1.本发明涉及一种面向能源安全的太阳帆板主动控制及故障检测方法,属于航天器控制领域。
背景技术:
2.正常状态下,地球静止轨道(geo)卫星太阳帆板驱动控制方式一般按照运行轨道太阳方向变化规律,以固定的帆板转角变化速率,根据步进电机驱动周期,给出每个周期内固定的帆板转角变化量,以驱动帆板在运行轨道上匀速跟踪太阳。实际任务中,需要考虑帆板驱动机构(sada)的非常规工况:包括遥控停转、遥控快速转动到位、转角偏置设置等,以及异常工况:包括转动机构堵转、空转、过零信号异常、转角计数异常等。
3.为此,必须完善太阳帆板转动主动控制及故障检测方法,提升卫星在轨运行的自主性、灵活性和可靠性,确保整星能源满足载荷及卫星平台各部件的工作需求,在极端情况下维持卫星能源安全。
技术实现要素:
4.本发明解决的技术问题是:克服现有技术的不足,提出一种面向能源安全的太阳帆板主动控制及故障检测方法,用于自主完成帆板目标转角计算、sada转动故障检测,以及转角主动控制,解决了帆板目标转角计算、帆板转角测量的故障检测和处理、帆板转角偏差计算及分级控制三个主要问题。
5.本发明解决技术的方案是:
6.一种面向能源安全的太阳帆板主动控制及故障检测方法,步骤包括:
7.(1)设置帆板初始转动方向sdir为1,代表顺时针转动,控制方式smode为hold,即保持方式,控制计数器nscounter为0,记标定点火次数k初始值为1,若允许帆板主动控制,则循环进行步骤(2)~步骤(6);
8.(2)计算帆板目标转角;
9.(3)帆板转角测量跳变故障检测及处理;
10.(4)根据帆板目标转角和采集的帆板测量转角,计算帆板转角偏差值;
11.(5)根据转角偏差值,生成帆板分级驱动指令;
12.(6)若禁止帆板主动控制,则退出计算流程;否则返回步骤(2),k加1。
13.进一步的,步骤(2)中,所述计算帆板目标转角的方法为:
14.采集轨道坐标系下的太阳方向矢量[sox,soy,soz]和姿态转换矩阵c
bo
,计算本体坐标系下的太阳方向矢量:
[0015][0016]
若k=1,则帆板坐标系下的太阳方向矢量[ssadax,ssaday,ssadaz]为:
[0017]
ssadax=sbx;
[0018]
ssaday=sby;
[0019]
ssadaz=sbz;
[0020]
否则,进行矢量滤波计算,其中ksadac为滤波系数:
[0021]
ssadax=(1
‑
ksadac)*ssadax+ksadac*sbx;
[0022]
ssaday=(1
‑
ksadac)*ssaday+ksadac*sby;
[0023]
ssadaz=(1
‑
ksadac)*ssadaz+ksadac*sbz;
[0024]
计算帆板目标转角betab:
[0025]
betab=arctan2(
‑
ssadax,
‑
ssadaz)*180/3.14159265359;
[0026]
若(betab<0),则:
[0027]
betab=360+betab
[0028]
若|sb_saday|>0.9848,sb_saday为太阳方向单位矢量在与帆板转轴方向的投影,则:
[0029]
betab=βsada;
[0030]
其中,βsada为帆板转角计数器测量值。
[0031]
进一步的,步骤(3)中,所述帆板转角测量跳变故障检测及处理的方法为:
[0032]
根据卫星
‑
太阳矢量与卫星本体y轴的夹角阈值以及工作轨道范围,计算帆板转角在每个采数周期内的角度变化上限,以此给出帆板转角计数器测量的跳变阈值,超出此阈值的转角计数值认定为发生跳变。
[0033]
进一步的,
[0034]
若k=1,则:
[0035]
βsadalst=βsada,βsadalst为上一采样周期的帆板转角测量值,
[0036]
否则:
[0037]
若|βsada
‑
βsadalst|>1,则:
[0038]
设置故障标志ftsada=true;
[0039]
根据该帆板当前控制模式smode,按照一个控制周期的角度增量,重新配置转角计数值βsada:
[0040]
若smode=hold,则:
[0041]
βsada=βsadalst
[0042]
否则若smode=cruise,cruise含义为巡航方式,则:
[0043]
βsada=βsadalst+sdir*ts*0.0208;
[0044]
否则:
[0045]
βsada=βsadalst+sdir*ts*0.1;ts含义为帆板转角测量采样周期,
[0046]
βsadalst=βsada。
[0047]
进一步的,步骤(4)中,所述计算帆板转角偏差值ysada的方法为:
[0048]
ysada=betab+betabtc
–
βsada;
[0049]
其中,betabtc为帆板转角偏置量的偏移量,初值为0;
[0050]
若ysada>180,则:
[0051]
ysada=ysada
‑
360;
[0052]
否则,若ysada<
‑
180,则:
[0053]
ysada=ysada+360。
[0054]
进一步的,步骤(5)中,所述生成帆板分级驱动指令的方法为:
[0055]
根据转角偏差值设计帆板转角分级驱动指令,在帆板驱动机构电机能力范围内,满足帆板对日跟踪控制精度,同时确保平稳驱动。
[0056]
进一步的,若smode=cruise,则
[0057]
若sdir=0,则进行以下判断:
[0058]
若ysada>sclimit3,则设置为增量方式:
[0059]
smode=incr,incr含义为增量方式,
[0060]
nscounter=47,nscounter含义为帆板转角控制计数器,
[0061]
否则,若ysada<
‑
sclimit1,则设置为保持方式:
[0062]
smode=hold
[0063]
sdir=1
[0064]
若sdir=1,则进行以下判断:
[0065]
若ysada<
‑
sclimit3,则设置为增量方式:
[0066]
smode=incr
[0067]
nscounter=47
[0068]
否则,若ysada>sclimit1,则设置为保持方式:
[0069]
smode=hold
[0070]
sdir=0
[0071]
否则,若smode=hold,则判:
[0072]
若ysada>sclimit2,则从保持方式转到巡航方式:
[0073]
smode=cruise;
[0074]
sdir=0;
[0075]
若ysada<
‑
sclimit2,则从保持方式转到巡航方式:
[0076]
smode=cruise;
[0077]
sdir=1;
[0078]
否则
[0079]
若nscounter>0,则:
[0080]
nscounter=nscounter-1;
[0081]
否则:
[0082]
smode=cruise。
[0083]
其中,sdir=0代表sada转角增加,sdir=1代表sada转角减小;
[0084]
sclimit1、sclimit2、sclimit3为判断槛值,缺省取sclimit1=0.24;sclimit2=0.48;sclimit3=0.72。
[0085]
本发明与现有技术相比的有益效果是:
[0086]
(1)本发明自主完成帆板目标转角计算、sada转动故障检测,以及转角主动控制,具备异常工况下的故障检测能力,能够自主消除非常规工况和部分异常工况的转动偏差,适用于使用单轴帆板转动控制机构的各类卫星,创造性地解决了新一代卫星平台帆板转角
主动控制问题,完善了帆板转动非常规工况、异常工况的状态检测和自主处理能力;
[0087]
(2)本发明中帆板目标转角计算方法可适应太阳方向奇异工况,根据能源需求设计阈值,适时暂停更新帆板目标转角,避免了姿态大角度机动、电推变轨过程等工况下卫星
‑
太阳矢量与帆板转轴夹角过小时,导致的帆板转角变化速率过大的问题;
[0088]
(3)本发明具有转角计数跳变故障自主检测能力,根据帆板转角在每个周期内的角度变化上限,设计合理的帆板转角计数跳变检测阈值,并自主根据上一周期计数值和轨道动力学重新配置角度测量值,解决了转角计数跳变故障检测和处理问题;
[0089]
(4)本发明实现了基于转角偏差进行sada转动模式自主管理及分级控制,根据转角偏差值设计帆板转角分级驱动指令,在sada驱动能力范围内,满足帆板对日跟踪控制精度,同时尽量平稳驱动,减少了对帆板挠性振动的激励。
附图说明
[0090]
图1为本发明方法流程图。
具体实施方式
[0091]
下面结合实施例对本发明作进一步阐述。
[0092]
本发明提供一种面向能源安全的太阳帆板主动控制及故障检测方法,如图1所示,具体实施方式如下:
[0093]
(1)设置帆板初始转动方向sdir为1,控制方式smode为“hold”,控制计数器nscounter为0,记标定点火次数k初始值为1。若允许帆板主动控制,则循环进行步骤(2)~步骤(6):
[0094]
(2)计算帆板目标转角。
[0095]
(3)帆板转角测量跳变故障检测及处理。
[0096]
(4)根据帆板目标转角和采集的帆板测量转角,计算帆板转角偏差值。
[0097]
(5)根据转角偏差值,生成帆板分级驱动指令。
[0098]
(6)若禁止帆板主动控制,则退出计算流程;否则返回步骤(2),k加1。
[0099]
所述计算帆板目标转角的方法:
[0100]
采集轨道坐标系下的太阳方向矢量[sox,soy,soz]和姿态转换矩阵cbo,计算本体坐标系下的太阳方向矢量:
[0101][0102]
若k=1,则帆板坐标系下的太阳方向矢量[ssadax,ssaday,ssadaz]为:
[0103]
ssadax=sbx;
[0104]
ssaday=sby;
[0105]
ssadaz=sbz;
[0106]
否则,进行矢量滤波计算,其中ksadac为滤波系数:
[0107]
ssadax=(1
‑
ksadac)*ssadax+ksadac*sbx;
[0108]
ssaday=(1
‑
ksadac)*ssaday+ksadac*sby;
[0109]
ssadaz=(1
‑
ksadac)*ssadaz+ksadac*sbz;
[0110]
计算帆板目标转角betab:
[0111]
betab=arctan2(
‑
ssadax,
‑
ssadaz)*180/3.14159265359;
[0112]
若(betab<0),则:
[0113]
betab=360+betab
[0114]
若|sb_saday|>0.9848,则:
[0115]
betab=βsada;
[0116]
其中,βsada为帆板转角计数器测量值。
[0117]
所述帆板转角测量跳变故障检测及处理的方法:
[0118]
若k=1,则:
[0119]
βsadalst=βsada
[0120]
否则:
[0121]
若|βsada
‑
βsadalst|>1,则:
[0122]
设置故障标志ftsada=true;
[0123]
若smode=hold,则:
[0124]
βsada=βsadalst
[0125]
否则若smode=cruise,则:
[0126]
βsada=βsadalst+sdir*ts*0.0208;
[0127]
否则:
[0128]
βsada=βsadalst+sdir*ts*0.1;
[0129]
βsadalst=βsada。
[0130]
所述计算帆板转角偏差值的方法:
[0131]
ysada=betab+betabtc
‑
βsada;
[0132]
其中,betabtc为帆板转角偏置量的偏移量,初值为0。
[0133]
若ysada>180,则:
[0134]
ysada=ysada
‑
360;
[0135]
否则,若ysada<
‑
180,则:
[0136]
ysada=ysada+360。
[0137]
所述生成帆板分级驱动指令的方法:
[0138]
若smode=cruise,则
[0139]
若sdir=0,则进行以下判断:
[0140]
若(ysada>sclimit3),则设置为增量方式:
[0141]
smode=incr
[0142]
nscounter=47
[0143]
否则,若ysada<
‑
sclimit1,则设置为保持方式:
[0144]
smode=hold
[0145]
sdir=1
[0146]
若sdir=1,则进行以下判断:
[0147]
若(ysada<
‑
sclimit3),则设置为增量方式:
[0148]
smode=incr
[0149]
nscounter=47
[0150]
否则,若ysada>sclimit1,则设置为保持方式:
[0151]
smode=hold
[0152]
sdir=0
[0153]
否则,若(smode=hold),则判:
[0154]
若(ysada>sclimit2),则从保持方式转到巡航方式:
[0155]
smode=cruise;
[0156]
sdir=0;
[0157]
若(ysada<
‑
sclimit2),则从保持方式转到巡航方式:
[0158]
smode=cruise;
[0159]
sdir=1;
[0160]
否则
[0161]
若nscounter>0,则:
[0162]
nscounter=nscounter-1;
[0163]
否则:
[0164]
smode=cruise。
[0165]
说明:sdir=0代表sada转角增加,sdir=1代表sada转角减小。
[0166]
sclimit1、sclimit2、sclimit3为判断槛值,缺省取sclimit1=0.24;sclimit2=0.48;sclimit3=0.72。
[0167]
实施例
[0168]
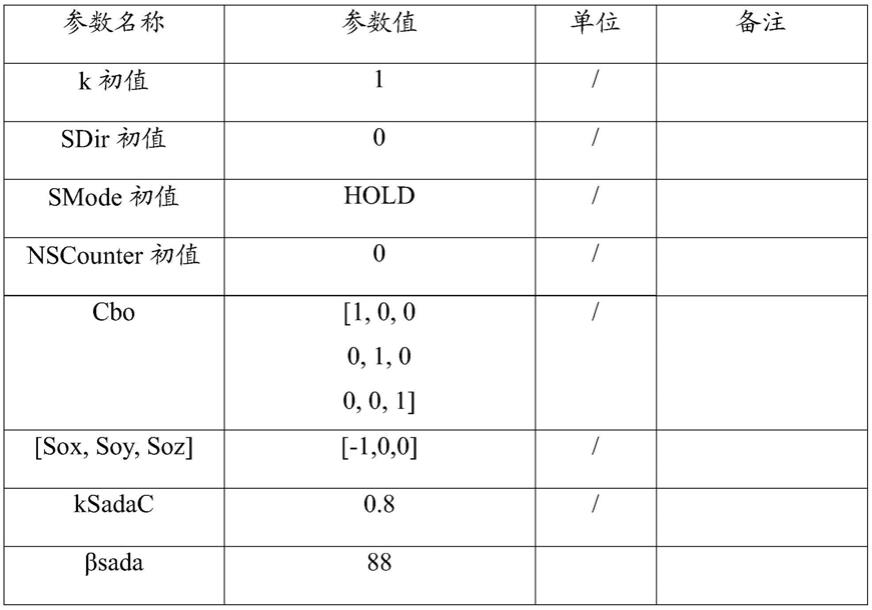
计算实施例设置的参数如表1:
[0169]
表1实施例设置参数
βsada88.0208度 βsadalst88.0208度 ftsadafalse/ ysada2度 smodeincr/ sdir0/ nscounter47/ [0176]
表4第3步计算结果
[0177][0178][0179]
表5第4步计算结果
[0180][0181]
本发明中帆板目标转角计算方法可适应太阳方向奇异工况,根据能源需求设计阈值,适时暂停更新帆板目标转角,避免了姿态大角度机动、电推变轨过程等工况下卫星
‑
太阳矢量与帆板转轴夹角过小时,导致的帆板转角变化速率过大的问题;
[0182]
本发明具有转角计数跳变故障自主检测能力,根据帆板转角在每个周期内的角度变化上限,设计合理的帆板转角计数跳变检测阈值,并自主根据上一周期计数值和轨道动力学重新配置角度测量值,解决了转角计数跳变故障检测和处理问题;
[0183]
本发明实现了基于转角偏差进行sada转动模式自主管理及分级控制,根据转角偏差值设计帆板转角分级驱动指令,在sada驱动能力范围内,满足帆板对日跟踪控制精度,同时尽量平稳驱动,减少了对帆板挠性振动的激励。
[0184]
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。