1.本实用新型涉及一种无人机,具体是一种矢量推力控制的垂直起降固定翼无人机。
背景技术:
2.随着无人机技术的迅猛发展,其在高空拍照,远距离检测,勘探,物流运输以及边防巡逻等方面有非常广阔的应用。从技术类别上来讲,无人机可分为固定翼和多旋翼(直升机可归为多旋翼种类)两大类。多旋翼无人机最大的优势在于能够垂直起降,不受场地和空间的限制。然而多旋翼的短续航和低载重能力严重限制了其应用范围。相比于多旋翼无人机,固定翼无人机由于优异的机翼气动效率,能够实现超长续航和大载重。但是固定翼无人机需要一定的起降跑道和空间。这又限制了固定翼无人机的应用。多旋翼和固定翼的结合是同时解决起降场地限制,续航和载重问题的一种趋势。
3.目前市场上出现了多款多旋翼与固定翼结合的无人机型。第一种是采用旋转式电机驱动螺旋桨实现垂直起降,电机整体旋转90度实现巡航的无人机,这种无人机的缺点在于复杂的控制系统和转动整个电机的机械结构,大大增加了无人机的技术成本和安全隐患。第二种是采用多个固定式电机驱动螺旋桨实现垂直起降,然后通过另外一个在水平方向的电机驱动螺旋桨实现水平飞行。这种无人机的缺点在于巡航过程大部分的动力系统处于闲置状态,极大的增加了无效载荷和巡航阻力。其飞行效率和航程大幅降低。与此同时,垂直爬升阶段,机翼产生巨大阻力,严重限制其爬升速度。第三种是采用电机与螺旋桨置于机翼前方,整个无人机竖直90度实现垂直起降,再通过置于机身后面的控制面板实现巡航。这种无人机在垂直起降过程中由于螺旋桨产生的高速气流通过机身或者机舱从而产生阻力,直接降低有效载荷。在大风天的垂直降落工况下,机身倾斜,着陆很容易出现倾翻事故。这个问题导致该构型垂直起降无人机在大风天无法稳定降落到固定平台。严重限制了其实际应用。
4.现有技术存在如下问题:垂直起降固定翼无人机的爬升下降速度不够优良,且垂直起降过程中的高速螺旋桨气流通过整个机身或者机翼,致使有效载重降低。因此,本领域技术人员提供了一种矢量推力控制的垂直起降固定翼无人机,以解决上述背景技术中提出的问题。
技术实现要素:
5.本实用新型的目的在于提供一种矢量推力控制的垂直起降固定翼无人机,通过设置的矢量推力组件以及矢量尾推组件,能够同时提升垂直起降固定翼无人机的爬升下降速度,实现机身竖直降落,降低巡航阻力来增大航程,并且增大有效载荷,以解决上述背景技术中提出的问题。
6.为实现上述目的,本实用新型提供如下技术方案:
7.一种矢量推力控制的垂直起降固定翼无人机,包括主支架,所述主支架的外表面
中间位置固定连接有机翼连接件,且机翼连接件的两侧面分别固定连接有左机翼与右机翼;所述左机翼的侧面中间位置设有至少一个第一矢量推力组件;所述右机翼的侧面中间位置设有与第一矢量推力组件数量相同的第二矢量推力组件,且第二矢量推力组件与第一矢量推力组件相对主支架对称;所述主支架靠近第一矢量推力组件与第二矢量推力组件的一端活动连接有矢量尾推组件。
8.通过设置的矢量推力组件以及矢量尾推组件,能够同时提升垂直起降固定翼无人机的爬升下降速度,实现机身竖直降落,降低巡航阻力来增大航程,并且增大有效载荷。
9.作为本实用新型进一步的方案:所述第一矢量推力组件包括活动连接在左机翼侧面中间位置的左矢量电机,且左矢量电机的输出端固定连接有左螺旋桨。
10.左矢量电机与左螺旋桨的配合使用进一步提高左机翼的平衡。
11.作为本实用新型再进一步的方案:所述第一矢量推力组件包括活动连接在右机翼侧面中间位置的右矢量电机,且右矢量电机的输出端固定连接有右螺旋桨。
12.右矢量电机与右螺旋桨的配合使用进一步提高右机翼的平衡。
13.作为本实用新型再进一步的方案:所述矢量尾推组件包括活动连接在主支架一端的尾部矢量电机,且尾部矢量电机的输出端固定连接有尾部螺旋桨,所述尾部矢量电机一侧、主支架外侧面上固定连接有三角支撑架。
14.垂直起飞过程,利用三角支撑架竖直立于地面。通过左矢量电机与右矢量电机驱动的左螺旋桨与右螺旋桨旋转提供竖直方向的推力来实现垂直起飞,而尾部矢量电机驱动的螺旋桨此时通过调整推力方向,提供俯仰控制作用。
15.作为本实用新型再进一步的方案:所述机翼连接件靠近矢量尾推组件的一侧固定连接有控制器,且控制器电性连接左矢量电机、右矢量电机以及尾部矢量电机。
16.控制器用以控制左矢量电机、右矢量电机以及尾部矢量电机的运行状态。
17.作为本实用新型再进一步的方案:所述左机翼侧面靠近边沿的位置活动连接有左副翼,所述右机翼侧面靠近边沿的位置活动连接有右副翼。
18.左副翼与右副翼的配合使用用以调节左机翼与右机翼的平衡状态。
19.作为本实用新型再进一步的方案:还包括电池支架与两个电池,所述电池支架固定在主支架的另一端,所述两个电池对称固定连接在电池支架的两侧面。
20.通过两个独立运行的电池来大幅提升无人机安全性。
21.与现有技术相比,本实用新型的有益效果是:
22.1.本发明无需复杂的电机机械转动设计,大幅提升整机的安全可靠性。
23.2.通过螺旋桨垂直推力实现垂直起降功能。
24.3.应用矢量推力控制,方便进行俯仰、偏航和滚动三个通道的控制;轴向推力损失小、动态响应快和可提供较大的控制作用。实现快速起降。
25.4.螺旋桨位于机翼尾部,垂直起降过程的空气阻力将大幅减少从而增大有效载荷。
26.5.通过两组独立运行的电池系统来大幅提升飞行器安全性。
27.6.两套动力系统,可以分别根据悬停和巡航工况,进行优化配置。
附图说明
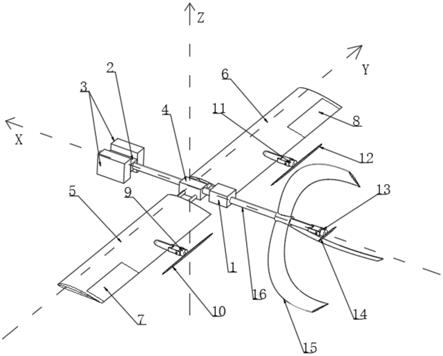
28.图1为一种矢量推力控制的垂直起降固定翼无人机的整体结构示意图;
29.图2为一种矢量推力控制的垂直起降固定翼无人机的垂直起降过程y轴示意图;
30.图3为一种矢量推力控制的垂直起降固定翼无人机的垂直起降过程z轴示意图;
31.图4为一种矢量推力控制的垂直起降固定翼无人机的巡航过程中y轴侧视示意图;
32.图5为一种矢量推力控制的垂直起降固定翼无人机的巡航过程中z轴俯视示意图。
33.图中:1、控制器;2、电池支架;3、电池;4、机翼连接件;5、左机翼;6、右机翼;7、左副翼;8、右副翼;9、左矢量电机;10、左螺旋桨;11、右矢量电机;12、右螺旋桨;13、尾部矢量电机;14、尾部螺旋桨;15、三角支撑架;16、主支架。
具体实施方式
34.请参阅图1~5,本实用新型实施例中,一种矢量推力控制的垂直起降固定翼无人机,包括主支架16,主支架16的外表面中间位置固定连接有机翼连接件4,且机翼连接件4的两侧面分别固定连接有左机翼5与右机翼6;左机翼5的侧面中间位置设有至少一个第一矢量推力组件;右机翼6的侧面中间位置设有与第一矢量推力组件数量相同的第二矢量推力组件,且第二矢量推力组件与第一矢量推力组件相对主支架16对称;主支架16靠近第一矢量推力组件与第二矢量推力组件的一端活动连接有矢量尾推组件。通过设置的矢量推力组件以及矢量尾推组件,能够同时提升垂直起降固定翼无人机的爬升下降速度,实现机身竖直降落,降低巡航阻力来增大航程,并且增大有效载荷。而该无人机整机采用碳纤维开模一体化制造,这样实现了结构简单而且强度大的特性,进一步提升安全性。
35.在图1中:第一矢量推力组件包括活动连接在左机翼5侧面中间位置的左矢量电机9,且左矢量电机9的输出端固定连接有左螺旋桨10。左矢量电机9与左螺旋桨10的配合使用进一步提高左机翼5的平衡。第一矢量推力组件包括活动连接在右机翼6侧面中间位置的右矢量电机11,且右矢量电机11的输出端固定连接有右螺旋桨12。右矢量电机11与右螺旋桨12的配合使用进一步提高右机翼6的平衡。机翼连接件4靠近矢量尾推组件的一侧固定连接有控制器1,且控制器1电性连接左矢量电机9、右矢量电机11以及尾部矢量电机13。控制器1用以控制左矢量电机9、右矢量电机11以及尾部矢量电机13的运行状态。左机翼5侧面靠近边沿的位置活动连接有左副翼7,右机翼6侧面靠近边沿的位置活动连接有右副翼8。左副翼7与右副翼8的配合使用用以调节左机翼5与右机翼6的平衡状态。该无人机还包括电池支架2与两个电池3,电池支架2固定在主支架16的另一端,两个电池3对称固定连接在电池支架2的两侧面。通过两个独立运行的电池3来大幅提升无人机安全性。
36.在图2中:矢量尾推组件包括活动连接在主支架16一端的尾部矢量电机13,且尾部矢量电机13的输出端固定连接有尾部螺旋桨14,尾部矢量电机13一侧、主支架16外侧面上固定连接有三角支撑架15。垂直起飞过程,利用三角支撑架15竖直立于地面。通过左矢量电机9与右矢量电机11驱动的左螺旋桨10与右螺旋桨12旋转提供竖直方向的推力来实现垂直起飞,而尾部矢量电机13驱动的尾部螺旋桨14此时通过调整推力方向,提供俯仰控制作用。
37.本实用新型的工作原理是:该矢量推力控制的垂直起降固定翼无人机在使用时分为几个阶段,具体如下:
38.垂直起飞过程,如图1所示,本发明利用三角支撑架15竖直立于地面。通过左矢量
电机9与右矢量电机11驱动的左螺旋桨10与右螺旋桨12旋转提供竖直方向的推力来实现垂直起飞,尾部矢量电机13驱动的尾部螺旋桨14此时通过调整推力方向,提供俯仰控制作用。左螺旋桨10与右螺旋桨12左右对称分布,转动方向相反,用于抵消整机在x轴的力矩和旋转。
39.竖直悬停过程,如图2所示,通过左副翼7与右副翼8绕y轴的同向转动来实现整机绕y轴的转动平衡。通过左矢量电机9与右矢量电机11驱动的左螺旋桨10与右螺旋桨12绕y轴的异向转动来实现整机绕x轴的转动平衡。通过左螺旋桨10与右螺旋桨12的推力差来实现绕z轴的转动平衡。整个过程中,矢量尾推组件通过调整尾部螺旋桨14推力方向辅助进行控制。整个平衡稳定过程通过控制器1来调节。
40.竖直悬停转换到水平巡航过程:通过尾部矢量电机13驱动尾部螺旋桨14,此时通过调整推力方向绕y轴正方向的大幅同向转动来实现整机绕y轴大幅转动来实现从竖直方向到水平方向的转换。
41.巡航过程,如图3和图4所示,左螺旋桨10与右螺旋桨12折叠,此时主要通过尾部矢量电机13驱动的尾部螺旋桨14推进;与此同时,通过尾部矢量电机13驱动的尾部螺旋桨14绕y轴的同向转动来实现整机绕y轴的转动平衡。通过左副翼7与右副翼8绕y轴的异向转动来实现整机绕x轴的转动平衡。整个平衡稳定过程通过控制器1来调节。
42.水平巡航转换到竖直悬停,通过尾部矢量电机13驱动的尾部螺旋桨14绕y轴反方向的大幅转动来实现整机绕y轴大幅转动来实现从水平方向到竖直方向的转换;此时,左螺旋桨10与右螺旋桨12由折叠变为展开,左矢量电机9与右矢量电机11驱动工作,提供悬停推力。
43.垂直降落过程,通过减少左螺旋桨10与右螺旋桨12在竖直方向的推力来实现垂直降落。在大风天工况下,通过左矢量电机9与右矢量电机11驱动的左螺旋桨10与右螺旋桨12绕y轴的同向转动,降低风带来的阻力,实现飞行器在竖直状态下定点垂直降落。
44.在本实施例中,电池3的型号为902530,左矢量电机9、右矢量电机11与尾部矢量电机13的型号均为et
‑
dcm35bl,控制器1的型号为s9s12g128f0mlh。
45.以上的,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。