部包括第一轴套21和连接第一折叠臂的第一安装部22,第一轴套的一端设置有“∨”型切口部23,另一端为开口部;第二枢接部包括第二轴套24和连接第二折叠臂的第二安装部25;所述第二轴套的一端设置有与v型切口部形状相配合的“∧”型凸起部26,另一端为封闭端,该封闭端设置有“十”字形安装槽,该“十”字形安装槽上设置有枢轴杆27,该枢轴杆的一端设置有与“十”字形安装槽相配合的“十”字形凸起,另一端设置有螺纹端;带有螺纹端的所述枢轴杆穿过所述第一轴套,并且螺纹端突出于所述开口部,在所述螺纹端上设置有锁定螺母;通过旋转第一枢接部和第二枢接部,将“∨”型切口部与“∧”型凸起部发生相对位置变化,使得第一折叠臂与第二折叠臂平行且不位于同一直线上。
31.所述“∨”型切口部的深度为第一轴套高度值的10%-15%;所述“∧”型凸起部与所述“∨”型切口部的连接处设置有滚珠和导引槽;所述滚珠设置于所述“∧”型凸起部与所述“∨”型切口部的任一方上,所述导引槽设置于所述“∧”型凸起部与所述“∨”型切口部的另一方上;所述滚珠为碳化钨钢珠,数量为1-3个。
32.第一轴套上靠近“∨”型切口部的顶面处设置有限位槽;所述限位槽的形状与所述“∧”型凸起部的顶部形状相适配,用于当折叠臂组件处于打开状态时,利用所述“∧”型凸起部与所述限位槽相互配合,将第二轴套固定在当前状态;所述第一轴套上与“∨”型切口部的顶面相连接处设置有圆弧形过渡。
33.当待播种物为大豆、小麦或玉米的种子时,所述中空方形壳体的底部还设置有光学计数器28,所述控制组件还包括与plc控制器相连接的计时器29;所述光学计数器与plc控制器数据信号连接,用于实时检测大豆、小麦或玉米种子的播种数量信号,并将播种数量信号发送至plc控制器;所述光学计数器包括激光源、光学传感器和计数器,激光源与光学
传感器分别位于待播种物卸料口两侧,并且位置相互对应,当有大豆、小麦或玉米种子从待播种物卸料口经过一次时,激光源发射的光被反射,光学传感器检测不到光线时,计数器加一;依次类推,对每个种子从待播种物卸料口流出时均进行数量检测;所述计时器用于对中空方形壳体内的种子全部流出时进行计时,便于操作人员对单位时间内播种数量的统计。
34.每个折叠臂组件的第一折叠臂和第二折叠臂为碳纤维板体;所述飞行器壳体上还设置有水准仪用于调节每个第一折叠臂和第二折叠臂下方放置待播种物重量,使得第一折叠臂与第二折叠臂在无人飞行器运行时处于水平状态。
35.本发明上述一种便携式无人飞行器的使用方法包括如下步骤:1)无人飞行器的数量确定:根据农业待播种区域的面积,确定无人飞行器的数量;当数量确定好后,将无人飞行器按列排布或者按行排布;2)待播种物的装载:根据每个无人飞行器各自的待播种路线长度,预先确定待播种物的装载量;3)无人飞行器的展开:将无人飞行器的电源安装到位,并将飞行器壳体上的折叠臂组件展开,使得折叠臂组件的每个折叠臂位于预设的展开位置;4)安装播种盒:利用连接线缆将播种盒安装在每个折叠臂组件的每个折叠臂下方;5)进行播种:启动无人飞行器,利用控制组件控制播种盒的开口启闭板的状态,对待播种路线进行播种,对播种路线上的播种种子数量进行统计,并且当播种盒内种子数量较少时,控制器组件发出提醒信号,以便于操作者及时补充待播种物。
36.本技术采用的控制组件中各个电器元件(包括plc控制器、重量传感器、光学计数器、计时器等),对于单个电器元件而言,均属于本领域常见的类型,但是通过将其按照本发明上述技术方案的组合,能够满足本技术提及的上述技术效果。另外,折叠臂组件中折叠臂的长度、播种盒的尺寸设计,均可以根据实际设计及使用需要进行合理选择,在此不再赘述。此外,本发明的开口启闭板可采用电磁驱动的挡板(通过电磁铁在通电或断电情况下驱动带动挡板水平运动)、或者微型电机驱动的挡板(通过微型电机的输出轴上设置减速齿轮、传动齿轮将电机的输出力驱动挡板的转轴发生转动),具体挡板的运动方式可采用滑动启闭,或者转动启闭,两种启闭方式均可。
37.上述的对实施例的描述是为便于该技术领域的普通技术人员能理解和应用本发明。熟悉本领域技术的人员显然可以容易地对这些实施例做出各种修改,并把在此说明的一般原理应用到其他实施例中而不必经过创造性的劳动。因此,本发明不限于这里的实施例,本领域技术人员根据本发明的揭示,不脱离本发明范畴所做出的改进和修改都应该在本发明的保护范围之内。