1.本发明属于油动无人机技术领域,具体涉及一种油动无人直升机动力机构。
背景技术:
2.无人机是无人操控飞机的简称,无人机根据其驱动方式的不同又将其划分为电动无人机和油动力无人机,而油动力无人直升机其抗风性能优异,机身工作时较为稳定且运用范围更为宽泛,特别是燃油动力无人直升机,其续航时间长,载重负荷高,具有广泛适应恶劣环境、性能稳定等优点,被广泛应用于农植保护、森林火灾监测、空中摄影、土地测量、灾后损失评估等任务。
3.直升机通过旋转的桨叶产生升力来平衡重量和飞行阻力,同时产生前后左右的操纵力,操纵系统用于控制直升机的姿态和航迹,改变直升机的运动状态,传统共轴无人直升机旋翼操纵系统包括舵机、连杆和倾斜盘等部件,主要采用大量杆系实现共轴直升机的操纵,包括垂直控制、方向控制、横向控制和纵向控制,该方式经过多年发展已日趋成熟,但仍存在诸多不足之处:
4.1.旋翼桨叶在旋转过程中因其复杂多变的工作与受力特点,稳定性较差,旋翼桨叶在旋转过程中,具有较大震幅,不利于飞机飞行过程保持平稳姿态,抗风阻、抗干扰能力差;
5.2.防扭臂及桨夹连杆设计不合理,导致防扭臂及桨夹连杆使用寿命短,且防扭臂传递力矩不足,影响飞行过程的动平衡性能;
6.3.油动力无人直升机的发动机动力需要分别传送到主轴和尾传动轴,传统的油动无人直升机的发动机动力需要通过主减速箱减速后直接输出至主轴和尾传动轴,这样使主减速箱设计的复杂程度大大增加,同时需要大量的齿轮作为传动部件,使整个传动系统结构复杂,成本高。
技术实现要素:
7.本发明要解决的技术问题是克服现有的缺陷,提供一种油动无人直升机动力机构,以解决上述背景技术中提出的问题。
8.一种油动无人直升机动力机构,其包括:
9.发动机、传动机构、尾旋翼,与传动机构连接的姿态调整机构,连接于姿态调整机构上方的上旋翼,其中,
10.传动机构包括机架以及安装于机架上的减速箱、侧传动组件;
11.姿态调整机构设置有与减速箱连接、用于带动主旋翼转动的主轴;
12.发动机的动力通过侧传动组件输出至尾旋翼并同步通过齿轮、轮轴机构输出至减速箱,由减速箱通过主轴传输至上旋翼。
13.进一步,所述侧传动组件包括:
14.与减速箱连接的第一主动带轮;
15.安装于机架上的侧传动轴;
16.与第一主动带轮通过同步带连接的、安装于侧传动轴一端的第一从动带轮;
17.安装于侧传动轴另一端、与第一从动带轮同步转动的第二主动带轮;
18.与第二主动带轮通过同步带连接的第二从动带轮;
19.连接于第二从动带轮的轮轴的尾传动轴;所述尾传动轴连接尾旋翼,由尾传动轴带动尾旋翼转动;
20.进一步,所述尾传动轴由低到高倾斜设置,尾传动轴与水面的夹角为2
‑6°
。
21.进一步,姿态调整机构包括主轴以及倾斜盘、舵机;
22.主轴上部连接上旋翼,所述上旋翼包括旋翼头以及安装于旋翼头上的三个桨夹组件;
23.倾斜盘包括转动连接的定盘与动盘;
24.定盘通过定盘连杆与舵机连接;动盘通过桨夹连杆与桨夹组件连接,动盘通过防扭臂与主轴连接;
25.相邻桨夹组件之间设置有桨夹连接毂,对应设置的三个桨夹连杆首端通过深沟球轴承与桨夹连接毂连接,末端通过关节轴承与动盘连接;
26.动盘上方的主轴上安装有固定台,固定台设置有用于连接防扭臂的三个挂耳,防扭臂首端通过深沟球轴承与固定台的挂耳连接,末端通过关节轴承与动盘连接;
27.桨夹连杆与防扭臂交错设置。
28.进一步,倾斜盘内部设置有关节轴承,由舵机驱动,带动上旋翼完成姿态调整动作。
29.进一步,防扭臂包括转动连接的两节连杆,通过两节连杆的弯曲角度的改变实现倾斜盘沿主轴的升降。
30.进一步,倾斜盘内部的主轴外圈设置有防尘罩。
31.进一步,桨夹连接毂上开设有凹槽,凹槽内设置有深沟球轴承与桨夹连杆连接。
32.进一步,上旋翼包括:
33.设置有用于连接旋转组件的三个挂耳的旋翼头;
34.通过安装轴连接于旋翼头挂耳的桨夹组件;
35.设置于安装轴与旋翼头的挂耳连接处的减震装置;
36.安装于减震装置上方的对减震装置起限位作用的限位装置。
37.进一步,所述减震装置为橡胶块。
38.与现有技术相比,本发明提供了一种油动无人直升机动力机构,具备以下有益效果:
39.1、本发明设计了尾旋翼侧传动的方式,将主减速箱输出的动力输出至主轴的同时,通过第一主动带轮、第一从动带轮、侧传动轴、第二主动带轮、第二从动带轮输出至尾传动轴,发动机输出的动力与尾传动轴的传动比,可以通过调整第一主动带轮、第一从动带轮、第二主动带轮、第二从动带轮的齿数来灵活调整;
40.2、侧传动轴的设计,不但起到良好的传动效果,而且延伸了传动距离,使尾传动轴的安装更加灵活自由,可以实现尾传动轴与机身保持一定的夹角,从而避免将尾旋翼系统的震动传递到机身结构。
41.3、本发明设计了带有三个桨夹组件的旋翼头,相邻桨夹组件之间通过桨夹连接毂,提高了稳定性;采用交错设置的三个桨夹连杆与防扭臂,并且三个桨夹连杆首端通过深沟球轴承与桨夹连接毂连接,末端通过关节轴承与动盘连接;防扭臂首端通过深沟球轴承与固定台的挂耳连接,末端通过关节轴承与动盘连接;使防扭臂及桨夹连杆受力均匀,提高了使用寿命;交错设置的三个桨夹连杆与防扭臂,增强了防扭臂的传递力矩能力,提高了无人机的动平衡性能;
42.4、本发明设计了带有减震的三桨叶旋翼结构,三桨叶通过桨夹组件连接于旋翼头的挂耳上并在桨夹组件的安装轴与旋翼头的挂耳连接处设置减震装置,并通过上方设置的限位装置对减震装置限位,三桨叶在旋转过程中因复杂的工作环境受到风阻等因素影响,产在的震动大部分被减震装置吸收,有利于飞机飞行过程保持平稳姿态,具有良好的抗风阻、抗干扰能力。
附图说明
43.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
44.在附图中:
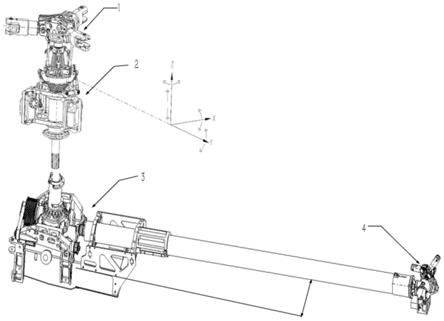
45.图1为本发明提出的一种油动无人直升机动力机构的示意图;
46.图2为本发明上旋翼和姿态调整机构的结构示意图;
47.图3是图2的局部结构放大示意图;
48.图4是传动机构局部结构放大示意图;
49.图5是上旋翼结构爆炸图。
50.图中:
51.上旋翼1;桨夹组件101;旋翼头102;减震装置103;限位装置104;第一锁紧杆105;第二锁紧杆106;第二轴孔107;第一轴孔108;安装轴109;
52.姿态调整机构2;防尘罩201;桨夹连接毂202;主轴203;固定台204;桨夹连杆205;倾斜盘206;定盘2061;动盘2062;防扭臂207;定盘连杆208;舵机209;
53.传动机构3;第一主动带轮301;第一从动带轮302;减速箱303;第二从动带轮304;第二主动带轮305;机架306;侧传动轴307;尾传动轴308;尾旋翼4。
54.尾旋翼4。
具体实施方式
55.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
56.参照图1
‑
图5,一种油动无人直升机动力机构,其包括发动机、传动机构3、尾旋翼4,与传动机构3连接的姿态调整机构2,连接于姿态调整机构2上方的上旋翼1,其中,传动机构3包括机架306以及安装于机架306上的减速箱303、侧传动组件;姿态调整机构2设置有与减速箱303连接、用于带动主旋翼转动的主轴203;发动机的动力通过侧传动组件输出至尾
旋翼4并同步通过齿轮、轮轴机构输出至减速箱303,由减速箱303通过主轴203传输至上旋翼1。
57.实施例1
58.侧传动组件包括与减速箱303连接的第一主动带轮301;减速箱303底盘固定于机架306上保持稳定,减速箱303的连接轴上设置大齿轮,发动机的动力通过大齿轮输出至减速箱3。减速箱303的动力输出至主轴203,用于带动主旋翼转动。减速箱303的连接轴上还连接第一主动带轮301;第一主动带轮301通过同步带连接第一从动带轮302;机架306上在减速箱3的一侧安装有侧传动轴307,第一从动带轮302安装于侧传动轴307的一端部,侧传动轴307另一端部安装有第二主动带轮5,第一从动带轮302与第二主动带轮305同步转动。第二从动带轮304与尾传动轴308均固定于机架306上,使整个传动装置保持良好的稳定性。
59.第二主动带轮305通过同步带连接第二从动带轮304,第二从动带轮304的轮轴连接尾传动轴308,尾传动轴8连接尾旋翼4,由尾传动轴8带动尾旋翼4转动。尾传动轴308优选的安装方式为由低到高倾斜设置,尾传动轴308与水面的夹角为可以设置为2
‑6°
,从而避免将尾旋翼系统的震动传递到机身结构。
60.实施例2
61.上旋翼1包括旋翼头102以及安装于旋翼头102上的三个桨夹组件101;倾斜盘206包括转动连接的定盘2061与动盘2062;定盘2061通过定盘连杆208与舵机209连接;动盘2062通过桨夹连杆5与桨夹组件101连接,动盘2062通过防扭臂207与主轴203连接;相邻桨夹组件101之间设置有桨夹连接毂202,对应设置的三个桨夹连杆205首端通过深沟球轴承与桨夹连接毂202连接,末端通过关节轴承与动盘2062连接。
62.动盘2062上方的主轴203上安装有固定台204,固定台204设置有用于连接防扭臂207的三个挂耳,防扭臂207首端通过深沟球轴承与固定台204的挂耳连接,末端通过关节轴承与动盘2062连接;桨夹连杆205与防扭臂207交错设置,增强了防扭臂的传递力矩能力,提高了无人机的动平衡性能;
63.倾斜盘206内部设置有关节轴承,倾斜盘206可由舵机209驱动,带动上旋翼1完成姿态调整动作。
64.防扭臂207包括转动连接的两节连杆,舵机209驱动倾斜盘206升降时,两节连杆的弯曲角度的改变,实现倾斜盘206沿主轴203的升降。
65.由于倾斜盘206会存在沿主轴203的升降动作,倾斜盘206内部的主轴203需涂覆润滑油,如果外露,润滑油会沾染大量灰尘,影响使用,因此,倾斜盘206内部的主轴203外圈设置有防尘罩201,用于保护主轴203,避免灰尘进入影响润滑性能。
66.桨夹连接毂202上开设有凹槽,凹槽内设置有深沟球轴承与桨夹连杆205连接。
67.实施例3
68.上旋翼101包括旋翼头102,所述翼头102设置有用于连接旋转组件的三个挂耳;挂耳用于连接桨夹组件101,桨夹组件101通过安装轴109连接于旋翼头102;安装轴109与旋翼头102的挂耳连接处设置有减震装置103;减震装置103上方安装限位装置104。所述减震装置103优选为可以发生弹性形变的橡胶块,遇到风阻等环境因素影响时,橡胶块在限位装置104的作用下发生弹性形变,可以很好地将震动吸收,提高飞行的平稳。旋翼头102的三个挂耳优选间隔120
°
均匀分布。飞行稳定性高、易于操控。
69.所述限位装置104中部开设有通孔,旋翼头102中部也开设有通孔,限位装置104与旋翼头102通过各自的通孔固定连接于一根主轴上。
70.桨夹组件1与旋翼头的安装方式如下,安装轴109上开设有第二轴孔107、第一轴孔108,旋翼头102的挂耳上设置有与第二轴孔107、第一轴孔108对应的安装孔,并设置第一锁紧杆105将安装在一起的第一轴孔108与对应的安装孔锁紧;设置第二锁紧杆106将安装在一起的第二轴孔107与对应的安装孔锁紧。
71.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。