1.本发明涉及航天器交会对接及在轨服务技术领域,特别是涉及一种基于钩爪与棘爪齿的空间嵌入式电磁对接机构。
背景技术:
2.在轨服务技术作为一种重要的航天技术,在实现在轨维修、在轨装配、在轨加注等方面具有重要的意义。传统的航天器在轨对接方式依赖于推进剂,在对接过程中容易发生碰撞,并且消耗推进剂会缩短航天器服役寿命,同时存在着羽流污染和冲击载荷等方面的问题。空间电磁对接是指两个航天器利用电磁力/电磁力矩调整相对位置和姿态并最终在结构上连成一个整体的技术。不同于传统的对接技术,电磁对接技术有着无燃料消耗、无对接冲击、无羽流污染和无光学干扰等方面的优势。
3.目前,大多数电磁对接机构在对接过程中除电磁力矩以外还需其他方式对航天器的姿态进行调整,并且系统较复杂。本发明涉及的对接机构可用副电磁铁产生电磁力矩,在一定角度内调节航天器姿态,并且可以在对接时提供一定的动力,结构简单,可靠性高,可重复工作,易于系统集成。并且,该锁紧机构采用多种方式对两个航天器进行限位锁紧,采用棘爪齿的方式能够提高对接精度及锁紧能力,有效防止对接后的机构松动。
技术实现要素:
4.为了克服上述现有的技术不足,本发明提供了一种基于钩爪与棘爪齿的空间嵌入式电磁对接机构。其采用了如下技术方案,包括:
5.电磁装置:包括主电磁铁与副电磁铁。主电磁铁安装在对接机构中轴线上,副电磁铁位于对接机构四个顶点上,共五处。
6.电磁铁由铁磁体与线圈组成。电磁铁均固定安置于基座上。
7.锁紧装置:包括钩爪,钩爪槽、棘爪齿、电机组件、限位槽、引导头、凹穴、凸点。
8.在追踪航天器上,钩爪、限位槽、电机组件、棘爪齿安装于主电磁铁前方。钩爪与电机组件相连,安装于主电磁铁周围,电机安装于对接面内,为钩爪的运动提供动力,钩爪从对接面上的开口伸出;
9.限位槽安装于主电磁铁正前方,位于对接面内侧,限位槽与导引头形状相匹配,限位槽内侧分布有棘爪齿,在对接后可以与导引头上棘爪齿相嵌合。
10.在目标航天器上,导引头、钩爪槽、棘爪齿安装于主电磁铁前方;导引头安装于主电磁铁正前方,位于对接面外侧,导引头表面有钩爪槽与棘爪齿,末端为半球形,便于进入限位槽。
11.钩爪槽安装于导引头上,直径比限位槽略大,对接时,追踪航天器上钩爪收紧进入钩爪槽中,固定两个航天器,实现径向锁紧。
12.棘爪齿安装在导引头外侧,对接时,导引头进入限位槽,与限位槽内棘爪齿相结合,实现两个航天器的法向锁紧。
13.凹穴与凸点安装于副电磁铁前方,采用凸点、凹穴相互错开,嵌入式对接结构;凸点、凹穴分布在四个顶点上(副电磁铁前),其中在目标航天器上凸点分布在两个沿对角线相对的顶点上,而追踪航天器上凸点则分布在另一对角线上。
14.凹穴位于副电磁铁正前方,凹穴点位于对接面内侧,深度与凸点长度相等;凸点位于副电磁铁前方,凸点位于对接面外侧,长度与凹穴深度相等。对接时,两个航天器上的凹穴与凸点相结合,保证两个航天器对接后锁紧的稳固。
15.位姿控制系统:包括三轴陀螺仪、三轴加速度计、激光测距仪、控制计算机。位姿控制系统安装于追踪航天器上。
16.激光测距仪安装于追踪航天器上主电磁铁旁,用于测量并向控制计算机提供两个航天器相对位置信息。
17.三轴加速度计与三轴陀螺仪均安装于追踪航天器主电磁铁后的中轴线上,测量追踪航天器三个方向加速度与角速度,为控制计算机提供追踪航天器的位置、姿态信息;
18.其中目标航天器的姿态信息能够通过自身敏感器测量直接获得,并提供给追踪航天器携带的控制计算机,用以计算相对姿态信息。
19.所述控制计算机安装于追踪航天器上,通过输入的相对位置与姿态信息给出所需理论电磁力与电磁力矩,输入给电磁装置。
20.本发明的优点:提出了一种新型空间柔性电磁对接机构,与现有机构相比,结构更简单,通过系统方案优化和模块化设计,巧妙利用电磁对接机构实施引导与对接,再用钩爪进行连接锁紧,锁紧效果稳定。由于棘爪齿设计,空间对接更加精确。采用副电磁铁调节航天器的姿态,便于系统简化,加快对接速度。
21.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
附图说明
22.为了更清楚地说明本发明的技术方案,下面将对所展示的附图作简单地介绍,附图仅是本发明的一种优选方案。
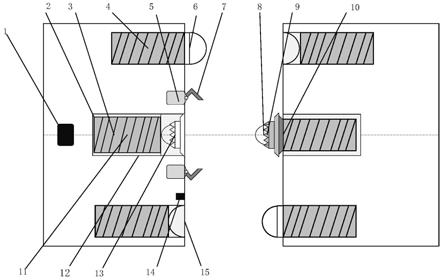
23.图1是非对接期间机构示意图。
24.图2是对接完成并锁紧后机构示意图。
25.图3是机构剖面组成图,(a)为追踪航天器机构剖面图,(b)为目标航天器机构剖面图。
26.图4是机构系统组成图。
27.图5是对接流程图。
28.图中:1.三轴加速度计与三轴陀螺仪,2.铁磁体,3.线圈,4.副电磁铁,5.电机组件,6.凸点,7.钩爪,8.导引头,9.棘爪齿,10.钩爪槽,11.主电磁铁,12.支架13.限位槽,14.激光测距仪,15.凹穴。
具体实施方式
29.以下将结合附图,对本发明的优选实施例进行详细的描述:应当理解,优选实施例
仅为了说明本发明,而不是为了限制本发明的保护范围。
30.面向两个航天器的在轨对接任务,本发明一种基于钩爪与棘爪齿的空间嵌入式电磁对接机构,通过电磁力/电磁力矩实现两个航天器相对位置与姿态的调节,结合机械装置实现锁紧对接。同样的,该过程的逆过程可实现两个航天器的解锁分离。
31.本发明一种基于钩爪与棘爪齿的空间嵌入式电磁对接机构,分为电磁装置、锁紧装置和位姿控制系统。电磁装置包括:主电磁铁和副电磁铁,电磁铁由铁磁体和线圈组成;锁紧装置包括:钩爪,钩爪槽、棘爪齿、电机组件、限位槽、引导头、凹穴、凸点;姿态调节装置包括:三轴陀螺仪、三轴加速度计、激光测距仪、控制计算机。
32.电磁装置包括:主电磁铁与副电磁铁,用于产生电磁力/电磁力矩,调节两个航天器的距离、相对速度与姿态。主电磁铁安装在对接机构中轴线上,副电磁铁位于对接机构四个顶点上,共五处。电磁铁由铁磁体与线圈组成。电磁铁均固定安置于基座上。
33.锁紧装置包括:钩爪,钩爪槽、棘爪齿、电机组件、限位槽、引导头、凹穴、凸点,用于实现两个航天器对接后的机械锁紧。钩爪与电机组件相连,安装于追踪航天器主电磁铁周围,电机安装于对接面内,为钩爪的运动提供动力,钩爪从对接面上的开口伸出;限位槽安装于追踪航天器主电磁铁正前方,位于对接面内侧,限位槽与导引头形状相匹配,限位槽内侧分布有棘爪齿,在对接后可以与导引头上棘爪齿相嵌合;导引头安装于目标航天器主电磁铁正前方,位于对接面外侧,导引头表面有钩爪槽与棘爪齿,末端为半球形,便于进入限位槽;钩爪槽安装于导引头上,直径比限位槽略大,对接时,追踪航天器上钩爪收紧进入钩爪槽中,固定两个航天器,实现径向锁紧;棘爪齿安装在导引头外侧,对接时,导引头进入限位槽,与限位槽内棘爪齿相结合,实现两个航天器的法向锁紧;凸点、凹穴分布在四个顶点上(副电磁铁前),其中在目标航天器上凸点分布在两个沿对角线相对的顶点上,而追踪航天器上凸点则分布在另一对角线上,凹穴深度与凸点长度相等,对接时,两个航天器上的凹穴与凸点相结合,保证两个航天器对接后锁紧的稳固。位姿控制系统包括:三轴陀螺仪、三轴加速度计、激光测距仪、控制计算机。激光测距仪安装于追踪航天器上主电磁铁旁,用于测量并向控制计算机提供两个航天器相对位置信息;三轴加速度计与三轴陀螺仪均安装于追踪航天器中轴线上,主电磁铁后,测量追踪航天器三个方向加速度与角速度,为控制计算机提供追踪航天器姿态信息。
34.本发明的优选方案为:当两个航天器在轨靠近至进入捕获域时,目标航天器的主电磁铁与副电磁铁通过恒定电流,在对接过程保持恒定磁场,主电磁铁产生的磁场强度较大,副电磁铁产生的磁场强度较小。追踪航天器通过激光测距仪获得两个航天器的相对位置信息并导入控制计算机,该电磁对接机构开始工作,追踪航天器主电磁铁产生与目标航天器主电磁铁相同方向的磁场,两个航天器相互吸引;同时副电磁铁产生强度较小的磁场,两航天器副电磁铁相互吸引,产生电磁力矩,为两个航天器的姿态调节提供动力。
35.本发明的优选方案为:当两个航天器距离减小到一定值后,且获得一定相对速度后,追踪航天器主电磁铁所通电流反向,主电磁铁之间相互排斥;同时,副电磁铁保持相互吸引状态,产生电磁力矩,调节两个航天器的姿态,但电磁斥力大于电磁引力,两个航天器相对速度逐渐降低。最终在两个航天器达到对接状态时,相对速度满足柔性软对接,相对姿态也满足对接要求。
36.本发明的优选方案为:两个航天器达到对接状态时,导引头滑入限位槽,棘爪齿之
间相互匹配结合,两个航天器的凸点与凹穴相互结合,钩爪在电机的驱动下从张开状态变为收紧状态,钩爪滑入钩爪槽并锁紧,实现两个航天器的机械锁紧,两个航天器主电磁铁与副电磁铁断电,完成对接。
37.本发明的优选方案为:当两个航天器要从对接状态变为分离状态时,钩爪在电机的驱动下由锁紧状态变为张开状态,两个航天器主电磁铁与副电磁铁通电,主电磁铁之间相互排斥,两个航天器副电磁铁之间相互吸引,合力表现为电磁斥力,在保持两个航天器姿态稳定的同时两个航天器缓慢加速分离,导引头与限位槽相互分离,两个航天器凸点与凹穴相互分离,两个航天器处于分离状态。
38.以上所述仅为本发明的优选实施例,并不用于限制本发明,显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。