1.本实用新型涉及一种机翼,尤其涉及一种长度能调节的伸缩机翼。
背景技术:
2.传统机翼在适应飞行任务和提升飞行效率等方面具有一定的局限性,无法通过改变机翼气动外形使飞机有效的满足多任务工况的需求。襟翼等设备虽然在一定程度上改变了机翼的气动外形,从而提升了机翼的最大升力。然而由于襟翼占机翼面积比例较小等原因,机翼气动外形的改变依有限。
3.伸缩翼可提高飞行器的飞行性能。翼长的变化会使飞行器空气动力学特性发生改变,从而影响飞行器的飞行性能。可变翼长飞行器能根据飞行时的速度、高度等飞行参数的变化调节翼长,使得气动外形与当前飞行环境相适应,让飞行器在变化的飞行环境中始终拥有较好的飞行状态,进而提高飞行器的航程,航速等性能指标。
4.利用可变翼形特性开发智能飞行控制系统,提高飞行器的可控性、适应性和通用性。可变翼长的特性,使得飞行器对于其飞行姿态拥有更多的控制方式。如当两侧机翼的长度不同时,机翼左右升力不对称产生滚转力矩,可便于飞行器的横航向操纵。飞行器的飞行控制系统能根据飞行任务要求,改变翼长以适应不同速度下巡航,从而提高飞行器通用性,便于执行多样化任务。可实现用一种平台研制多种特定任务飞机的效果,降低飞行平台的设计、制造、维护的成本。
5.翼展的改变可以降低飞行阻力提高气动效率,对低速情况飞机的飞行阻力的研究中,固定展长飞机随着速度增加飞机攻角减小,飞机的阻力与速度的曲线呈现下降趋势直到阻力最小。随着速度继续增长,飞机的浸润面积导致的摩擦阻力占主导地位,并与速度二次方成正比上升。当机翼的展长变化时,这个曲线随着展长变化水平移动,通过在不同的速度改变机翼的展长,可以显著减少飞机在一段速度上的阻力,获得更好的飞行效率。
技术实现要素:
6.本实用新型所要解决的技术问题是针对上述的技术现状而提供一种翼展连续可变的伸缩机翼结构以适应不同飞行环境。
7.本实用新型解决上述技术问题所采用的技术方案为:一种翼展连续可变的伸缩机翼结构,其特征在于包括第一主翼、第二主翼、第一翼梁、第二翼梁、第三翼梁及电推杆,前述的第一主翼靠近第二主翼的一侧具有供第二主翼伸入的内腔,前述的第一翼梁、第二翼梁和第三翼梁依次平行间隔布置并设于前述的第一主翼上,前述第一翼梁包括第一主梁及相对第一主梁能伸缩的第二主梁,前述的第三翼梁包括第三主梁及相对第三主梁能伸缩的第四主梁,前述的电推杆包括主体部及相对主体部能伸长或回缩的推杆部,前述的第二主翼一侧依次与第二主梁的外端、推杆部及第四主梁的外端连接。
8.所述的第一主翼上设有拉线传感器,该拉线传感器的线头一端固定于第二主翼上,拉线传感器的信号输出端与控制器连接,控制器的信号输出端与电机驱动模块连接,而
电机驱动模块的控制输出端则与电推杆连接。控制器、拉线传感器、电机驱动模块及电推杆构成一个反馈控制系统,精确控制机翼的伸长量,直到拉线传感器获得的距离长度与设计的距离长度一致的情况下,电推杆才停止工作。
9.进一步,所述第二主翼的后缘外侧设有能偏转从而使飞机产生滚转力矩的副翼。
10.作为优选,所述第一主梁为轴向中空,所述第二主梁外径与第一主梁的内径适配而能伸缩。
11.与现有技术相比,本实用新型的优点在于:电推杆设于中间的第二翼梁上并能驱动第二主翼相对第一主翼横向移动,从而实现伸缩翼,满足多种飞行环境要求。
附图说明
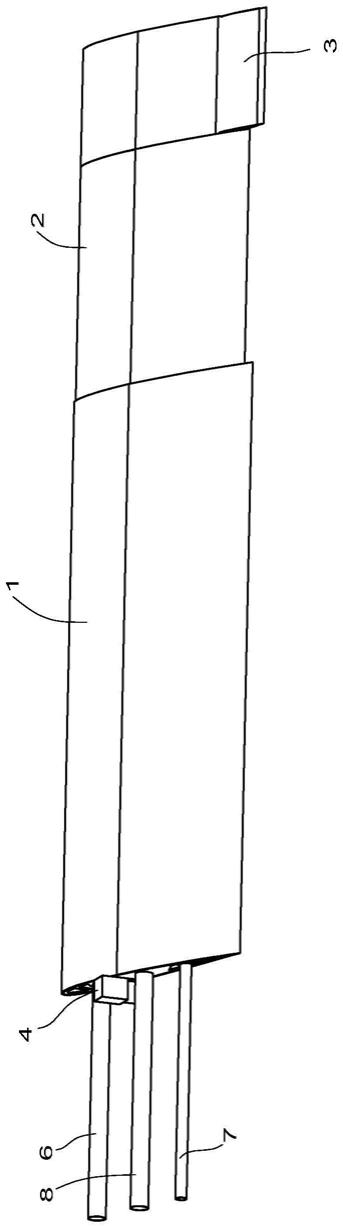
12.图1为实施例结构示意图。
13.图2为隐去第一主翼后的结构示意图。
14.图3为第一主翼结构示意图。
15.图4为实施例部分回缩后的结构示意图。
16.图5为实施例控制原理框图。
具体实施方式
17.以下结合附图实施例对本实用新型作进一步详细描述。
18.如图1、图2、图3和图4所示,本实施例中的翼展连续可变的伸缩机翼结构,包括第一主翼1、第二主翼2、第一翼梁6、第二翼梁8、第三翼梁7、电推杆5及副翼3,第一主翼1靠近第二主翼2的一侧具有供第二主翼2伸入的内腔,第一翼梁6、第二翼梁8和第三翼梁7依次平行间隔布置并设于第一主翼1上,第一翼梁6包括第一主梁61及相对第一主梁61能伸缩的第二主梁62,第三翼梁7包括第三主梁71及相对第三主梁71能伸缩的第四主梁72,电推杆5包括主体部51及相对主体部51能伸长或回缩的推杆部52,第二主翼2一侧依次与第二主梁62的外端、推杆部52及第四主梁72的外端连接。副翼3设于第二主翼2的后缘外侧。副翼3能偏转从而使飞机产生滚转力矩。
19.第一主梁61为轴向中空,第二主梁62外径与第一主梁61的内径适配而能伸缩。第三主梁71和第四主梁72参考第一主梁61和第二主梁设计62。
20.电推杆5得到指令后,推杆部52能驱动第二主翼2相对第一主翼1横向移动,完成伸缩,这里的第二主梁62与第一主梁61,第三主梁71和第四主梁72起到支撑和导向的作用。
21.结合图5所示,第一主翼1上设有拉线传感器4,该拉线传感器4的线头一端固定于第二主翼2上,并且,该拉线传感器4的信号输出端与控制器10连接,控制器10的信号输出端与电机驱动模块100连接,而电机驱动模块100的控制输出端则与电推杆5连接。控制器受控于飞控计算机20。控制器10、拉线传感器、电机驱动模块及电推杆构成一个反馈控制系统,精确控制机翼的伸长量,直到拉线传感器获得的距离长度与设计的距离长度一致的情况下,电推杆才停止工作。
技术特征:
1.一种翼展连续可变的伸缩机翼结构,其特征在于包括第一主翼(1)、第二主翼(2)、第一翼梁(6)、第二翼梁(8)、第三翼梁(7)及电推杆(5),前述的第一主翼(1)靠近第二主翼(2)的一侧具有供第二主翼(2)伸入的内腔,前述的第一翼梁(6)、第二翼梁(8)和第三翼梁(7)依次平行间隔布置并设于前述的第一主翼(1)上,前述第一翼梁(6)包括第一主梁(61)及相对第一主梁(61)能伸缩的第二主梁(62),前述的第三翼梁(7)包括第三主梁(71)及相对第三主梁(71)能伸缩的第四主梁(72),前述的电推杆(5)包括主体部(51)及相对主体部(51)能伸长或回缩的推杆部(52),前述的第二主翼(2)一侧依次与第二主梁(62)的外端、推杆部(52)及第四主梁(72)的外端连接。2.根据权利要求1所述的翼展连续可变的伸缩机翼结构,其特征在于所述的第一主翼(1)上设有拉线传感器(4),该拉线传感器(4)的线头一端固定于第二主翼(2)上,并且,该拉线传感器(4)的信号输出端与控制器(10)连接,控制器(10)的信号输出端与电机驱动模块(100)连接,而电机驱动模块(100)的控制输出端则与电推杆(5)连接。3.根据权利要求1所述的翼展连续可变的伸缩机翼结构,其特征在于所述第二主翼的后缘外侧设有能偏转从而使飞机产生滚转力矩的副翼(3)。4.根据权利要求1所述的翼展连续可变的伸缩机翼结构,其特征在于所述第一主梁(61)为轴向中空,所述第二主梁(62)外径与第一主梁(61)的内径适配而能伸缩。
技术总结
一种翼展连续可变的伸缩机翼结构,其特征在于包括第一主翼、第二主翼、第一翼梁、第二翼梁、第三翼梁及电推杆,前述的第一主翼靠近第二主翼的一侧具有供第二主翼伸入的内腔,前述的第一翼梁、第二翼梁和第三翼梁依次平行间隔布置并设于前述的第一主翼上,前述第一翼梁包括第一主梁及相对第一主梁能伸缩的第二主梁,前述的第三翼梁包括第三主梁及相对第三主梁能伸缩的第四主梁,前述的电推杆包括主体部及相对主体部能伸长或回缩的推杆部,前述的第二主翼一侧依次与第二主梁的外端、推杆部及第四主梁的外端连接。电推杆设于中间的第二翼梁上并能驱动第二主翼相对第一主翼横向移动,从而实现伸缩翼,满足多种飞行环境要求。满足多种飞行环境要求。满足多种飞行环境要求。
技术研发人员:金煜轩 潘鑫豪 朱灶旭 季廷炜
受保护的技术使用者:浙江大学
技术研发日:2021.05.24
技术公布日:2021/12/24