1.本实用新型涉及无人机领域,更具体的说,涉及一种水空两栖无人机机架结构及控制系统。
背景技术:
2.多旋翼无人机具有价格低廉,体积较小、反应快速、操作简单等优点,被广泛应用于航拍,检测等众多领域,随着多旋翼无人机的使用范围和领域的不断扩大,在河流、湖泊,以及海洋上方使用无人机进行作业已经越来越普遍。无人机面向江海湖泊的应用作业主要用于环境监测,数据采集,物资输送,水上搜救等。
3.现有的水上无人机和水陆两栖无人机采用浮筒式脚架,但是浮筒无法较方便的更换和拆卸。这种方式加大了无人机水上应用的难度。
技术实现要素:
4.本实用新型的目的是提供一种水空两栖无人机机架结构及控制系统,在不需要进行拆装浮筒的情况下可以实现水上航行、水上起降等功能。
5.本实用新型的上述技术目的是通过以下技术方案得以实现的:一种水空两栖无人机机架结构及控制系统,包括机架结构及两栖控制系统。
6.所述机架结构包括机壳、悬臂、铝合金连接件、顶盖及脚架。
7.所述机壳为开模一体成型的准密闭体,用于存放两栖控制系统及电源等核心零部件;
8.所述机壳下方与脚架通过螺丝螺母固定连接,连接处通过硅胶密封;
9.所述机壳上方与顶盖通过螺丝螺母固定连接,连接处通过硅胶密封,形成密闭空间。
10.所述顶盖由碳纤上盖板、舱盖、防水透气阀及gps固定座组成;
11.所述碳纤上盖板上对称开有2个圆孔,所述圆孔用以安装防水透气阀,以便平衡内外气压。
12.优选的,此处可以选用电磁阀,通过通道开关实现阀门通断。
13.所述碳纤上盖板安装有gps固定座,所述gps固定座用于放置gps和led指示灯;
14.所述gps固定座内置gps模块和led指示灯;
15.所述gps固定座用透明材料制作完成,以便led指示灯灯光能够透过gps固定座的防水外壳。
16.所述舱盖与碳纤上盖板之间通过硅胶密封圈及螺丝螺母连接,可打开关闭以便进行通断电及存取电池等工作;
17.所述舱盖有周围有双层硅胶密封胶条;
18.优选的,所述机壳侧边可以固定一防水相机,用于指导飞行。
19.所述机壳内部用于放置两栖控制系统和锂电池。
20.所述两栖控制系统能够实现飞行模式和船行模式的功能。所述船型模式需要在脚架上安装2个水下推进器。根据作业需求,遥控器下达作业指令,指令通过所述两栖控制系统传送到飞行模式或船行模式,从而进行空中或水中的作业。
21.所述机壳伸出6个机臂,机臂尾端通过铝合金连接件与悬臂连接。
22.所述铝合金件可以实现机臂折叠功能。
23.所述铝合金连接件由三部分组成,分别为机壳端、悬臂端和悬臂外包围端。
24.所述机壳端与悬臂端通过螺丝进行连接;
25.所述机壳端外圈有螺纹,所述悬臂外包围端内圈有螺纹,通过悬臂外包围端与机壳端螺纹旋紧,使得机臂固定。
26.所述机壳端与悬臂端铝合金连接件中间有走线孔,可供走线。
27.所述走线孔之间通过伸缩管连接,连接位置用硅胶封死,从而实现防水。
28.所述悬臂尾端为一锥形电机安装座。
29.所述锥形电机安装座设计成流线型侧面,一方面可以进行空气整流,另一方面提供浮力,使得电机和螺旋桨在水面上方。
30.所述电机座上方为一电机安装板,所述电机安装板上有固定电机的安装孔及走线孔;
31.所述碳纤板与悬臂锥形尾端连接处用硅胶封死,加螺丝固定。
32.所述电机为防水电机,轴承采用316不锈钢材质,能够防海水腐蚀。
33.所述悬臂中间可开槽以便安放电调,电调放置在悬臂外侧有利于散热,此时需要对电调进行防水处理。
34.优选的,所述电调可以放置在悬臂锥形尾端内部。
35.进一步的,所述机架上对称设置有多个旋翼桨叶。
36.相比于现有技术,本方案的有益效果如下:
37.1、本方案通过全密闭机身实现了无人机的防水,同时为无人机的水上起降、水上航行灯功能提供了保障,因此,操作人员可以无需拆卸浮体就可以水上停泊,可以在水面上安全起降和航行需求,防止沉入水底,可完成水上作业。
38.2、操作人员可以通过遥控器向无线模块发送控制指令,来控制无人机在水面或者空中的动作。
附图说明
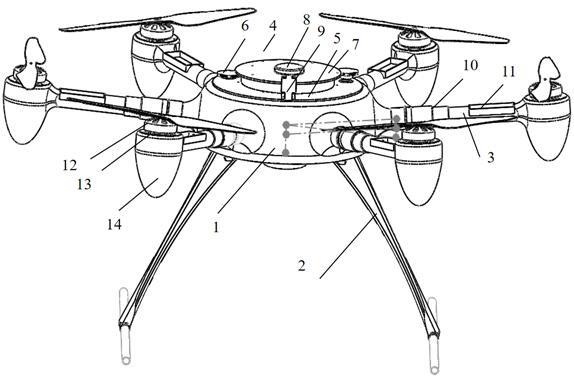
39.图1为全密闭防水机身示意图;
40.图2为水空两栖无人机铝合金连接件示意图;
41.图3为本实施例用于体现水中推进器的结构示意图;
42.图4为水空两栖控制系统原理图。
43.图中:1、机壳;2、脚架;3、悬臂;4、顶盖;5、碳纤上盖板;6、防水透气阀;7、舱盖;8、gps固定座;9、led指示灯;10、铝合金连接件;11、电调安装位;12、电机;13、电机安装板;15、机壳端铝合金件;16、悬臂端铝合金件;17、连接件固定孔;18、走线孔;19、推进器。
具体实施方式
44.下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本实用新型,而不能理解为对本实用新型的限制。
45.在本实用新型的描述中,需要理解的是,术语“厚度”、“上”、“下”、“垂直”、“平行”、“底”、“角”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
46.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“连接”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。
47.请参阅图1,本实用新型实施例提供了一种水空两栖无人机机架结构,所述水空两栖无人机机架结构具备ip67的防护等级,能够水上停泊、水上起降和水上航行。所述水空两栖无人机机架结构可以保护设置在其内的零件免遭液体损坏。
48.所述机架结构包括机壳1、脚架2、悬臂3、顶盖4及铝合金连接件10组成。所述机壳1为开模一体成型的准密闭体,用于存放两栖控制系统及电源等核心零部件;所述机壳1下方与脚架2通过螺丝螺母固定连接,连接处通过硅胶密封;所述机壳1上方与顶盖4通过螺丝螺母固定连接,连接处通过硅胶密封,形成密闭空间。所述机壳1伸出6个机臂,机臂尾端通过铝合金连接件10与悬臂3连接。优选的,所述机壳1侧边可以固定一防水相机,用于指导飞行。通过各个连接部位使用硅胶软密封,再通过螺丝螺母硬连接,从而既实现了机架结构的防水性能也保证了其牢固性。
49.所述顶盖4由碳纤上盖板5、防水透气阀6、舱盖7及gps固定座8组成;所述碳纤上盖板上对称开有2个圆孔,所述圆孔用以安装防水透气阀6,以便平衡内外气压。防水透气阀6应使用透气量较大的阀门,避免应透气量小而导致内外气压失衡,影响无人机工作。优选的,此处可以选用电磁阀,通过通道开关实现阀门通断。所述碳纤上盖板5安装由gps固定座8,所述gps固定座8用于放置gps和led指示灯9;所述gps固定座8内置gps模块和led指示灯9;所述gps固定座用透明材料制作完成,以便led指示灯9灯光能够透过gps固定座8的防水外壳。所述舱盖7与碳纤上盖板6之间通过硅胶密封圈及螺丝螺母连接,可打开关闭以便进行通断电及存取电池等工作;所述舱盖7有周围有双层硅胶密封胶条;在使用过程中,舱盖7和防水透气阀6均可以通过螺纹结构旋出或旋进,以便进行无人机通断电操作和飞行操作。在上电后,首先将舱盖7旋进碳纤上盖板5,然后旋至对应螺丝孔处,通过舱盖7上的螺丝与碳纤上盖板5上的螺柱连接从而完成机壳1的密封。
50.如图1和如图2,所述机壳1通过铝合金连接件10与悬臂3连接,铝合金件10可以实现机臂折叠功能,减小所占空间,便于运输和携带。所述铝合金连接件10由三部分组成,分别为机壳端铝合金件15、悬臂端铝合金件16和悬臂外包围端,机壳端铝合金件15外圈有螺纹,悬臂外包围端内圈有螺纹;机壳端铝合金件15与悬臂端铝合金件16先通过螺丝孔17进行连接,再通过悬臂外包围端与机壳端铝合金件15螺纹旋紧,使得机臂固定。所述机壳端铝
合金件15与悬臂端铝合金件16铝合金连接件中间有走线孔18,可供走线,走线孔18之间通过伸缩管连接,连接位置用硅胶封死,从而实现防水。该铝合金连接件10位置是防水的薄弱位置,优选的,走线伸缩管管内两端可以灌胶封死,进一步提高其可靠性。使用时,通过旋进和旋出悬臂外包围端,即可实现悬臂的折叠与伸直。
51.如图1,所述悬臂3尾端为一锥形电机安装座14,所述锥形电机安装座14设计成流线型侧面,一方面可以进行空气整流,另一方面提供浮力,使得电机和螺旋桨在水面上方。所述电机座14上方为一电机安装板13,所述电机安装板13上有固定电机12的安装孔及走线孔;所述电机安装板13与悬臂锥形尾端14连接处用硅胶封死,加螺丝固定。所述电机12为防水电机,轴承采用316不锈钢材质,能够防海水腐蚀。所述悬臂中间可开槽以便安放电调安装位11,电调放置在悬臂外侧有利于散热,此时需要对电调进行防水处理。优选的,所述电调可以放置在悬臂锥形尾端内部。在无人机水上作业后,应对防水电机12进行清理,先使用清水冲洗,再喷涂除锈剂,以增加其使用寿命。
52.如图3,该水空两栖机身机构的机壳1底部安装由推进器19,可以实现其水上航行功能;所述推进器19由2个推进单元组成,通过差速原理实现转向。该功能增加了无人机在水上的作业能力。所述推进器19通过水空两栖控制系统进行控制。该两栖控制系统能够实现飞行模式和船行模式的功能。
53.图4为水空两栖控制系统原理图,该水空两栖无人机拥有2套动力系统,分别为飞行动力系统和船行动力系统。根据作业需求,遥控器下达作业指令,指令通过两栖控制系统传送到一方动力系统,从而进行空中或水中的作业。
54.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。