1.本发明涉及航空计领域,特别涉及一种复合翼无人机螺旋桨定位锁止装置及定位锁止方法。
背景技术:
2.近年来,复合翼无人机因其既能像复合翼无人机一样垂直起飞,亦能像固定翼无人机一样高速、长航时巡航飞行而备受关注。复合翼无人机是将固定翼和旋翼相结合的一种无人机,其在起飞降落阶段采用旋翼,从而简单有效地解决了固定翼在起飞降落时对场地要求高的难题;在巡航阶段采用固定翼,可弥补旋翼无人机飞行速度低、航程短、航时短和飞行稳定性不足等缺点。然而复合翼无人机在巡航飞行时,螺旋桨可能会随气流的变化而不停转动,这样不仅会增加飞行阻力,还会影响无人机的飞行性能。因此,在巡航飞行阶段,将螺旋桨锁止在固定位置具有重大意义。
3.目前,用于复合翼无人机螺旋桨定位锁止装置还不够成熟,关键难点在于如何将装置做到功耗尽量低、高可靠性,并可多次重复使用等。
技术实现要素:
4.本发明意在提供一种复合翼无人机螺旋桨定位锁止装置及定位锁止方法,解决了现有的复合翼无人机在巡航飞行阶段螺旋桨锁止固定的问题。
5.为了达到上述目的,本发明的技术方案如下:一种复合翼无人机螺旋桨定位锁止装置,包括凹凸盘和定位锁止机构,所述凹凸盘包括横截面形状为“王”字形的过渡连接件和凹凸齿,所述过渡连接件包括内部中空的固定柱和设置在固定柱上下两端的圆柱台,位于上侧的所述圆柱台与螺旋桨连接在一起,位于上侧的所述圆柱台上设有圆柱凸台,两个所述圆柱台之间设有包覆在固定柱上的圆形板,所述凹凸齿螺栓连接在圆形板上;所述定位锁止机构包括套管、定位锁止销和齿条,所述套管安装在无人机的底座上,所述定位锁止销与齿条均位于套管内,所述定位锁止销与齿条之间连接有缓冲弹簧,所述凹凸齿位于定位锁止销的运动轨迹上,所述齿条上啮合有齿轮,所述齿轮同轴连接有无人机舵机的输出轴上,所述无人机舵机上设有舵机安装支架,所述舵机安装支架与套管螺栓连接。
6.进一步的,所述圆形板上周向开有多个通孔,相邻的所述通孔之间的固定板上设有固定连接在固定柱上的加强筋。
7.通过上述设置,可利用通孔减轻本方案重量,有利于保持符合无人机的飞行性能;同时借助加强筋可确保凹凸盘的强度,提高本方案的稳定性。
8.进一步的,所述复合翼无人机的舵机采用断电可自锁电机。
9.与现有技术相比,本方案的有益效果:
10.1、本方案通过定位锁止销与凹凸盘间的相互作用,可驱动螺旋桨轻易、精准地到达期望位置,并实现锁止。
11.2、若定位锁止机构启动时,螺旋桨仍处于低速转动状态,通过定位锁止销和齿条
间的缓冲弹簧可以有效缓和碰撞能量,减少刚性碰撞带来的影响。
12.3、本方案采用断电可自锁舵机,功耗低,且具有可靠性强,可多次重复使用等优点,符合目前航空领域的要求。
附图说明
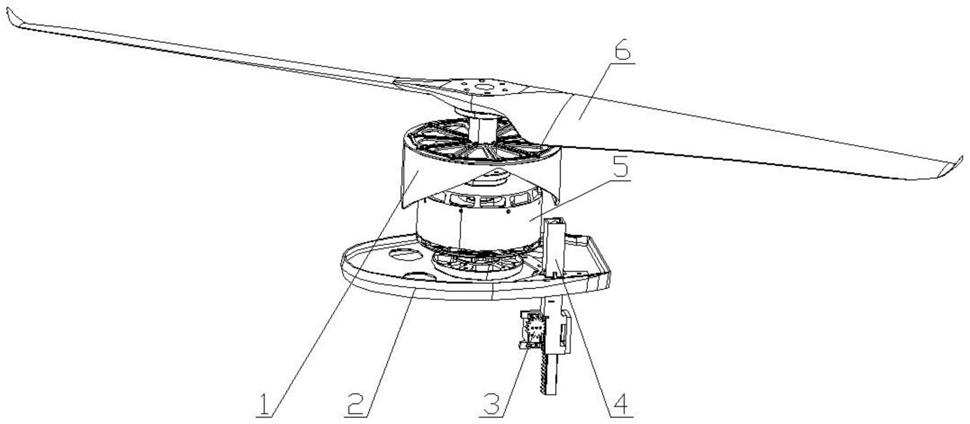
13.图1为本实施例在解锁状态的结构示意图;
14.图2为本实施例中凹凸盘的结构示意图;
15.图3为本实施例中过渡连接件的轴测图;
16.图4为本实施例中凹凸齿的轴测图;
17.图5为本实施例中定位锁止机构(不含舵机)的轴测图;
18.图6为本实施例中定位锁止机构内部结构示意图;
19.图7为本实施例中齿轮和齿条的啮合示意图;
20.图8为本实施例中舵机与齿条的连接示意图。
具体实施方式
21.下面通过具体实施方式对本发明作进一步详细的说明:
22.说明书附图中的附图标记包括:凹凸盘1、底座2、定位锁止机构3、套管4、旋翼电机5、螺旋桨6、圆柱台7、第一加强筋8、凹凸齿9、固定柱10、圆形板11、第一耳片12、半球形圆头13、齿条14、凸台15、第二耳片16、定位锁止销17、缓冲弹簧18、齿轮19、舵机20、舵机安装支架21。
23.实施例
24.如附图1至图8所示:一种复合翼无人机螺旋桨定位锁止装置,包括凹凸盘1和定位锁止机构3,凹凸盘1包括横截面形状为“王”字形的过渡连接件和凹凸齿9。过渡连接件包括内部中空的固定柱10和设置在固定柱10上下两端的圆柱台7,两个圆柱台7上均周向分布有六个螺纹间隙孔,位于上侧的圆柱台7与螺旋桨6螺栓接在一起,位于上侧的圆柱台7上设有圆柱凸台15,位于下侧的圆柱台7与旋翼电机5螺栓连接,圆柱凸台15、两个圆柱台7和固定柱10上共同贯穿有供螺旋桨6转轴通过的通孔。两个圆柱台7之间设有包覆在固定柱10上的圆形板11,凹凸齿9上设有两个凹处和两个凸处,凹凸齿9内周向均匀分布有多个第一耳片12,每个第一耳片12的中心均开有螺纹孔,凹凸齿9通过螺纹孔螺栓连接在圆形板11上。圆形板11上周向开有多个通孔,该通孔采用类三角形,相邻通孔之间的固定板上设有焊接连接在固定柱10上的第一加强筋8,所有的第一加强筋8外缘共同连接有固定环,固定环上开有与第一耳片12上相对应的螺纹孔。
25.定位锁止机构3包括套管4、定位锁止销17和齿条14,套管4的形状为方形,套管4外包覆有三个一体成型的第二耳片16,相邻的两个第二耳片16之间设有焊接在耳片与套管4之间的第二加强筋。套管4外一侧壁上一体成型有两个间隔设置的凸台15,凸台15与舵机20安装架螺栓连接。第二耳片16螺栓连接在无人机的底座2上。定位锁止销17与齿条14均滑动连接在套管4内,且定位锁止销17与齿条14均与套管4间隙配合。定位锁止销17的顶部设有与凹凸齿9相配合的半球形圆头13,定位锁止销17与齿条14之间连接有缓冲弹簧18,凹凸齿9位于半球形圆头13的运动轨迹上,齿条14上啮合有齿轮19,齿轮19同轴连接有无人机舵机
20的输出轴上,无人机舵机20上设有“l”形的舵机20安装支架。
26.本实施例中,复合翼无人机的舵机20采用断电可自锁电机。
27.定位锁止装置的定位锁止方法包括如下步骤:
28.s1、在复合翼无人机完成起降时,通过飞行控制器关闭旋翼电机5;
29.s2、在旋翼电机5停转或转速下降至预设值时,通过飞行控制器启动控制舵机20启动,此时舵机20带动齿轮19逆时针转动,利用齿轮19和齿条14来带动定位锁止销17、半球形圆头13向上移动。
30.s3、若螺旋桨6此时的位置与预期的位置存在偏差,利用定位锁止销17可驱动凹凸齿9转动,待半球形圆头13移动至凹凸齿9上凹处时实现螺旋桨6的定位锁止。
31.本实施例的解除定位锁止的方法如下:
32.通过飞行控制器来启动舵机20并使其顺时针转动,从而可使齿轮19带动齿条14向下移动,此时半球形圆头13、定位锁止销17、缓冲弹簧18和齿条14一起向下移动并逐步与凹凸盘1相分离,待半球形圆头13位于凹凸盘1外后实现解锁,此时利用飞行控制关闭舵机20即可。
33.以上的仅是本发明的实施例,方案中公知的具体结构和/或特性等常识在此未作过多描述。应当指出,对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。本技术要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。