1.本发明属于空投技术领域,涉及一种滑翔式远程精确空投装置。
背景技术:
2.在对一些远海岛礁、高原雪山等军事驻地的后勤补给以及对一些遭受地震、洪水等自然灾害的地区进行物资救灾等任务中,陆运及水运大多都无法实现,空投成了唯一的手段。对于一些内陆地区,可用直升机低空投放,从而保证一定的投放精度。但对于远距边境地区或远海所属岛礁,直升机已不可达,只能依靠固定翼飞机实现大航程。然而,在一些争议地区,目前的高空投送精度较低,不仅增加了我方地面人员获取物资的困难,更增加了物资落入敌方之手的风险。但如果采用低空投送,又增加了飞机被敌方射击的风险。
3.另一方面,对于一些远海地区,诸如南海,岛礁较为分散。传统的空投系统中,空投容器滑翔比较低,飞行的距离较近,因此必须逐岛依次投送,增大了飞机的任务航程,提高了任务成本。
4.因此,急需一种新的空投方式,可以从高空进行投放以规避被射击的风险,能够为传统的空投容器提高滑翔比以增加航程,从而可以实现从空中一点投放到多个目标地,还可以通过一定的控制手段提高着陆精度,保证物资安全。
技术实现要素:
5.本发明目的在于提供一套适用于传统的集装箱式的空投容器的、可增加其滑翔比与着陆精度的滑翔式远程精确空投组件。
6.一种滑翔式远程精确空投装置,包括:增程组件、整流组件、尾翼组件、缓冲组件;
7.所述增程组件固定在空投容器上方,所述增程组件用于提供滑翔升力及飞行控制;
8.所述整流组件固定在空投容器前端;
9.所述尾翼组件固定在空投容器后端;所述尾翼组件用于控制航向;
10.所述缓冲组件固定在空投容器下方,用于空投容器着陆缓冲。
11.进一步,所述增程组件包括:设置在增程组件壳体内的控制系统、导航系统、电气系统和固定在增程组件外壳上的折叠机翼;
12.所述控制系统用于机翼展开及尾翼组件的操纵;
13.所述导航系统用于定位导航;
14.所述电气系统用于为控制系统、导航系统、折叠机翼组件和尾翼组件供电。
15.进一步,所述折叠机翼包含直线导轨、丝杠、横梁、机翼、转轴、状态切换锁、同步块及电机模块;
16.所述横梁安装在直线导轨上且可沿直线导轨前后滑动;
17.所述丝杠的螺母与同步块固连,所述丝杠旋转带动同步块平行于直线导轨前后滑动;
18.所述机翼与横梁通过转轴连接;且同步块通过铰链与机翼连接;丝杠、同步块、转轴及机翼构成滑块连杆机构;
19.所述状态切换锁的锁体外壳安装在横梁下方,锁销及机簧安装在锁体外壳内;导轨中部位置处的增程组件壳体上设有锁销孔;
20.初始状态时,锁销顶在增程组件壳体上向上突起,将同步块与横梁锁定,且同步块与横梁均位于导轨前端,此时机翼折叠;
21.丝杠带动同步块运动至锁销孔时,锁销在机簧作用下插入锁销孔内,将横梁与增程组件壳体锁定;
22.丝杠带动同步块继续运动,同步块与横梁分离,且同步块通过滑块连杆机构带动机翼展开。
23.进一步,所述尾翼组件包括:尾整流罩、舵系统、平尾、垂尾、后缘舵、操纵连杆和旋转连杆;
24.所述尾整流罩与增程组件、空投容器和缓冲组件连接;
25.所述舵系统与增程组件的电气系统和控制系统连接;接受电气系统供电以及控制系统的控制信号;
26.所述舵系统在控制系统控制下通过旋转连杆带动垂尾及后缘舵在侧平面内旋转以将垂尾和后缘舵展开;初始状态时,垂尾与后缘舵向前折叠于投放容器两侧,可减小外廓尺寸以便于装载;展开状态时,垂尾与后缘舵向下展开,提供侧向气动操纵面;
27.所述舵舵系统还通过操纵连杆控制后缘舵偏转以控制航向。
28.进一步,所述整流组件包括:前整流罩和设置在前整流罩内的多个高压气瓶、电磁阀组、前向喷嘴和气管;
29.所述前整流罩与空头容器、增程组件及缓冲组件前端连接;
30.所述多个高压气瓶通过电磁阀组件及气管与前向喷嘴连接;
31.所述电磁阀组作为多个高压气瓶的供气开关,且与控制系统连接;
32.所述电磁阀组件在接收到控制系统的减速信号时,将高压气瓶与前向喷嘴连通;通过前向喷嘴反向喷气以减速。高压气瓶通过前向喷嘴高速喷出高压气体,给投放装置提供反向推力,使投放装置水平方向快速减速;减速过程中,控制系统根据速度反馈调整电磁阀组的控制信号,以控制电磁阀组开口大小,形成水平方向减速的闭环控制。
33.进一步,所述缓冲组件包括:设置在缓冲壳体下方的缓冲气囊;所述缓冲壳体用于收纳缓冲气囊;
34.所述缓冲气囊下方设有兜气孔;
35.当所述空投装置下落时通过所述兜气孔为缓冲气囊充气。
36.进一步,所述缓冲气囊还通过气管与电磁阀组件连接;当电磁阀组件在接收到控制系统的着陆信号时用高压气瓶内的高压气体为缓冲气囊充气。
37.进一步,所述缓冲组件还包括:下向喷嘴;
38.所述下向喷嘴还通过气管与电磁阀组件连接;
39.当电磁阀组件在接收到控制系统的减速信号时将下向喷嘴与高压气瓶接通,通过下向喷嘴喷气以在竖直方向内减速。
40.有益效果
41.1)空投组件通用性好,可拓展普通的空投集装箱的能力;
42.2)空投滑翔距离远,可在较远距离空投物资,避免载机遭受打击;
43.3)滑翔与着陆过程可精确控制,确保着陆精度,使飞机可高空向多个目标区投放物资,避免风险,降低成本;
44.4)高压气体反推替代了传统的伞降减速回收,减小了着陆过程中环境风的影响,提高了可操纵性,避免了在杂乱的伞中获取物资的麻烦。
附图说明
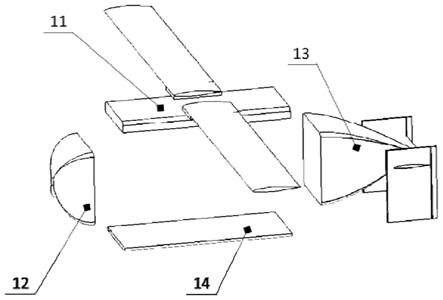
45.图1为滑翔式远程精确空投组件示意图;
46.图2为增程组件示意图;
47.图3为机翼展开状态示意图;
48.图4为状态切换锁机翼折叠状态剖视图;
49.图5为状态切换锁机翼展开状态剖视图;
50.图6为尾翼组件示意图;
51.图7为尾翼组件旋转示意图;
52.图8为整流组件与缓冲组件示意图;
53.图9为空投组件与集装箱安装示意图;
54.图10为反推减速过程工作示意图;
55.图11为反推着陆过程工作示意图;
56.11
‑
增程组件,12
‑
整流组件,13
‑
尾翼组件,14
‑
缓冲组件,2
‑
空投集装箱;
57.111
‑
控制系统,112
‑
导航系统,113
‑
折叠机翼,114
‑
电气系统;
58.11
‑
增程组件,1131
‑
直线导轨,1132
‑
丝杠,1133
‑
横梁,1134
‑
机翼,1135
‑
转轴,1136
‑
状态切换锁,1137
‑
同步块,1138
‑
电机模块;
59.11361
‑
锁销,11362
‑
机簧,11363
‑
锁体外壳;
60.131
‑
尾整流罩,132
‑
舵系统,133
‑
平尾,134
‑
垂尾,135
‑
后缘舵,136
‑
操纵连杆,137
‑
旋转连杆;
61.121
‑
高压气瓶,122
‑
电磁阀组,123
‑
前向喷嘴,141
‑
缓冲气囊,142
‑
下向喷嘴。
具体实施方式
62.本发明主要提供一型滑翔式远程精确空投组件,主要包括增程组件11、整流组件12、尾翼组件13、缓冲组件14,如图1所示。
63.其中,增程组件11提供滑翔升力以及飞行控制,主要有控制系统111、导航系统112、折叠机翼113以及电气系统114组成,如图2所示。
64.折叠机翼113主要包含直线导轨1131、丝杠1132、横梁1133、机翼1134、转轴1135、状态切换锁1136、同步块1137及电机模块1138等,如图3所示。状态切换锁1136主要包含锁销11361、机簧11362及锁体外壳11364,如图4所示。其中,机翼1134与横梁1133通过转轴1135连接;横梁1133安装在直线导轨1131上,可沿直线导轨1131前后滑动;丝杠1132的螺母与同步块1137固连,丝杠1132旋转可带动同步块1137前后平移滑动;同步块1137相对于横梁1133前后滑动可带动机翼1134折叠、展开;状态切换锁1136的锁体外壳11363安装在横梁
1133下方,锁销11361及机簧11362安装在锁体外壳11363内。初始状态时,机翼1134折叠,折叠模块整体位于增程组件11前端,此时状态切换锁1136的锁销11361上部插入同步块1137内,锁紧同步块1137与横梁1133,此时丝杠1132旋转带动同步块1137和横梁1133同时作平移;当横梁1133与同步块1137向后平移一定距离至指定位置时,在该位置处增程组件11上方开有锁销孔,锁销11361在机簧11362的作用下向下移动下方插入增程组件11壳体的锁销孔内,锁紧横梁1133与增程组件11机身,同时上方退出同步块1137的锁孔,此时丝杠1132旋转带动同步块1137相对于横梁1133向后移动,带动机翼1134展开。
65.尾翼组件13主要包括尾整流罩131、舵系统132、平尾133、垂尾134、后缘舵135、操纵连杆136与旋转连杆137等。尾翼组件13通过尾整流罩131与投放容器2、增程组件11及缓冲组件14连接,舵系统132与增程组件11中控制系统111电气连通,接收控制信号。舵系统132通过旋转连杆137可以控制垂尾134连同后缘舵135实现在侧平面内旋转(如图7所示),通过操纵连杆136可以控制后缘舵135实现舵偏。
66.整流组件12与缓冲组件14主要安装有减速与缓冲装置,包括高压气瓶121、电磁阀组122、前向喷嘴123、下向喷嘴142、缓冲气囊141及气管等,如图8所示。四个高压气瓶121贮存减速用高压气源,减速时控制系统111发出指令,控制电磁阀组122通断,分别控制前向喷嘴123与下向喷嘴142向外喷出高压气体,产生反向推力实现减速。
67.增程组件11通过快卸搭扣安装在集装箱2的上方,缓冲组件14安装在集装箱2的下方,整流组件12与尾翼组件13分别安装在首尾两端,侧面与集装箱2连接,上下两边分别与增程组件11与缓冲组件14连接。
68.工作原理:
69.空投组件安装至集装箱2上,初始状态如图10所示,增程组件11中的机翼114折叠并列于背部,尾翼组件13中的垂尾134连同后缘舵135收于集装箱2的两侧,并保持此种状态在运输飞机中进行堆叠装载。
70.在投放前,机组人员向控制系统111装订投送目的地的位置信息等参数,并激活电气系统114。离机后,增程组件11中的控制系统111首先控制尾翼组件13中的舵系统132,驱动旋转连杆136向下旋转垂尾134连同后缘舵135。姿态平稳后,控制系统111控制机翼113展开,同时后移,为滑翔提供较大升阻比。滑翔过程中,导航系统112实时向控制系统111发送自身位置信息,控制系统111根据实时位置与目标位置不断调整飞行控制指令,修正空投组件连同集装箱2的飞行轨迹。到达距目标地一定距离后,控制系统111控制整流组件12中的电磁阀组122中的电爆阀起动,高压气瓶121开始向外供气,并通过电磁阀组122控制高压气体通过前向喷嘴123与下向喷嘴142向外喷出,形成反推力,使空投组件与集装箱2快速减速,如图10所示。控制系统根据目标地位置与自身位置及高度,通过电磁阀组122控制出气方向与出气量,以较高精度瞄准目标地着陆。
71.航向速度减为0m/s后,机翼113与垂尾134连同后缘舵135收回至原始状态,并通过下向喷嘴142反推喷气,控制空投组件与集装箱2缓慢垂直下降,到达一定高度后,缓冲组件中的缓冲气囊141充气打开,直至空投组件及集装箱2触地,如图11所示。
72.本发明特点:
73.1)该空投组件包含增程组件11、整流组件12、尾翼组件13及缓冲组件14;
74.2)该空投组件为模块化设计,可快速组装,通用常规的空投集装箱;
75.3)该空投组件可实现机翼折叠与尾翼旋转,节省装载空间,提高装载数量;
76.4)该空投组件中增程组件展弦比大,可实现远距离滑翔;
77.5)该空投组件具有卫星导航与飞行控制能力,可实现精确位置控制;
78.6)该空投组件采用高压气体反推代替常规降落伞减速,提高减速可操控性,从而提高着陆精度,同时避免了降落伞着陆后杂乱覆盖空投物资的麻烦。