1.本实用新型涉及无人机技术领域,尤其涉及一种无人航空器侦查测量避撞装置。
背景技术:
2.伴随着科技的发展,航空器已在交通监视、通讯中继、气候检测和土地规划等多领域,展现出巨大的发展空间。由于航空器在执行的任务过程中,时常会遇到各种类型的障碍物,故急需一种侦测避障装置,以保障航空器的飞行安全。航空器自主避障功能的实现,建立在障碍物检测的基础之上,为此,需要结合多种传感器,对低空航空器周围环境进行自我感知。常见的探测环境的部件主要包括视觉传感器、非视觉传感器。常用的视觉传感器包括单目视觉传感器、双目视觉传感器;单目传感器无法获取深度信息,一般无法直接用于户外环境检测之用;双目传感器虽然可以获取深度信息,但由于摄像头之间的距离限制,对于检测较远距离障碍物有一定的难度。非视觉传感器包括激光、超声波、红外和雷达等传感器;激光传感器只能对一个方向进行检测;超声波传感器中超声波为机械波,有效测量距离较短,应用在航空器上时,容易受到其他信号干扰且易衰减,使得检测精度较差,测得的有效数据相对较少,无法实现精确平滑的障碍物检测及信息反馈;红外传感器的测量距离较短,无法安装在航空器上,实现高效率精准的远距离探测。
3.现有的无人机一般依靠摄像系统进行远程人工操作,无法及时做出有效反应。
4.因此,有必要提供一种无人航空器侦查测量避撞装置解决上述技术问题。
技术实现要素:
5.本实用新型解决的技术问题是提供一种无人航空器侦查测量避撞装置。
6.为解决上述技术问题,本实用新型提供的无人航空器侦查测量避撞装置,包括:安装箱体;侦查测量机构,所述侦查测量机构设于所述安装箱体的上方,所述侦查测量机构包括第一弧形箱体,所述弧形箱体设于所述安装箱体的上方,所述第一弧形箱体内固定安装有第一无刷电机,所述第一无刷电机的输出轴贯穿所述第一弧形箱体的顶部,所述第一无刷电机的输出轴的顶部固定安装有第二弧形箱体,所述第二弧形箱体底部内壁上固定安装有激光雷达装置和红外线辅助摄像机,所述激光雷达装置和所述红外线辅助摄像机的顶部均延伸至所述第二弧形箱体外,所述第二弧形箱体内设有防撞部件;辅助转动机构,所述辅助转动机构设于安装箱体内,所述辅助转动机构包括第二无刷电机,所述第二无刷电机固定安装在所述安装箱体的底部内壁上,所述安装箱体的底部内壁上转动安装有渐开线蜗杆,所述第二无刷电机的输出轴与所述渐开线蜗杆固定连接,所述安装箱体内转动安装有连接板,所述安装箱体的顶部开设有活动孔,所述连接板的顶部贯穿所述活动孔并与所述第一弧形箱体固定连接,所述连接板的底部为弧形并开设有多个齿牙,所述渐开线蜗杆与多个所述齿牙相啮合。
7.优选的,所述防撞部件包括方形安装盒,所述方形安装盒固定安装在所述第二安装箱体的底部内壁上,所述方形安装盒的底部内壁上固定安装有自弹式安全气囊,所述方
形安装盒的顶部延伸至所述第二安装箱体外,所述方形安装盒的顶部设有跃边盖子。
8.优选的,所述跃边盖子为弧形,所述跃边盖子的底部固定安装有第一磁力环,所述方形安装盒的顶部固定安装有第二磁力环,所述第一磁力环与所述第二磁力环相互靠近的一侧磁极相反。
9.优选的,所述活动孔内固定安装有弹力硅胶布,所述弹力硅胶布与所述连接板固定连接。
10.优选的,所述第一弧形箱体与所述第二弧形箱体均为轻质航空钛合金材料,所述第一弧形箱体与所述第二弧形箱体壁厚0.8-1mm。
11.优选的,所述第一磁力环与所述第二磁力环为钕铁硼材质,所述第一磁力环与所述第二磁力环型号为38h。
12.与相关技术相比较,本实用新型提供的无人航空器侦查测量避撞装置具有如下有益效果:
13.(1)、通过设置侦查测量机构和辅助转动机构,使无人机作业能够不受时间段限制,而且红外线辅助摄像机和激光雷达装置能够转动一定角度使得侦查测量范围变大,能够一定程度上降低无人机与障碍物发生碰撞的几率,从而减少损失。
14.(2)、通过设置防撞部件,使得在紧急情况下,能够释放自弹式安全气囊,防止无人机本体被撞受损,同时自弹式安全气囊释放也有利于后期进行搜寻。
15.(3)、通过设置轻质的钛合金航空材料,使得第一弧形箱体与所述第二弧形箱体重量得到了降低,有利于无人机的续航里程的提升。
附图说明
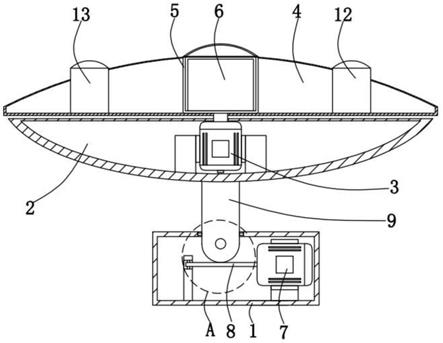
16.图1为本实用新型提供的无人航空器侦查测量避撞装置的正视剖视结构示意图;
17.图2为图1所示的无人航空器侦查测量避撞装置中方形安装盒的剖视结构示意图;
18.图3为图1中a部分的放大图;
19.图4为图2中b部分的放大图。
20.图中标号:1、安装箱体,2、第一弧形箱体,3、第一无刷电机,4、第二弧形箱体,5、方形安装盒,6、自弹式安全气囊,7、第二无刷电机,8、渐开线蜗杆,9、连接板,10、活动孔,11、弹力硅胶布,12、激光雷达装置,13、红外线辅助摄像机,14、跃边盖子,15、第一磁力环,16、第二磁力环。
具体实施方式
21.下面结合附图和实施方式对本实用新型作进一步说明。
22.请结合参阅图1、图2、图3和图4,其中,图1为本实用新型提供的无人航空器侦查测量避撞装置的正视剖视结构示意图;图2为图1所示的无人航空器侦查测量避撞装置中方形安装盒的剖视结构示意图;图3为图1中a部分的放大图;图4为图2中b部分的放大图,在本实用新型的实施例中,无人航空器侦查测量避撞装置包括:安装箱体1;侦查测量机构,所述侦查测量机构设于所述安装箱体1的上方,所述侦查测量机构包括第一弧形箱体2,所述弧形箱体2设于所述安装箱体1的上方,所述第一弧形箱体2内固定安装有第一无刷电机3,所述第一无刷电机3的输出轴贯穿所述第一弧形箱体2的顶部,所述第一无刷电机3的输出轴的
顶部固定安装有第二弧形箱体4,所述第二弧形箱体4底部内壁上固定安装有激光雷达装置12和红外线辅助摄像机13,所述激光雷达装置12和所述红外线辅助摄像机13的顶部均延伸至所述第二弧形箱体4外,所述第二弧形箱体4内设有防撞部件;辅助转动机构,所述辅助转动机构设于安装箱体1内,所述辅助转动机构包括第二无刷电机7,所述第二无刷电机7固定安装在所述安装箱体1的底部内壁上,所述安装箱体1的底部内壁上转动安装有渐开线蜗杆8,所述第二无刷电机7的输出轴与所述渐开线蜗杆8固定连接,所述安装箱体1内转动安装有连接板9,所述安装箱体1的顶部开设有活动孔10,所述连接板9的顶部贯穿所述活动孔10并与所述第一弧形箱体2固定连接,所述连接板9的底部为弧形并开设有多个齿牙,所述渐开线蜗杆8与多个所述齿牙相啮合。
23.通过设置侦查测量机构和辅助转动机构,使无人机作业能够不受时间段限制,而且红外线辅助摄像机13和激光雷达装置12能够转动一定角度使得侦查测量范围变大,能够一定程度上降低无人机与障碍物发生碰撞的几率,从而减少损失。
24.所述防撞部件包括方形安装盒5,所述方形安装盒5固定安装在所述第二安装箱体4的底部内壁上,所述方形安装盒5的底部内壁上固定安装有自弹式安全气囊6,所述方形安装盒5的顶部延伸至所述第二安装箱体4外,所述方形安装盒5的顶部设有跃边盖子14。
25.通过设置防撞部件,使得在紧急情况下,能够释放自弹式安全气囊6,防止无人机本体被撞受损,同时自弹式安全气囊释放也有利于后期进行搜寻。
26.所述跃边盖子14为弧形,所述跃边盖子14的底部固定安装有第一磁力环15,所述方形安装盒5的顶部固定安装有第二磁力环16,所述第一磁力环15与所述第二磁力环16相互靠近的一侧磁极相反。
27.通过设置第一磁力环15和第二磁力环16,使得跃边盖子14能够和方形安装盒5连接,并且在需要的时候脱离。
28.所述活动孔10内固定安装有弹力硅胶布11,所述弹力硅胶布11与所述连接板9固定连接。
29.通过设置弹力硅胶布11,使得能够防止脏污通过活动孔10进入安装箱体1内,保护内部的清洁。
30.所述第一弧形箱体2与所述第二弧形箱体4均为轻质航空钛合金材料,所述第一弧形箱体2与所述第二弧形箱体4壁厚0.8-1mm。
31.通过设置轻质的钛合金航空材料,使得第一弧形箱体2与所述第二弧形箱体4终了得到降低,有利于无人机的续航。
32.所述第一磁力环15与所述第二磁力环16为钕铁硼材质,所述第一磁力环15与所述第二磁力环16型号为38h。
33.通过设置38h的钕铁硼材质的第一磁力环15和第二磁力环16,使得两者能够有足够的吸力相互吸合,能够适应无人机的飞行速度。
34.本实用新型提供的无人航空器侦查测量避撞装置的工作原理如下:
35.首先,本装置安装在无人机外壳上,本装置中还安装有通讯模块和控制模块,第一无刷电机3、第二无刷电机7、激光雷达装置12和空外摄像机13均和控制模块连接,当需要转动激光雷达装置12和红外线辅助摄像机13时,启动第一无刷电机3,第一无刷电机3启动带动第二弧形箱体4转动,第二弧形箱体4转动带动激光雷达装置12和红外线辅助摄像机13转
动;当需要调节激光雷达装置12和红外线辅助摄像机13角度时,启动第二无刷电机7,第二无刷电机7启动带动渐开线蜗杆8转动,渐开线蜗杆8转动带动连接板9转动,连接板9转动带动第一弧形箱体2转动。第一弧形箱体2转动带动第一无刷电机3转动,第一无刷电机3转动带动第二弧形箱体4转动,第二弧形箱体4转动带动激光雷达装置12和红外线辅助摄像机13转动,从而调节了激光雷达装置12和红外线辅助摄像机13的角度;当遇到障碍物,激光雷达装置12和摄像头检测到障碍物,将信号传递给控制模块,控制模块通过通讯模块传递给操作人员,如果人员无反应,当距离障碍物过于接近时,自弹式安全气囊6启动膨胀,将跃边盖子14顶开,自弹式安全气囊6与障碍物发生接触碰撞,降低了无人机与障碍物直接碰撞造成的损失,一台无人机可以视情况和需要安装一个或多个本装置,能够使无人机多个方位都能得到保护。
36.需要说明的是,本实用新型的设备结构和附图主要对本实用新型的原理进行描述,在该设计原理的技术上,装置的动力机构、供电系统及控制系统等的设置并没有完全描述清楚,而在本领域技术人员理解上述实用新型的原理的前提下,可清楚获知其动力机构、供电系统及控制系统的具体,申请文件的控制方式是通过控制器来自动控制,控制器的控制电路通过本领域的技术人员简单编程即可实现;
37.其中所使用到的标准零件均可以从市场上购买,而且根据说明书和附图的记载均可以进行订制,各个零件的具体连接方式均采用现有技术中成熟的螺栓、铆钉、焊接等常规手段,机械、零件和设备均采用现有技术中常规的型号,且本领域技术人员知晓的部件,其结构和原理都为本技术人员均可通过技术手册得知或通过常规实验方法获知。
38.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。