1.本发明涉及微型飞行器领域,具体是一种利用尾翼辅助控制的仿生微型扑翼飞行器。
背景技术:
2.微型飞行器是20世纪90年代中期发展起来的一种新型飞行器。近二十年来,随着传统飞行器设计技术的不断提高和微电子技术的不断成熟,微型飞行器被提出并快速发展。微型飞行器具有体积小、重量轻、隐蔽性好等特征,在侦察、通讯、勘探、协助救援等军民领域均有广泛的应用前景。
3.仿生微型扑翼飞行器作为微型飞行器的一个重要分支,随着仿生学设计的发展日益成熟。仿生微型扑翼飞行器具有仿生外形,其借鉴生物飞行原理,具有机动性强、隐蔽性强、可悬停等能力。近年来,随着人们对昆虫和蜂鸟飞行力学的深入研究,仿生微型扑翼飞行器在微型化方向上有了进一步发展。
4.目前实际设计的仿蜂鸟微型扑翼飞行器,其两侧扑翼和机构在制造过程中很难达到严格对称,因此飞行器在飞行过程中存在难以避免的初始偏差力矩,需要足够的控制力矩来平衡初始偏差力矩。当前,多数设计的仿生微型扑翼飞行器样机,多通过控制柔性翼变形实现上下拍攻角变化的方式产生对飞行器的控制力矩(如专利cn109436320a,一种飞行器和专利cn110703788a,一种微型扑翼飞行器的增稳控制方法及其实现),但由于柔性翼变形同时改变升力与力矩,在保证升力的条件下进行力矩控制存在控制效率不高、控制手段单一、控制力矩不足等缺点,难以满足飞行器平衡姿态和高机动运动所需的较大控制力矩产生需求。此外,在悬停飞行时,扑翼攻角通常设计在最佳效率拍动攻角,当利用攻角控制改变力矩时,扑翼的攻角势必偏离悬停状态下效率最高的设计攻角,使得飞行器的气动效率和续航时间下降。为解决这一问题,除应用传统的翼攻角控制方法进行力矩产生控制外,还应该积极探索其他形式的力矩控制方法在仿生微型飞行器上的应用。
技术实现要素:
5.本发明针对现有仿生微型扑翼飞行器大多采用攻角控制方案,控制力矩产生方法单一、控制力矩不足、控制过程中攻角偏离高效运动范围导致气动效率下降、续航时间短等问题,提出一种利用尾翼辅助控制的仿生微型扑翼飞行器,通过尾翼的辅助作用来增加控制力矩,并利用尾翼与扑翼的协同控制来改善仿生微型扑翼飞行器在悬停和垂直起降状态时的姿态控制效果,降低飞行器平飞状态的能耗,提高飞行器的续航时间。
6.一种利用尾翼辅助控制的仿生微型扑翼飞行器,包括扑翼、电机、传动机构和控制机构。
7.所述扑翼包括左侧翼和右侧翼。所述左侧翼和右侧翼结构相同,均包括前缘翼杆、侧翼杆和翼膜,前缘翼杆与翼膜上缘粘接,侧翼杆与翼膜侧缘粘接,左、右侧翼往复拍动为飞行器提供克服重力的升力、平飞的推力以及姿态控制的气动力矩。所述侧翼杆插入控制
机构俯仰控制舵机固定架上的侧翼杆限位孔中,通过俯仰控制舵机固定架拉动实现侧翼杆前后位置改变,据此改变翼膜在上下拍过程中膜的松紧程度和攻角,从而改变翼上产生的力和力矩。
8.所述电机为微型电机,为飞行器提供动力。
9.所述传动机构包括齿轮减速组、曲柄、传动放大机构。所述齿轮减速组和曲柄将飞行器电机的高速圆周运动转化为低频往复拍动运动,所述传动放大机构将该往复拍动运动幅度进一步放大,带动所述扑翼以较大幅度进行往复拍动,以产生升力。为减小扑翼运动的惯性载荷从而降低电机功耗、提高飞行器气动效率,所述扑翼的拍动幅度不小于150度。
10.所述控制机构包括控制舵机、舵机固定架和尾翼。所述控制舵机包括滚转控制舵机和俯仰控制舵机,分别用于滚转和俯仰姿态控制。所述舵机固定架包括滚转控制舵机固定架和俯仰舵机固定架,分别用于固定滚转控制舵机和俯仰控制舵机。所述俯仰控制舵机固定架底边两端分别预留有两个侧翼杆限位孔和两个尾翼固定件安装孔,前者限位孔的直径大于所述侧翼杆直径用于限制侧翼杆位置,后者安装孔用于固定尾翼固定件以带动尾翼偏转。
11.所述尾翼包括尾翼固定件、尾翼杆和尾翼面。所述尾翼固定件与俯仰控制舵机固定架两端的尾翼固定件安装孔位铆接,并可绕尾翼固定件安装孔位自由转动,另一端预留尾翼杆固定孔。所述尾翼杆的顶端固定在尾翼杆固定孔中,底端与所述尾翼面粘接。所述尾翼面共有两片,为圆形、矩形或三角形硬片,分别位于左、右侧翼的下方,均采用粘接方式固定在所述尾翼杆底端,作为气动力矩产生的额外气动面,用于补充扑翼气动力矩的产生,增强飞行器的飞行姿态控制能力。尾翼固定件、尾翼杆、尾翼面以及俯仰控制舵机连接完成后,通过所述尾翼整体绕铆钉连接处的转动,可以实现所述尾翼面的上下、左右位置可调节,为保证尾翼面上产生足够的气动力,两侧尾翼面水平方向可调范围均不超出左侧扑翼或右侧扑翼展长,竖直方向调节范围为距离拍动平面(扑翼拍动时所述前缘翼杆扫过的平面)不超过两倍展长。
12.为保证所述尾翼面的位置不会给飞行器带来初始力矩,飞行器初始工作前,所述尾翼面与所述扑翼运动至拍动平均位置时的左侧扑翼与右侧扑翼均处同一竖直平面,且所述左右尾翼面左右位置对称。
13.应用于本发明的所述尾翼作用如下:
14.(1)在飞行器受到外界扰动引发偏航和俯仰转动时,所述尾翼面可充当阻尼舵面,抑制外界扰动。
15.仿生微型扑翼飞行器处于悬停平衡状态且由于外界扰动导致飞行器具有某一方向的俯仰或偏航趋势时,所述尾翼随飞行器机身同向旋转,所述左右尾翼面上均产生与飞行器俯仰或偏航趋势反方向阻力,所述尾翼充当阻尼舵面可增加飞行器俯仰或偏航姿态的稳定性。
16.(2)应用于本发明的所述尾翼面处于扑翼产生的下洗气流中,下洗气流冲击作用于尾翼面上,产生控制力矩,增加飞行器俯仰或偏航姿态的稳定性。
17.仿生微型扑翼飞行器在悬停状态时,所述扑翼在周期性往复拍动过程中产生下洗气流,当所述尾翼面与下洗气流方向有夹角时,下洗气流冲击所述尾翼面,在未受气流冲击的尾翼面另一侧产生垂直于尾翼面的力,进而产生俯仰力矩。因此,所述俯仰控制舵机通过
所述俯仰舵机固定架带动尾翼面向前或向后摆动,使得尾翼面与下洗气流方向形成夹角,在翼膜松紧导致攻角变化产生期望的俯仰力矩的基础上,可进一步补充俯仰力矩产生,增加飞行器整体俯仰力矩。
18.(3)所述尾翼与所述扑翼进行协同控制,共同作用以产生飞行姿态控制所需要的气动力矩。
19.过去仿生微型飞行器的飞行控制仅通过改变柔性翼翼膜松紧程度,以改变膜上下拍过程中的攻角大小产生变化的气动力和气动力矩。调节扑翼翼膜松紧的方式具有气动力和力矩响应快速的特点,有助于实现和维持飞行器的增稳飞行。但这一调节方式容易使翼的攻角超出气动效率较高的攻角范围,造成飞行器的性能下降。本发明通过尾翼与扑翼的协同控制,利用控制舵机调节翼膜松紧的同时,利用舵机固定架带动尾翼转动,尾翼转动产生的力矩与舵机调节翼膜松紧产生的力矩方向一致,因此需要翼膜松紧调节产生的力矩减小,需要扑翼攻角改变的幅度减小,可以使飞行器的气动效率能够始终维持在较优的范围。
20.具体而言,应用本发明一种利用尾翼辅助控制的仿生微型扑翼飞行器扑翼与尾翼协同进行控制产生俯仰力矩的具体产生方法为:
21.(1)当飞行器增稳飞行及机动飞行需要产生俯仰低头力矩时,所述俯仰控制舵机接收低头指令,通过所述舵机固定架拉动所述侧翼杆绕翼根向前偏转,并带动左右尾翼面同时向前摆动相同幅度。在此过程中,扑翼下拍翼膜松弛,攻角变小,上拍翼膜张紧,攻角变大,下拍阶段的阻力变小,上拍阶段阻力变大,拍动平面(所述扑翼前缘翼杆运动形成的平面)上的阻力不为零,气动阻力产生了绕重心的俯仰低头力矩。所述扑翼拍动过程中产生的下洗气流冲击左右尾翼面,在未受气流冲击的尾翼面另一侧产生垂直于尾翼面的力,对飞行器整体而言产生了与低头力矩方向相同的力矩,从而增加飞行器整体低头力矩的大小,增强飞行器的低头控制效果。
22.(2)当飞行器增稳飞行及机动飞行需要产生俯仰抬头力矩时,所述俯仰控制舵机接收抬头指令,通过所述舵机固定架拉动所述侧翼杆绕翼根向后偏转,并带动左右尾翼面同时向后摆动相同幅度。在此过程中,扑翼上拍翼膜松弛,攻角变小,下拍翼膜张紧,攻角变大,下拍阶段的阻力变大,上拍阶段阻力变小,拍动平面(所述扑翼前缘翼杆运动形成的平面)上的阻力不为零,气动阻力产生了绕重心的俯仰抬头力矩。所述扑翼拍动过程中产生的下洗气流冲击左右尾翼面,在未受气流冲击的尾翼面另一侧产生垂直于尾翼面的力,对飞行器整体而言产生了与抬头力矩方向相同的力矩,从而增加飞行器整体抬头力矩的大小,增强飞行器的抬头控制效果。
23.(3)应用本发明的所述尾翼可通过所述俯仰控制舵机带动,实现飞行器俯仰姿态倾斜,带动飞行器由悬停状态转为平飞状态。
24.飞行状态转换过程为:所述俯仰控制舵机通过俯仰舵机固定架带动所述左右尾翼同时向前摆动较大幅度,飞行器产生一个较大的低头力矩,使得飞行器产生低头运动,当飞行器机身由竖直状态转变为与水平面5
‑
20
°
夹角时,所述俯仰控制舵机恢复初始位置,并依据飞行器俯仰控制需要,绕初始位置附近小幅摆动,配平俯仰力矩,该转换过程中,尾翼的作用是加快飞行器的转换过程,减小飞行状态转换的时间,避免在此过程中的升力、飞行高度降低。飞行器由悬停状态转变为平飞状态后,作用于翼面的来流速度增加,飞行器滞空所需推力减小,可以在一定程度上降低所述扑翼拍动频率和拍动幅度来降低飞行器滞空所需
功耗,增大飞行器的续航时间。
25.尾翼模型也经常在仿鸟扑翼飞行器上得到应用。仿鸟扑翼飞行器的主要飞行状态为平飞,通过扑翼的拍动增加来流速度,控制力矩仅由尾翼产生,尾翼的形状与常见的固定翼飞行器的尾翼类似,多为“t”形尾翼或“v”形尾翼。不同于仿鸟扑翼飞行器,本发明的一种仿生微型扑翼飞行器的主要飞行状态为悬停飞行,且主要的飞行力矩由扑翼产生,尾翼形状为分开的片状,与扑翼起协同作用增加飞行器的控制力矩,且平飞状态时,可以通过调整尾翼的左右位置来改变尾翼上产生的气动力的大小。
26.本发明的优点在于:
27.(1)一种利用尾翼辅助控制的仿生微型扑翼飞行器,本发明提出了一种新的仿生微型扑翼飞行器的布局,对扑翼产生的下洗气流加以利用,且不会对飞行器的飞行过程产生不利影响;
28.(2)一种利用尾翼辅助控制的仿生微型扑翼飞行器,本发明提出的尾翼能够在飞行器受到外界扰动引发俯仰和偏航转动时充当阻尼舵面,抑制外界扰动运动,增加飞行器俯仰和偏航姿态的稳定性;
29.(3)一种利用尾翼辅助控制的仿生微型扑翼飞行器,本发明提出的尾翼可充当仿生微型扑翼飞行器的额外控制舵面,与扑翼协同作用,增强飞行器姿态的控制效果。
30.(4)一种利用尾翼辅助控制的仿生微型扑翼飞行器,本发明提出的尾翼可带动飞行器由悬停状态快速转为平飞状态,减少飞行状态转换过程中的升力、高度损失和平飞状态滞空所需推力,可通过降低扑翼拍动频率和拍动幅度来降低飞行器滞空所需功耗,增加续航时间。
附图说明
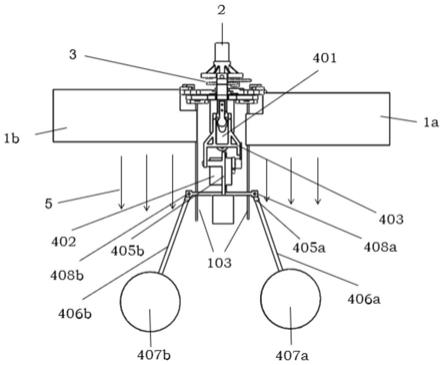
31.图1是本发明一种利用尾翼辅助控制的仿生微型扑翼飞行器构成图;
32.图2是本发明一种利用尾翼辅助控制的仿生微型扑翼飞行器低头力矩示意图;
33.图3是本发明一种利用尾翼辅助控制的仿生微型扑翼飞行器抬头力矩示意图;
34.图4是本发明一种利用尾翼辅助控制的仿生微型扑翼飞行器平飞示意图;
35.图中:
[0036]1‑
扑翼2
‑
电机3
‑
传动机构
[0037]4‑
控制机构5
‑
下洗气流
[0038]
101
‑
前缘翼杆102
‑
侧翼杆103
‑
翼膜
[0039]
401
‑
滚转控制舵机402
‑
俯仰控制舵机403
‑
滚转控制舵机固定架
[0040]
404
‑
俯仰控制舵机固定架405
‑
尾翼固定件406
‑
尾翼杆
[0041]
407
‑
尾翼408
‑
铆钉
具体实施方式
[0042]
下面结合附图对本发明的具体实施方法进行详细说明。
[0043]
如图1所示,本发明一种利用尾翼辅助控制的仿生微型扑翼飞行器,包括扑翼1、电机2、传动机构3和控制机构4。扑翼包括左侧翼1a和右侧翼1b,两翼均包括前缘翼杆101、侧翼杆102和翼膜103,翼膜103为矩形,前缘翼杆101与所述翼膜103的上缘粘接,侧翼杆102与
翼膜103的侧缘粘接;电机2为飞行器的动力源;传动机构3包括齿轮减速组、曲柄和传动放大机构,将电机2的高速圆周运动转化为往复拍动运动,并将该运动放大,带动扑翼1以较大幅度进行往复拍动,以产生升力;控制机构4包括滚转控制舵机401、俯仰控制舵机402、固定舵机位置的滚转控制舵机固定架403、俯仰控制舵机固定架404、左侧尾翼固定件405a、右侧尾翼固定件405b、左尾翼杆406a、右尾翼杆406b、左尾翼面407a、右尾翼面407b、左侧铆钉408a和右侧铆钉408b。
[0044]
左尾翼面407a和右尾翼407面b为圆形、矩形或三角形硬片(图1以圆形为例),采用粘接方式固定在左尾翼杆406a和右尾翼杆406b上,飞行器处于平衡位置时,尾翼面407a、407b与扑翼1运动至拍动平均位置时的两翼处于同一平面,且所述左右尾翼面407a、407b左右位置对称。滚转控制舵机固定架403用于固定滚转控制舵机401的位置,俯仰控制舵机固定架404用于固定俯仰控制舵机402的位置。俯仰控制舵机固定架404底边两端设置凹槽,凹槽两侧壁上分别预留通孔,尾翼固定件405一端为半圆弧形,在圆心位置预留与凹槽两侧壁上直径相同的通孔,该端插入凹槽,通过铆钉408穿过通孔与俯仰控制舵机固定架404铆接,所述尾翼固定件405可以以铆钉408位置为轴转动,尾翼固定件405另一端预留内孔,尾翼杆406的一端插入内孔中固定,另一端与尾翼面407固连,实现尾翼面407的位置可调,且调节范围在扑翼拍动的下洗气流5范围内,两侧尾翼面407水平方向可调范围均不超出单边展长,竖直方向调节范围为距离拍动平面(扑翼拍动时所述前缘翼杆扫过的平面)不超过两倍展长。
[0045]
图1中仿生微型扑翼飞行器处于悬停平衡状态,而由于外界扰动导致飞行器具有某一方向的俯仰或偏航趋势时,所述尾翼随飞行器机身同向旋转,所述左右尾翼面407上均产生与飞行器俯仰或偏航趋势反方向阻力,所述尾翼面在此过程中充当阻尼舵面,增加飞行器俯仰或偏航姿态的稳定性。
[0046]
如图2所示,仿生微型扑翼飞行器在增稳飞行及机动飞行需要产生俯仰低头力矩时,俯仰控制舵机402接收低头指令后,通过俯仰控制舵机固定架404拉动侧翼杆102绕翼根向前偏转,并带动左右尾翼面407同时向前摆动相同幅度。在此过程中,扑翼1下拍翼膜103松弛,攻角变小,上拍翼膜103张紧,攻角变大,下拍阶段的阻力变小,上拍阶段阻力变大,拍动平面(扑翼前缘翼杆101运动形成的平面)上的阻力不为零,气动阻力产生了绕重心的俯仰低头力矩。扑翼1拍动过程中产生的下洗气流5冲击尾翼面407,在来流方向的另一侧产生垂直于尾翼面407的力,对飞行器整体而言产生了与低头力矩方向相同的力矩,从而增加飞行器整体低头力矩的大小,增强飞行器的低头控制效果。
[0047]
如图3所示,仿生微型扑翼飞行器在增稳飞行及机动飞行需要产生俯仰低头力矩时,俯仰控制舵机402接收抬头指令后,通过俯仰控制舵机固定架404拉动侧翼杆102绕翼根向后偏转,并带动左右尾翼面407同时向后摆动相同幅度。在此过程中,扑翼1上拍翼膜103松弛,攻角变小,下拍翼膜103张紧,攻角变大,下拍阶段的阻力变大,上拍阶段阻力变小,拍动平面(扑翼前缘翼杆101运动形成的平面)上的阻力不为零,气动阻力产生了绕重心的俯仰抬头力矩。扑翼1拍动过程中产生的下洗气流5冲击尾翼面407,在来流方向的另一侧产生垂直于尾翼面407的力,对飞行器整体而言产生了与抬头力矩方向相同的力矩,从而增加飞行器整体抬头力矩的大小,增强飞行器的抬头控制效果。
[0048]
如图4所示,所述俯仰控制舵机402通过所述俯仰舵机固定架404带动左右尾翼407
同时向前摆动较大幅度,飞行器产生一个较大的低头力矩,使得飞行器产生低头运动,当飞行器机身由竖直状态转变为与水平面5
‑
20
°
夹角时,所述俯仰控制舵机402恢复初始位置,并依据飞行器俯仰控制需要,绕初始位置附近小幅转动,配平俯仰力矩,该转换过程中,尾翼面407的作用是加快飞行器的转换过程,减小飞行状态转换的时间,避免在此过程中的升力、飞行高度降低。飞行器由悬停状态转变为平飞状态后,作用于翼面的来流速度增加,飞行器滞空所需推力减小,可以在一定程度上降低所述扑翼4拍动频率和拍动幅度来降低飞行器滞空所需功耗,增加飞行器的续航时间。