1.本发明涉及无人机领域,具体涉及一种高速电力巡检复合式共轴无人直升机。
背景技术:
2.近些年随着无人机技术的发展,无人机逐渐替代人工进行电力巡线,已成为一个重要的研究方向。目前市场上常见的电力巡检无人机存在着诸多问题:常见电力巡检无人机一般载荷量较小,执行任务过程中只能携带激光雷达、热红外摄像机、可将光相机部中的一种。单次采集数据量有限,采集有效性低,在巡检过程中对巡检目标需要多次拍摄才能弥补由于任务载荷对焦失败,无法准确对准目标等问题,前端拍摄大量信息多为无效性信息。
3.随着线路里程不断增加,航时短的巡检无人机需要配备多块电池,单次任务量小,且极大程度地影响到了工作效率。在航时本就不高的情况下,目前市场上常见的电力巡检无人机飞行速度较慢,导致了工作效率低,在给定时间内,巡检里程较低。
4.因此,如何提供一种载荷大、速度快、巡检效率高的飞行可靠的高速电力巡检复合式共轴无人直升机是本领域技术人员亟需解决的问题。
技术实现要素:
5.有鉴于此,本发明提供了一种高速电力巡检复合式共轴无人直升机,飞行稳定,可完成电力设备的巡检,效率高。
6.为了达到上述目的,本发明采用如下技术方案:一种高速电力巡检复合式共轴无人直升机,其包括机体、双旋翼装置、尾推装置、巡检箱、操纵系统及地面控制显示系统,所述机体呈流线型,所述双旋翼装置包括上旋翼、下旋翼、内轴、外轴套、上倾斜盘组件、下倾斜盘组件、上旋翼变矩连杆及下旋翼变矩连杆,所述内轴转动连接在所述外轴套的内侧且其均转动连接在所述机体的顶部,所述上旋翼及下旋翼分别一一对应固定在所述内轴及外轴套上且转向相反,所述上倾斜盘组件转动连接在所述外轴套上且位于所述下旋翼的底部,所述下旋翼变矩连杆分别连接所述下旋翼及上倾斜盘组件,所述下倾斜盘组件转动连接在所述内轴上且对应位于所述上倾斜盘组件的下方,所述上旋翼变矩连杆分别连接所述上旋翼及下倾斜盘组件,所述操纵系统分别连接上倾斜盘组件及下倾斜盘组件控制下旋翼及上旋翼的周期变矩;所述尾推装置固定在所述机体的尾部,所述巡检箱固定在所述机体的底部,所述巡检箱内固定有激光雷达及智能巡检设备,所述地面控制显示系统分别与操纵系统、激光雷达、智能巡检设备电信号连接。
7.本发明的有益效果是:通过内轴及外轴套的作用实现上旋翼与下旋翼的转动,通过上倾斜盘组件与下倾斜盘组件控制下旋翼及上旋翼的周期变矩,完成机体的横向纵向变向飞行,尾推装置加强了航向操纵性,提高了无人直升机的巡航速度,使之更适用于电力巡检的工作。巡检箱内的智能巡检设备及激光雷达保证机体的航向,完成电力巡检任务,整体结构抗风能力突出,双旋翼装置提高了机体的挂载,可以配备大容量电池,增加巡检航程,巡检效率高。
8.优选的,所述尾推装置包括两两成组的尾推螺旋桨,所述机体的尾部两侧固定连接有安装架,所述尾推螺旋桨分别一一对应转动连接在所述安装架上。
9.优选的,所述智能巡检设备包括高像素变焦可见光相机部、红外相机部、日盲紫外线相机部及激光测距部,所述高像素变焦可见光相机部、红外相机部、日盲紫外线相机部及激光测距部分别与所述地面控制显示系统电信号连接。
10.优选的,所述上倾斜盘组件包括上倾斜盘本体及上倾斜盘舵机组,所述上倾斜盘舵机组包括三个上倾斜盘舵机,其分别固定在所述上倾斜盘本体的外周控制上倾斜盘本体的上下偏心升降摆动;所述下倾斜盘组件包括下倾斜盘本体及下倾斜盘舵机组,所述下倾斜盘舵机组包括三个下倾斜盘舵机,其分别固定在所述下倾斜盘本体的周侧控制下倾斜盘本体的上下偏心升降摆动。
11.优选的,所述上旋翼及下旋翼均包括桨毂及桨夹,所述桨夹两两成组分别转动连接在所述桨毂的两侧,所述桨夹上固定连接桨叶。
12.优选的,所述巡检箱的内部具有容置腔,所述巡检箱的外侧壁开设雷达孔及多个巡检信息收集孔。
附图说明
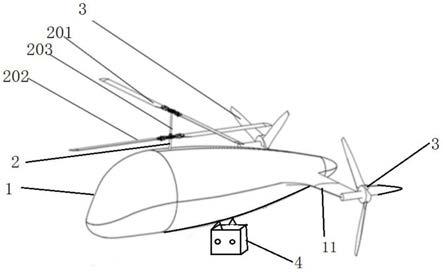
13.图1为本发明一种高速电力巡检复合式共轴无人直升机的整体结构示意图;
14.图2为本发明一种高速电力巡检复合式共轴无人直升机的双旋翼装置安装示意图;
15.图3为本发明一种高速电力巡检复合式共轴无人直升机的控制系统图。
16.1机体、2双旋翼装置、201上旋翼、202下旋翼、203内轴、204外轴套、205上倾斜盘组件、2051上倾斜盘本体、2052上倾斜盘舵机组、206下倾斜盘组件、2061下倾斜盘本体、2062下倾斜盘舵机组、207上旋翼变矩连杆、208下旋翼变矩连杆、3尾推装置、4巡检箱、5操纵系统、6激光雷达、7高像素变焦可见光相机部、8红外相机部、9日盲紫外线相机部、10激光测距部、11安装架、12地面控制显示系统、13智能巡检设备。
具体实施方式
17.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
18.参阅本发明附图1至3,根据本发明实施例一种高速电力巡检复合式共轴无人直升机,其包括机体1、双旋翼装置2、尾推装置3、巡检箱4、操纵系统5及地面控制显示系统12,机体1呈流线型,双旋翼装置2包括上旋翼201、下旋翼202、内轴203、外轴套204、上倾斜盘组件205、下倾斜盘组件206、上旋翼变矩连杆207及下旋翼变矩连杆208,内轴203转动连接在外轴套204的内侧且其均转动连接在机体1的顶部,上旋翼201及下旋翼202分别一一对应固定在内轴203及外轴套204上且转向相反,上倾斜盘组件205转动连接在外轴套204上且位于下旋翼202的底部,下旋翼变矩连杆208分别连接下旋翼202及上倾斜盘组件205,下倾斜盘组件206转动连接在内轴203上且对应位于上倾斜盘组件205的下方,上旋翼变矩连杆207分别
连接上旋翼201及下倾斜盘组件206,操纵系统5分别连接上倾斜盘组件及下倾斜盘组件控制下旋翼及上旋翼的周期变矩;尾推装置3固定在机体1的尾部,巡检箱4固定在机体1的底部,巡检箱4内固定有激光雷达6及智能巡检设备13,地面控制显示系统12分别与操纵系统5、激光雷达6、智能巡检设备13电信号连接。
19.在另一些实施例中,尾推装置3包括两两成组的尾推螺旋桨,机体1的尾部两侧固定连接有安装架11,尾推螺旋桨分别一一对应转动连接在安装架11上。
20.在另一些具体实施例中,智能巡检设备13包括高像素变焦可见光相机部7、红外相机部8、日盲紫外线相机部9及激光测距部10,高像素变焦可见光相机部7、红外相机部8、日盲紫外线相机部9及激光测距部10分别与地面控制显示系统12电信号连接。本发明整合高像素变焦可见光相机部、红外相机部、日盲紫外线相机部、激光测距部。四合一巡检设备能同步进行线路表面异常、温度以及放电情况的检测并直接反馈综合数据,同时设备能融合红、紫外检测数据并保证能实时交替或同屏查看可见光和红紫外诊测结果。通过选取实际运行线路进行巡视,提高了电力巡检无人机自动巡视技术的有效性及可行性。
21.在其他一些实施例中,上倾斜盘组件205包括上倾斜盘本体2051及上倾斜盘舵机组2052,上倾斜盘舵机组2052包括三个上倾斜盘舵机,其分别固定在上倾斜盘本体2051的外周控制上倾斜盘本体的上下偏心升降摆动;下倾斜盘组件206包括下倾斜盘本体2061及下倾斜盘舵机组2062,下倾斜盘舵机组2062包括三个下倾斜盘舵机,其分别固定在下倾斜盘本体2061的周侧控制下倾斜盘本体的上下偏心升降摆动。通过上旋翼及下旋翼的周期变矩完成机体升降航向的改变。
22.具体的,上旋翼201及下旋翼202均包括桨毂及桨夹,桨夹两两成组分别转动连接在桨毂的两侧,桨夹上固定连接桨叶。通过变矩连杆连接桨夹,实现桨夹的转动,进而改变桨叶角。控制升力。
23.在另一些实施例中,巡检箱4的内部具有容置腔,巡检箱4的外侧壁开设雷达孔及多个巡检信息收集孔,激光雷达通过雷达孔完成航向的探测,智能巡检设备通过巡检信息收集孔完成电力巡检的信息采集。
24.本发明技术方案解决了目前电力巡检无人机载荷小、速度慢、航时短的问题;解决了电力巡检过程中目标识别不精确,目标识别效率低的问题。
25.机体呈流线型,在高速飞行时可以有效减小飞行阻力。高速电力巡检无人直升机采用共轴双旋翼布局,有效地减少了全机的尺寸,增强了本方案中无人直升机的抗风性能。共轴双旋翼布局上旋翼和下旋翼绕内轴及外轴套一正一反的旋转,产生的扭矩在航向不变的飞行状态下相互平衡,通过上下旋翼总距差动产生不平衡扭矩实现航向操纵。
26.双推力螺旋桨在悬停状态下不工作,当共轴直升机从低速过度到高速飞行状态时,双推力螺旋桨逐渐参与工作。本高速电力巡检无人机的操纵系统属于全差动操纵系统,下旋翼对应的航向操纵舵机与下旋翼变距连杆相连接,纵向及横向舵机通过传动机构与倾斜器相连,传递航向及周期向操纵信号。
27.具体的,舵机采用ccpm布局,可以将本身的旋转运动转化成上倾斜盘本体及下倾斜盘本体沿着内轴及外轴套的滑动运动。尾推装置在逐渐增加推力的过程中,无人机俯仰角逐渐变大,旋翼迎角也逐渐变大,旋翼产生的前飞拉力逐渐由水平推力装置替代。高速状态下,飞机姿态变换成抬头,来流从旋翼下方吹入桨盘,进入类似自转旋翼状态,提供升力,
降低需用功率。同时随着速度增加,机体也提供部分升力,为旋翼卸载。旋翼的拉力卸载使得旋翼的转速得以降低,从而延缓旋翼前行侧的气流压缩性问题,直升机因而能够飞得更快。
28.本方案设计的电力巡检无人直升机抗风能力突出、航程远、续航时间长、飞行速度快、起飞重量大,载重能力强。而且本方案综合激光雷达,以及可见光相机部、红、紫外相机部、激光测距仪组合而成的智能巡检设备不同载荷的优点,识别能力更加突出,设备体积更小,智能融合设备使巡检工作效率更高,同时激光测距部配合激光雷达使诊测更加精准。
29.对于实施例公开的装置和使用方法而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
30.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。