1.本发明涉及微型飞行器领域,具体来说是一种基于翼根弹性储能实现拍动幅度可控的仿生扑翼微型飞行器。
背景技术:
2.微小型飞行器的概念于上世纪九十年代被美国国防部高级研究计划局提出,随着mems加工和计算机等技术的快速发展,微型飞行器概念逐渐变为现实。微型飞行器在侦察监视、灾后搜救和管道巡视等军用、民用领域有着广阔的应用前景。自然界中昆虫的尺寸与微小型飞行器尺寸相当,并且具有极强的机动性和气动效率。因此,基于昆虫的飞行原理,科学家提出了仿生扑翼微型飞行器的概念。仿生扑翼微型飞行器的扑翼运动类似昆虫翅的翼拍动,在小尺寸、低速飞行条件下能够产生较高的升力,同时,这一布局相较于固定翼和旋翼微型飞行器具有仿生隐蔽性的优点,仿生扑翼微型飞行器也成为目前微型飞行器的设计热点。
3.目前的仿生扑翼微型飞行器发展仍面临诸多难点。一方面,由于人造结构难以达到生物肌肉的灵活性,如何实现昆虫翅膀的复杂拍动运动,以产生可控飞行需要的控制力矩成为难题。昆虫通常通过两种方式产生控制力矩,一种是主动控制翅膀在一个拍动周期内的攻角变化,改变左、右翼不同拍动阶段的气动力,从而产生控制力矩;另一种是主动控制翅膀拍动运动,包括拍动幅度或拍动平面的变化,改变左、右翼的气动力大小或方向,从而产生控制力矩。目前公开的仿生扑翼微型飞行器中,多采用攻角控制的方案,控制拍动运动的方案较为少见。攻角控制方案机构较为简单,但其在一个拍动周期内改变扑翼的攻角,使得其无法一直保持最佳效率攻角拍动,因此在控制的过程中会影响扑翼的气动效率,从而影响续航时间;除此之外,由于翼膜多采用柔性材料,对翼膜的攻角控制难以实现精准控制,也对控制系统提出了更高的要求。而控制拍动运动的方案,可以通过改变左右翼的拍动幅度和拍动平均位置来实现控制力矩的产生,并保证扑翼的攻角一直维持在高效率攻角不变,但由于仿生扑翼微型飞行器的传动结构通常处于高速转动状态,因此往往难以对传动结构进行控制,以改变拍动运动。
4.另一方面,目前公开的大多数仿生扑翼微型飞行器,大多使用连杆结构实现仿生拍动运动,飞行器的扑翼在上下拍动过程中运动到机构设计的极限拍动位置时,由于翼杆和扑翼的惯性载荷带动,往往会带着扑翼继续运动,使得传动连杆结构进入传动受力不好的状态或死点位置,造成传动效率下降,影响飞行器续航时间。同时,这部分惯性载荷往往通过结构变形、铆钉碰撞和电机堵转等形式被耗散掉,往往会引发拍动运动变形、电机效率下降等多方面问题,进一步造成飞行器升力下降、续航时间减少等问题。
5.因此,有必要发明一些可解决扑翼在拍动极限位置的惯性载荷存储应用的仿生扑翼微型飞行器,并基于此方案实现拍动运动幅度可调节,并进一步发展其飞行控制方法。
技术实现要素:
6.本发明提出了一种基于翼根弹性储能实现拍动幅度可控的仿生扑翼微型飞行器。该飞行器可在翼接近上下拍极限位置时将扑翼惯性功转换为弹性势能,并在随后的拍动开始阶段释放,这不仅减小传动机构的能量耗散,同时减少扑翼翻转时间,增加扑翼气动效率。此外,飞行器可通过三个舵机调节左右扑翼拍动幅度和拍动角平均位置,在维持控制过程中扑翼始终处于较高气动效率点的前提下,实现飞行器的三轴控制。
7.一种基于翼根弹性储能实现拍动幅度可控的仿生扑翼微型飞行器包括传动系统、控制系统、升力系统和动力系统。
8.所述传动系统包括传动底座、支撑底座、分布齿轮减速组、连杆、传动放大装置。传动底座用于固定分布齿轮减速组和动力装置,支撑底座用于固定传动放大装置、控制系统的控制执行机构和约束控制系统张紧绳的位置。分布齿轮减速组包括主轴齿轮和减速组齿轮,主轴齿轮安装于动力装置的输出轴上,减速组齿轮由多个齿轮组成,与主轴齿轮啮合,并将动力装置的高速运动减速。连杆的一端连接在末端减速组齿轮的偏心孔位上,另一端通过铆钉与传动放大装置同轴连接,并在支撑底座约束滑槽内顺畅滑动,形成曲柄滑块机构,将分布式齿轮减速组减速后的圆周运动变为连杆的水平面内直线往复滑动。传动放大装置为杆系结构,各组成杆件通过铆钉固定于支撑底座的安装孔位上,将连杆的水平面内直线往复滑动变为翼的往复拍动,同时将翼的往复拍动幅度进行放大,提高气动力的产生。
9.所述控制系统包括弹性止挡机构和控制执行机构。弹性止挡机构由左、右弹性止挡机构组成,分别用于约束左、右扑翼极限位置,左、右弹性止挡机构组成相同,均分别由支撑圆柱、翼杆止挡件、弹簧连接件和弹簧组成。支撑圆柱通过铆钉固连于支撑底座的对应孔位中,支撑圆柱侧面分布有圆环凹槽,用于约束翼杆止挡件、弹簧连接件、弹簧和控制执行机构的张紧绳。翼杆止挡件的外侧有一平板结构,用于约束扑翼拍动极限位置,翼杆止挡件的内侧与弹簧连接,弹簧的另一端与弹簧连接件连接,弹簧连接件同时与控制执行机构的张紧绳连接,翼杆止挡件和弹簧连接件可绕支撑圆柱的圆环凹槽进行圆周滑动。当扑翼接近上下拍极限位置时,翼杆止挡件沿圆环凹槽滑动,弹簧连接件受张紧绳约束位置保持不变,此时弹簧被压缩,实现弹性储能功能,当扑翼的惯性力和动能完全转换为弹簧的弹性势能时,扑翼达到拍动极限位置。
10.控制执行机构包括控制支撑底座、旋转舵机、滑轮、凸轮和张紧绳。控制支撑底座主体为平板结构,用于安装旋转舵机,控制支撑底座通过两端凸柱上的定位孔与支撑底座两端的孔进行铆接固连。旋转舵机包含左旋转舵机、右旋转舵机和中间旋转舵机。左、右旋转舵机的输出端与滑轮同轴连接,可带动滑轮正转或反转,中间旋转舵机的输出端与凸轮同轴连接,可带动凸轮正转或反转,滑轮和凸轮侧缘有一圆环型凹槽,分别用于约束张紧绳。
11.所述升力系统包括左、右两个扑翼,每个扑翼由主梁、柔性梁、竖梁和翼膜组成。所述翼膜为柔性膜,采用聚亚酰胺材料,翼膜的前缘和侧缘分别裹成管状后用粘结剂固定。所述主梁和竖梁分别穿过翼膜前缘和侧缘所形成的管状空间,并可绕管状空间自由转动。竖梁呈90
°
搭于主梁下方,柔性梁粘接在翼膜一侧,与主梁呈30
°
夹角;主梁翼根端与传动系统的翼杆连接。
12.所述动力系统为仿生扑翼飞行器的动力源,驱动系统机构实现扑翼的拍动运动。
动力系统由动力装置组成,其中动力装置可为空心杯电机或无刷电机。
13.一种基于翼根弹性储能实现拍动幅度可控的仿生扑翼微型飞行器其翼根储能和释放的过程如下:
14.(1)当扑翼接近上拍或下拍极限位置,扑翼受惯性载荷作用即将超出设计拍动幅度范围时,带动扑翼转动的连杆接触翼杆止挡件,带动翼杆止挡件沿着支撑圆柱的圆环凹槽旋转,翼杆止挡件进而带动弹簧开始压缩;
15.(2)弹簧的另一端与弹簧连接件连接,在控制执行机构保持不动时,弹簧连接件受到张紧绳的约束,保持位置不动,该过程弹簧压缩,将翼杆止挡件传递过来的动能转换为弹性势能,并通过翼杆止挡件对带动扑翼转动的连杆施加与扑翼运动方向相反的阻力,使当前拍动过程更快结束;
16.(3)随着扑翼的上拍或下拍过程结束,扑翼动能转换为弹簧的弹性势能,之后弹簧逐渐释放弹性势能,弹簧通过翼杆止挡件对带动扑翼转动的连杆施加力的作用,加速扑翼随后的下拍或上拍的过程,直到弹簧弹性势能完全释放,翼杆止挡件恢复到初始止挡位置。
17.上述过程中,一方面,由于弹簧加速了扑翼的上拍或下拍的结束过程和下拍或上拍的开始过程,减少了扑翼的翻转时间,从而提高了扑翼的气动效率;另一方面,弹簧将扑翼的惯性功转为弹性势能后又释放施加于扑翼上,将扑翼的惯性功有效利用,减小了传动机构的能量损耗,同时通过选用不同刚度的弹簧可以确保扑翼的最大拍动幅度,实现弹性限位功能。
18.一种基于翼根弹性储能实现拍动幅度可控的仿生扑翼微型飞行器俯仰控制力矩的产生过程如下:飞行器需要产生俯仰控制力矩时,左、右旋转舵机反向旋转,分别通过滑轮带动控制执行系统的张紧绳反向转动,驱使左侧限制上拍的弹簧连接件和翼杆止挡件顺时针转动(或逆时针转动),左侧限制下拍的弹簧连接件和翼杆止挡件顺时针转动(或逆时针转动),右侧限制上拍的弹簧连接件和翼杆止挡件逆时针转动(或顺时针转动),右侧限制下拍的弹簧连接件和翼杆止挡件逆时针转动(或顺时针转动),从而左侧扑翼上拍极限位置和下拍极限位置同时顺时针旋转(或逆时针旋转),右侧扑翼上拍极限位置和下拍极限位置同时逆时针旋转(或顺时针旋转)。该过程中,中间旋转舵机保持不动,左、右扑翼的拍动幅度不变,拍动角平均位置同时前移或后移,在拍动运动产生的气动力大小近似不变的情况下,实现气动力的作用点同时前移(或后移),相较于舵机转动前产生抬头力矩(或低头力矩)。
19.一种基于翼根弹性储能实现拍动幅度可控的仿生扑翼微型飞行器滚转控制力矩的产生过程如下:飞行器需要产生滚转控制力矩时,左、右旋转舵机同向旋转,分别通过滑轮带动控制执行系统的张紧绳同向转动,驱使左侧限制上拍的弹簧连接件和翼杆止挡件顺时针转动(或逆时针转动),左侧限制下拍的弹簧连接件和翼杆止挡件逆时针转动(或顺时针转动),右侧限制上拍的弹簧连接件和翼杆止挡件顺时针转动(或逆时针转动),右侧限制下拍的弹簧连接件和翼杆止挡件逆时针转动(或顺时针转动),从而左侧扑翼和右侧扑翼的上拍极限位置同时顺时针转动(或逆时针旋转),左侧扑翼下拍极限位置和右侧扑翼的下拍极限位置同时逆时针旋转(或顺时针旋转)。该过程中间旋转舵机保持不动,左扑翼拍动幅度增大(或减小),右扑翼拍动幅度减小(或增大),左、右翼杆拍动平均位置不变,因而左扑翼拍动运动产生的气动力增大(或减小),右扑翼拍动运动产生的气动力减小(或增大),相
较于舵机转动前,产生右滚力矩(或左滚力矩)。
20.一种基于翼根弹性储能实现拍动幅度可控的仿生扑翼微型飞行器偏航控制力矩的产生过程如下:
21.飞行器需要产生偏航控制力矩时,左、右旋转舵机保持不动,中间旋转舵机带动凸轮顺时针(或逆时针)旋转,由于凸轮直径变化,导致凸轮两侧的张紧绳一侧拉紧,另一侧变松。驱使左侧限制上拍的弹簧连接件和翼杆止挡件逆时针转动(或顺时针转动),左侧限制下拍的弹簧连接件和翼杆止挡件顺时针转动(或逆时针转动),右侧限制上拍的弹簧连接件和翼杆止挡件顺时针转动(或逆时针转动),右侧限制下拍的弹簧连接件和翼杆止挡件逆时针转动(或顺时针转动),从而左侧扑翼的上拍极限位置和右侧扑翼的下拍极限位置同时逆时针转动(或顺时针旋转),左侧扑翼的下拍极限位置和右侧扑翼的上拍极限位置同时顺时针旋转(或逆时针旋转)。左扑翼和右扑翼拍动幅度不变,而左扑翼和右扑翼的拍动平均位置同时逆时针旋转(或顺时针旋转),由于左、右扑翼的转动点与飞行器重心不重合,因此左、右扑翼的侧向力将产生左偏航力矩(或右偏航)。
22.本发明的优点在于:
23.(1)一种基于翼根弹性储能实现拍动幅度可控的仿生扑翼微型飞行器,通过翼根弹性止挡结构,将翼杆拍动过程中的惯性功储存为弹性势能,并在扑翼下一拍动初始阶段又将弹性势能转换为扑翼运动的动能,提高了飞行器传动效率,减小飞行器的能量耗散,同时可减小飞行器由于惯性载荷过大造成的振动问题。
24.(2)一种基于翼根弹性储能实现拍动幅度可控的仿生扑翼微型飞行器,通过翼根弹性止挡结构,加速扑翼在上拍和下拍运动转换过程中的运动,减少了扑翼的翻转时间,从而提高了扑翼的气动效率。
25.(3)一种基于翼根弹性储能实现拍动幅度可控的仿生扑翼微型飞行器,通过翼根弹性止挡结构,和合理的弹簧选取,可以设计扑翼拍动幅度极限位置,有效避免扑翼进入传动受力状态较差的工作点,保证传动机构处于高效运转工作区,是一种有效的拍动幅度限位器。
26.(4)一种基于翼根弹性储能实现拍动幅度可控的仿生扑翼微型飞行器,通过三个旋转舵机、滑轮和凸轮,可实现在不改变传动机构运转的情况下,对扑翼拍动幅度的差动调节,实现仿生拍动控制运动,实现仿生扑翼微型飞行器三轴可控飞行。
附图说明
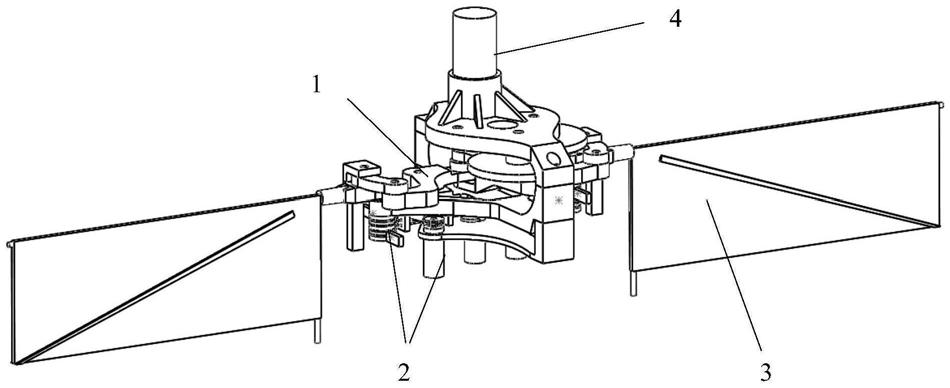
27.图1是本发明一种基于翼根弹性储能实现拍动幅度可控的仿生扑翼微型飞行器的整体示意图;
28.图2是本发明一种基于翼根弹性储能实现拍动幅度可控的仿生扑翼微型飞行器的传动系统部分示意图;
29.图3是本发明一种基于翼根弹性储能实现拍动幅度可控的仿生扑翼微型飞行器的控制系统部分示意图;
30.图4是本发明一种基于翼根弹性储能实现拍动幅度可控的仿生扑翼微型飞行器的控制系统示意图;
31.图5是本发明一种基于翼根弹性储能实现拍动幅度可控的仿生扑翼微型飞行器的
升力系统示意图;
32.图中:
33.1-传动系统
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2-控制系统
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3-升力系统
34.4-动力系统
35.101-传动底座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
102-支撑底座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
103-主轴齿轮
36.104-单层齿轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
105-双层齿轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
106-连杆
37.107-左摇臂
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
108-左连接杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
109-左翼杆
38.110-右摇臂
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
111-右连接杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
112-右翼杆
39.201-支撑圆柱一
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
202-翼杆止挡件一
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
203-弹簧连接件一
40.204-翼杆止挡件二
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
205-弹簧连接件二
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
206-弹簧一
41.207-弹簧二
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
208-控制支撑底座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
209-左旋转舵机
42.210-左滑轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
211-中间旋转舵机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
212-凸轮
43.213-右旋转舵机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
214-右滑轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
215-张紧绳一
44.216-张紧绳二
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
217-支撑圆柱二
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
218-翼杆止挡件三
45.219-弹簧连接件三
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
220-翼杆止挡件四
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
221-弹簧连接件四
46.222-弹簧三
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
223-弹簧四
47.301-主梁
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
302-柔性梁
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
303-竖梁
48.304-翼膜
49.401-动力装置
具体实施方式
50.为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述。需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
51.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。
52.如图1所示,一种基于翼根弹性储能的可控拍动幅度仿生扑翼微型飞行器包括传动系统1、控制系统2、升力系统3和动力系统4。
53.图2示出了传动系统1一示例性实施方式,所述传动系统1包括传动底座101、支撑底座102、分布齿轮减速组、连杆106、传动放大装置。传动底座101包括分布齿轮减速组的安装孔位和动力装置401的安装腔体,用于固定分布齿轮减速组和动力装置401。支撑底座102包含有传动放大装置安装孔位、约束滑槽、控制执行机构安装孔位和四个肋片,分别用于固定传动系统的固定传动放大装置以及控制系统的控制执行机构和约束控制系统的张紧绳。分布齿轮减速组包括主轴齿轮103、单层齿轮104和双层齿轮105。主轴齿轮103安装于动力装置401的输出轴上,单层齿轮104和双层齿轮105分别安装于传动底座101的预定孔位中,双层齿轮105中大齿数齿轮与主轴齿轮103啮合,小齿数齿轮与单层齿轮104啮合。连杆106的一端连接在单层齿轮104的偏心孔位上,另一端通过铆钉与传动放大装置的左摇臂107、右摇臂110一端同轴连接,并在支撑底座102约束滑槽内顺畅滑动。传动放大装置包括左摇
臂107、左连接杆108、左翼杆109、右摇臂110、右连接杆111及右翼杆112,其中左摇臂107和右摇臂110分别通过中间安装孔与支撑底座102对应安装孔位铆接,并可绕中间安装孔位转动。左摇臂107的左端与左连接杆108的右端通过铆钉连接,左连接杆1018的左端与左翼杆109中间的孔位通过铆钉连接,左翼杆109的右端与支撑底座102对应安装孔位铆接,左翼杆109在左连接杆108的带动下绕该安装孔往复拍动。右摇臂110的右端与右连接杆111的左端通过铆钉连接,右连接杆111的右端与右翼杆112中间的孔位通过铆钉连接,右翼杆112的左端与支撑底座102对应安装孔位铆接,右翼杆112绕该安装孔往复拍动。传动放大装置一方面将连杆的水平面内直线往复滑动变为翼的往复拍动,另一方面在有限空间内将往复拍动幅度进行放大,提高气动力的产生。
54.图3和图4示出了控制系统2的一示例性实施方式,所述控制系统包括左弹性止挡机构、控制执行机构和右弹性止挡机构。
55.左弹性止挡机构由支撑圆柱一201、翼杆止挡件一202、弹簧连接件一203、翼杆止挡件二204、弹簧连接件二205和两根弹簧组成。支撑圆柱一201用于约束翼杆止挡件、弹簧连接件、弹簧和控制执行机构的张紧绳,支撑圆柱一201通过铆钉固连于支撑底座102的对应孔位中,支撑圆柱一201侧面从高到低依次分布有四个圆环凹槽,分别为第一圆环凹槽、第二圆环凹槽、第三圆环凹槽和第四圆环凹槽。翼杆止挡件一202和翼杆止挡件二204结构一致,内侧为一段圆心角30
°
的弧型结构,弧形结构可插入支撑圆柱的圆环凹槽中,并可绕支撑圆柱的圆环凹槽进行圆周滑动,其中翼杆止挡件一202插入支撑圆柱一201的第一圆环凹槽中,翼杆止挡件二204插入支撑圆柱一201的第四圆环凹槽中,翼杆止挡件一202和翼杆止挡件二204的圆弧结构侧缘是一个半圆环结构,分别用于与弹簧一206和弹簧二207一端连接,翼杆止挡件一202和翼杆止挡件二204外侧是一长方形平板结构,用于止挡翼杆下端的凸柱。弹簧连接件一203和弹簧连接件二205结构一致,弹簧连接件内侧分为上下两层,皆为一段圆心角30
°
的弧形结构,其中上层弧形结构的高度比下层弧形结构的高度略高,弹簧连接件一203的上层弧形结构插入支撑圆柱一201的第一圆环凹槽中,弹簧连接件一203的下层弧形结构插入支撑圆柱一201的第二圆环凹槽中,弹簧连接件二205的下层弧形结构插入支撑圆柱一201的第三圆环凹槽中,弹簧连接件二205的上层弧形结构插入支撑圆柱一201的第四圆环凹槽中,弹簧连接件一203和弹簧连接件二205可绕支撑圆柱一201的圆环凹槽进行圆周滑动,弹簧连接件的上下圆弧侧缘分别有一个半圆环结构,其中,上端圆弧侧缘的半圆环结构用于与弹簧的另一端连接,下端圆弧侧缘的半圆环结构用于与控制执行机构的张紧绳的一端连接,弹簧连接件的上、下两层圆弧通过反“c”型圆柱结构连接。弹簧一206的两端分别与翼杆止挡件一202侧缘的半圆环结构和弹簧连接件一203的上层弧形结构侧缘的半圆环结构连接,并放置于支撑圆柱一201的第一圆环凹槽中,弹簧二207的两端分别与翼杆止挡件二204侧缘的半圆环结构和弹簧连接件二205的上层弧形结构侧缘的半圆环结构连接,并放置于支撑圆柱一201的第四圆环凹槽中。
56.控制执行机构包括控制支撑底座208、左旋转舵机209、左滑轮210、中间旋转舵机211、凸轮212、右旋转舵机213、右滑轮214、张紧绳一215和张紧绳二216。控制支撑底座208主体为平板结构,平板上留有三个旋转舵机安装孔位,分别用于安装左旋转舵机209、中间旋转舵机211和右旋转舵机213,控制支撑底座208两端为凸柱结构,凸柱结构上各有一个定位孔,控制支撑底座208通过两端凸柱上的定位孔与支撑底座102两端的孔进行铆接固连,
左旋转舵机209安装于控制支撑底座208的预留安装孔位中,其输出端与左滑轮210同轴连接,可带动左滑轮210正转或反转,左滑轮210为一圆柱结构,侧缘有一圆环型凹槽,用于约束张紧绳一216,中间旋转舵机211固定于控制支撑底座208的预留安装孔位中,其输出端与凸轮212同轴连接,可带动凸轮212正转或反转,凸轮212为侧缘有一圆环型凹槽,用于约束张紧绳一215和张紧绳二216,右旋转舵机213安装于控制支撑底座208的预留安装孔位中,其输出端与右滑轮214同轴连接,可带动右滑轮214正转或反转,右滑轮214为一圆柱结构,侧缘有一圆环型凹槽,用于约束张紧绳二216。
57.右弹性止挡机构由支撑圆柱二217、翼杆止挡件三218、弹簧连接件三219、翼杆止挡件四220、弹簧连接件四221和两根弹簧组成。支撑圆柱二217用于约束翼杆止挡件、弹簧连接件、弹簧和控制执行机构的张紧绳,支撑圆柱二217通过铆钉固连于支撑底座102的对应孔位中,支撑圆柱二217侧面从高到低依次分布有四个圆环凹槽,分别为第一圆环凹槽、第二圆环凹槽、第三圆环凹槽和第四圆环凹槽。翼杆止挡件三218和翼杆止挡件四220结构一致,内侧为一段圆心角30
°
的弧型结构,弧形结构可插入支撑圆柱的圆环凹槽中,并可绕支撑圆柱的圆环凹槽进行圆周滑动,其中翼杆止挡件三218插入支撑圆柱二217的第一圆环凹槽中,翼杆止挡件四220插入支撑圆柱二217的第四圆环凹槽中,翼杆止挡件三218和翼杆止挡件四220的圆弧结构侧缘是一个半圆环结构,分别用于与弹簧三222和弹簧四223一端连接,翼杆止挡件三218和翼杆止挡件四220外侧是一长方形平板结构,用于止挡翼杆下端的凸柱。弹簧连接件三219和弹簧连接件四221结构一致,弹簧连接件内侧分为上下两层,皆为一段圆心角30
°
的弧形结构,其中上层弧形结构的高度比下层弧形结构的高度略高,弹簧连接件三219的上层弧形结构插入支撑圆柱二217的第一圆环凹槽中,弹簧连接件三219的下层弧形结构插入支撑圆柱二217的第二圆环凹槽中,弹簧连接件四221的下层弧形结构插入支撑圆柱二217的第三圆环凹槽中,弹簧连接件四221的上层弧形结构插入支撑圆柱二217的第四圆环凹槽中,弹簧连接件三219和弹簧连接件四221可绕支撑圆柱二217的圆环凹槽进行圆周滑动,弹簧连接件的上下圆弧侧缘分别有一个半圆环结构,其中,上端圆弧侧缘的半圆环结构用于与弹簧的另一端连接,下端圆弧侧缘的半圆环结构用于与控制执行机构的张紧绳的一端连接,弹簧连接件的上、下两层圆弧通过反“c”型圆柱结构连接。弹簧三222的两端分别与翼杆止挡件三218侧缘的半圆环结构和弹簧连接件三219的上层弧形结构侧缘的半圆环结构连接,并放置于支撑圆柱二217的第一圆环凹槽中,弹簧四223的两端分别与翼杆止挡件四220侧缘的半圆环结构和弹簧连接件四221的上层弧形结构侧缘的半圆环结构连接,并放置于支撑圆柱二217的第四圆环凹槽中。
58.图5示出了升力系统3的一示例性实施方式。所述升力系统3由左、右两个扑翼组成,每个扑翼由主梁301、柔性梁302、竖梁303和翼膜304组成。所述翼膜304为柔性膜,采用聚亚酰胺材料,翼膜304的前缘和侧缘分别裹成管状后用粘结剂固定。所述主梁301和竖梁303分别穿过翼膜304前缘和侧缘所形成的管状空间,并可绕管状空间自由转动。竖梁303呈90
°
搭于主梁301下方,柔性梁302粘接在翼膜一侧,与主梁301呈30
°
夹角;主梁301翼根端与传动系统的翼杆连接。
59.所述动力系统为仿生扑翼飞行器的动力源,驱动系统机构实现扑翼的拍动运动。动力系统由动力装置401组成,其中动力装置401可为空心杯电机或无刷电机。
60.结合图1-图5说明本发明的一种基于翼根弹性储能的可控拍动幅度仿生扑翼微型
飞行器其翼根储能和释放的过程如下:
61.以左翼杆的“上拍结束-下拍开始”过程为例,当左翼杆109在惯性载荷的带动下即将超出设计拍动幅度范围时,左翼杆109下端凸柱与翼杆止挡件一202的外端平板接触,从而带动翼杆止挡件一202沿着支撑圆柱一201的第一圆环凹槽顺时针旋转,进一步翼杆止挡件一202带动弹簧一206开始压缩,由于弹簧一206的另一端与弹簧连接件一203连接,在控制执行机构保持不动时,弹簧连接件一203位置保持不动。因此,弹簧一206将翼杆止挡件一202传递过来的动能转换为弹性势能,并通过翼杆止挡件一202对左翼杆109施加与左翼杆运动方向相反的阻力,加快上拍结束过程;当左翼杆109的动能全部转换为弹簧一206的弹性势能后,左翼杆109上拍过程结束,弹簧一206释放弹性势能,通过翼杆止挡件一202对左翼杆109施加的弹力,在原有传动机构驱动力的基础上加速左翼杆109下拍开始,直到弹簧一206的弹性势能完全释放,翼杆止挡件一202恢复到初始止挡位置。上述过程中,一方面,弹簧一206加速了左翼杆109的上拍结束过程和下拍开始过程,因此减少了扑翼的翻转时间,从而提高了扑翼的气动效率;另一方面,弹簧一206将左翼杆109的惯性功转为弹性势能后又释放施加于左翼杆上,实现了将左翼杆109的惯性功进行弹性储能释放的过程,减小了传动机构的能量损耗,同时通过选用不同刚度的弹簧一可以确保左扑翼109的最大拍动幅度,实现弹性限位功能。
62.一种基于翼根弹性储能的可控拍动幅度仿生扑翼微型飞行器其俯仰控制力矩的产生过程如下:
63.飞行器需要产生抬头俯仰控制力矩时,左旋转舵机209顺时针旋转,带动张紧绳一215向左侧运动,弹簧连接件一203约束变松,弹簧连接件一203顺时针旋转,通过弹簧带动翼杆止挡件一202顺时针旋转,从而左翼杆109上拍极限幅度增加,弹簧连接件三219在张紧绳一215带动下逆时针旋转,通过弹簧带动弹簧连接件三219逆时针旋转,从而右翼杆112下拍极限幅度减小;右旋转舵机213逆时针旋转,带动张紧绳二216向右侧运动,弹簧连接件二205在张紧绳二216带动下顺时针旋转,通过弹簧带动翼杆止挡件二204顺时针旋转,从而左翼杆109下拍极限幅度减小,弹簧连接件四221约束变松,通过弹簧带动翼杆止挡件四220逆时针旋转,从而右翼杆112上拍极限幅度增大。中间旋转舵机211保持不动,由于左翼杆109和右翼杆112的上拍极限幅度增加,下拍极限幅度减小,相当于左翼杆109拍动平均位置逆时针旋转,右翼杆112拍动平均位置顺时针旋转,但左、右翼杆的拍动幅度近似不变,因而拍动运动产生的气动力大小近似不变,但其气动力的作用点前移,相较于舵机转动前,产生抬头力矩。同理,当飞行器需要产生低头俯仰控制力矩时,左旋转舵机209逆时针旋转,右旋转舵机213顺时针旋转,左翼杆109和右翼杆112的上拍极限幅度减小,下拍极限幅度增大,相当于左翼杆109拍动平均位置顺时针旋转,右翼杆112拍动平均位置逆时针旋转,但左、右翼杆的拍动幅度近似不变,因而拍动运动产生的气动力大小近似不变,但其气动力的作用点后移,相较于舵机转动前,产生抬头力矩。
64.一种基于翼根弹性储能的可控拍动幅度仿生扑翼微型飞行器其滚转控制力矩的产生过程如下:
65.飞行器需要产生右滚控制力矩时,左旋转舵机209顺时针旋转,带动张紧绳一215向左侧运动,弹簧连接件一203约束变松,弹簧连接件一203顺时针旋转,通过弹簧带动翼杆止挡件一202顺时针旋转,从而左翼杆109上拍极限幅度增加,弹簧连接件三219在张紧绳一
215带动下逆时针旋转,通过弹簧带动弹簧连接件三219逆时针旋转,从而右翼杆112下拍极限幅度减小;右旋转舵机213顺时针旋转,带动张紧绳二216向左侧运动,弹簧连接件二205约束变松,弹簧连接件二205逆时针旋转,通过弹簧带动翼杆止挡件二204逆时针旋转,从而左翼杆109下拍极限幅度增加,弹簧连接件四221在带动下顺时针旋转,通过弹簧带动翼杆止挡件四220顺时针旋转,从而右翼杆112上拍极限幅度减小。中间旋转舵机211保持不动,由于左翼杆109的上、下拍极限幅度增加,右翼杆112的上、下拍极限幅度减小,相当于左翼杆109拍动幅度增加,右翼杆112拍动幅度减小,左、右翼杆拍动平均位置不变,因而左扑翼拍动运动产生的气动力增大,右扑翼拍动运动产生的气动力减小,但其气动力的作用点近似不变,相较于舵机转动前,产生右滚力矩。同理,当飞行器需要产生左滚力矩时,左旋转舵机209逆时针旋转,右旋转舵机213逆时针旋转,从而左翼杆109的上、下拍极限幅度减小,右翼杆112的上、下拍极限幅度增加,相当于左翼杆109拍动幅度减小,右翼杆112拍动幅度增加,左、右翼杆拍动平均位置不变,因而左扑翼拍动运动产生的气动力减小,右扑翼拍动运动产生的气动力增大,但其气动力的作用点近似不变,相较于舵机转动前,产生左滚力矩。
66.一种基于翼根弹性储能的可控拍动幅度仿生扑翼微型飞行器其偏航控制力矩的产生过程如下:
67.飞行器需要产生左偏航控制力矩时,左旋转舵机209和右旋转舵机213保持不动,中间旋转舵机211带动凸轮212顺时针旋转,由于凸轮212直径变化,导致张紧绳一215两侧同时拉紧,张紧绳二216两侧同时约束变松。弹簧连接件一203在张紧绳一215的带动下逆时针旋转,通过弹簧带动翼杆止挡件一202逆时针旋转,从而左翼杆上拍极限幅度减小,弹簧连接件三219在张紧绳一215带动下逆时针旋转,通过弹簧带动弹簧止挡件三219逆时针旋转,从而右翼杆112下拍极限幅度减小;弹簧连接件二205约束变松,弹簧连接件二205逆时针旋转,通过弹簧带动翼杆止挡件二204逆时针旋转,从而左翼杆109下拍极限幅度增加,弹簧连接件四221约束变松,通过弹簧带动翼杆止挡件四220逆时针旋转,从而右翼杆112上拍极限幅度增大。由于左翼杆109上拍极限幅度减小,下拍极限幅度增大,右翼杆112上拍极限幅度增大,下拍极限幅度减小,相当于左翼杆109和右翼杆112的拍动平均位置同时逆时针旋转,由于左、右翼杆的转动点与飞行器重心不重合,因此左扑翼和右扑翼的侧向力将产生左偏航力矩。同理,当飞行器需要产生右偏航控制力矩时,左旋转舵机209和右旋转舵机213保持不动,中间旋转舵机211带动凸轮212逆时针旋转。
68.虽然,上文中已经用一般性说明及具体实施例对本发明作了详尽的描述,但在本发明基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本发明精神的基础上所做的这些修改或改进,均属于本发明要求保护的范围。