1.本实用新型涉及桥梁检技术领域,具体涉及用于桥梁检测的无人机与多传感器融合定位机构。
背景技术:
2.随着无人机技术的发展,无人机广泛用于各种工程技术领域,在桥梁检测中也逐渐采用了无人机技术,特别是飞爬两栖机器人,飞爬两栖机器人具有飞行、爬行和栖息三种状态,并能够实现三种状态下的切换。目前主要采用人工远程遥控的方式对桥梁进行检测,存在操作难度高、效率低、容易漏检的缺点。另外,桥梁结构存在如梯形、弧形等异性区域,并非完全的平整区域。如果无人机完全按照二维平面上规划出的巡航路径,容易与桥梁表面发生碰撞、无法顺利驻停,甚至坠机等安全事故,导致桥梁检测无法正常进行。
3.鉴于此,申请人设计了一种用于桥梁检测的三维巡航方法,在空间三维坐标系中规划出三维巡航路径,然后根据三维巡航路径解算无人机的巡航姿态,巡航路径中包含若干路径点,每个路径点均有对应的巡航姿态,无人机上搭载gps定位模块,在巡航过程中实时获取定位坐标,若定位坐标与路径点坐标一致则以该路径点对应的巡航姿态进行运动,从而能够到达下一相邻路径点,最终能够完成沿着整个巡航路径进行巡航检测。但是,由于在对桥梁结构底面或箱梁内部(桥梁上有检修孔供无人机进入,箱梁的形状规则,多为矩形体)等位置进行检测时,会造成gps定位模块接收的卫星信号不稳定或失效的现象,进而使得定位坐标与实际位置坐标不相符,定位的准确性低,定位偏差大。
4.所以,申请人想到在现有无人机上集成通讯模块、gps定位模块、惯性传感器、图像传感器和超声测距传感器等多种传感器,使得能够采集多种传感器的多种定位数据,并能够实现多种定位数据的收发,以供后台通过一种、两种或多种传感器融合定位的方式来修正定位数据,从而提高定位精度。然而,想要实现上述多种定位数据的采集和收发,其首要解决的技术问题是如何设计一种能够有效集成上述各种传感器的无人机与多传感器融合定位机构的结构设计方案,使其产品能够尽可能小型化,更便于在桥梁结构底面或箱梁内部等狭小空间移动,才能更好的满足桥梁检测场景下对检测安全性的需求。因此,申请人设计了一种能够实现多种定位数据采集和收发且集成化程度高的无人机与多传感器融合定位机构。
技术实现要素:
5.针对上述现有技术的不足,本实用新型所要解决的技术问题是:如何提供一种能够实现多种定位数据采集和收发且集成化程度高的无人机与多传感器融合定位机构,从而能够实现融合定位机构的小型化,并能够满足桥梁检测的检测安全性。
6.为了解决上述技术问题,本实用新型采用了如下的技术方案:
7.用于桥梁检测的无人机与多传感器融合定位机构,包括机身,以及固定设置于所述机身上的机翼;所述机身包括壳体;所述壳体内部具有用于安装通讯模块、gps定位模块
和惯性传感器的安装腔;所述壳体的表面上设置有用于安装超声测距传感器且与所述安装腔连通的安装窗口;所述壳体顶部设置有用于安装图像传感器的支撑柱;所述通讯模块、所述gps定位模块和所述惯性传感器均安装于所述安装腔内;所述超声测距传感器安装于所述安装窗口内且其测量端朝外设置;所述图像传感器安装于所述支撑柱顶部;所述gps定位模块、所述惯性传感器、所述图像传感器和所述超声测距传感器的信号输出端分别与所述通讯模块的数据接收端数据通信连接。
8.优选的,所述通讯模块设置于所述安装腔内的一侧,所述gps定位模块和所述惯性传感器间隔设置于所述安装腔内远离所述通讯模块的一侧。
9.优选的,所述壳体底部对应所述通讯模块的位置设有若干个与所述安装腔连通的散热孔。
10.优选的,所述壳体前侧、后侧、左侧、右侧、上侧和下侧的表面分别设置有与所述安装腔连通的安装窗口,所述前侧、后侧、左侧、右侧、上侧和下侧上的安装窗口内分别安装有所述超声测距传感器。
11.优选的,所述壳体顶部对称设置有两根支撑柱,且两根支撑柱上分别安装有所述图像传感器。
12.优选的,所述支撑柱的内部具有沿轴线贯通设置且与所述安装腔连通的线槽,使得所述图像传感器的线缆能够设置于所述线槽内。
13.本实用新型中的融合定位机构与现有技术相比,具有如下有益效果:
14.1、本实用新型中,通过无人机机身的壳体集中安装了通讯模块、gps定位模块、惯性传感器、图像传感器和超声测距传感器,使得能够实现上述多种传感器的定位数据采集和收发,进而能够通过两种或多种传感器融合定位的方式来修正定位数据,从而能够有效的辅助提高定位精度。
15.2、本实用新型中,将通讯模块、gps定位模块和惯性传感器安装于安装腔内,有利于对各个部件进行保护;将超声测距传感器设置于安装窗口内且测量端朝外设置,有利于更好的采集超声定位数据;将图像传感器安装于支撑柱顶部,有利于更好的采集图像定位数据,即能够实现定位数据的准确采集。
16.3、本实用新型中,将各个传感器和模块集中设置于无人机机身的壳体上,使得各个传感器和模块能够很好的实现与无人机的融合,进而使得融合定位机构的集成化程度更高,从而能够实现融合定位机构的小型化,并能够满足桥梁检测的检测安全性。
附图说明
17.为了使实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型作进一步的详细描述,其中:
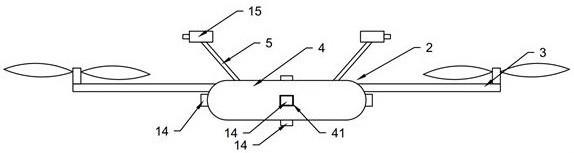
18.图1为实施例中融合定位机构的结构示意图;
19.图2为实施例中融合定位机构的正视剖视图。
20.说明书附图中的附图标记包括:通讯模块11、gps定位模块12、惯性传感器13、图像传感器14、超声测距传感器15、机身2、机翼3、壳体4、安装窗口41、散热孔42、支撑柱5、线槽51。
具体实施方式
21.下面通过具体实施方式进一步详细的说明:
22.实施例:
23.本实施例中公开了一种用于桥梁检测的无人机与多传感器融合定位机构。
24.如图1和图2所示,用于桥梁检测的无人机与多传感器融合定位机构,包括机身2,以及固定设置于机身2上的机翼3;机身2包括壳体4;壳体4内部具有用于安装通讯模块11、gps定位模块12和惯性传感器13的安装腔;壳体4的表面上设置有用于安装超声测距传感器15且与安装腔连通的安装窗口41;壳体4顶部设置有用于安装图像传感器14的支撑柱5;通讯模块11、gps定位模块12和惯性传感器13均安装于安装腔内;超声测距传感器15安装于安装窗口41内且其测量端朝外设置;图像传感器14安装于支撑柱5顶部;gps定位模块12、惯性传感器13、图像传感器14和超声测距传感器15的信号输出端分别与通讯模块11的数据接收端数据通信连接。本实施例中,通讯模块11为现有的微处理器;gps定位模块12、惯性传感器13和超声测距传感器15均为现有技术中成熟使用的传感器,其与微处理器的连接方式已非常现有;图像传感器14为现有的摄像机,其通过有线的方式与微处理器通信。
25.本实用新型中,通过无人机机身2的壳体4集中安装了通讯模块11、gps定位模块12、惯性传感器13、图像传感器14和超声测距传感器15,使得能够实现上述多种传感器的定位数据采集和收发,进而能够通过两种或多种传感器融合定位的方式来修正定位数据,从而能够有效的辅助提高定位精度。其次,将通讯模块11、gps定位模块12和惯性传感器13安装于安装腔内,有利于对各个部件进行保护;将超声测距传感器15设置于安装窗口41内且测量端朝外设置,有利于更好的采集超声定位数据;将图像传感器14安装于支撑柱5顶部,有利于更好的采集图像定位数据,即能够实现定位数据的准确采集。此外,将各个传感器和模块集中设置于无人机机身2的壳体4上,使得各个传感器和模块能够很好的实现与无人机的融合,进而使得融合定位机构的集成化程度更高,从而能够实现融合定位机构的小型化,并能够满足桥梁检测的检测安全性。
26.具体实施过程中,通讯模块11设置于安装腔内的一侧,gps定位模块12和惯性传感器13间隔设置于安装腔内远离通讯模块11的一侧。实际检测时,通讯模块11在工作过程中很容易发热、发烫,所以,本实用新型将gps定位模块12和惯性传感器13与通讯模块11远离、间隔设置,从而避免gps定位模块12和惯性传感器13的工作受到干扰。
27.具体实施过程中,壳体4底部对应通讯模块11的位置设有若干个与安装腔连通的散热孔42。本实用新型中,在壳体4底部对应通讯模块11的位置设置了散热孔42,使得通讯模块11产生的热量能够更快的散发,从而能够避免通讯模块11更多的发热,并能够保证gps定位模块12和惯性传感器13的工作稳定性。
28.具体实施过程中,壳体4前侧、后侧、左侧、右侧、上侧和下侧的表面分别设置有与安装腔连通的安装窗口41,前侧、后侧、左侧、右侧、上侧和下侧上的安装窗口41内分别安装有超声测距传感器15。本实用新型中,在机身2的前侧、后侧、左侧、右侧、上侧和下侧分别设置了超声测距传感器15,即能够采集和收发无人机机身2六个方位的超声定位数据,有利于更好的辅助实现融合定位并能够修正定位数据。
29.具体实施过程中,壳体4顶部对称设置有两根支撑柱5,且两根支撑柱5上分别安装有图像传感器14。本实用新型中,设置了两个图像传感器14,即能够在无人机移动过程中,
通过两个图像传感器14连续观测桥梁结构,从而能够利用多视角集合和图像特征提取计算实现定位。
30.具体实施过程中,支撑柱5的内部具有沿轴线贯通设置且与安装腔连通的线槽51,使得图像传感器14的线缆能够设置于线槽51内。
31.实际检测时,由于图像传感器14需要通过有线的方式传输数据且距离通讯模块11较远,导致图像传感器14线缆的布置成了难题。所以,本实用新型在支撑柱5的内部设置了线槽51,使得图像传感器14的线缆能够设置于线槽51内,这不仅能够保护图像传感器14的线缆,还能够避免线缆在无人机移动过程中影响机翼3或其他部件的工作。
32.以上所述的仅是本实用新型的实施例,方案中公知的具体结构及特性等常识在此未作过多描述,所属领域普通技术人员知晓申请日或者优先权日之前实用新型所属技术领域所有的普通技术知识,能够获知该领域中所有的现有技术,并且具有应用该日期之前常规实验手段的能力,所属领域普通技术人员可以在本技术给出的启示下,结合自身能力完善并实施本方案,一些典型的公知结构或者公知方法不应当成为所属领域普通技术人员实施本技术的障碍。应当指出,对于本领域的技术人员来说,在不脱离本实用新型结构的前提下,还可以作出若干变形和改进,这些也应该视为本实用新型的保护范围,这些都不会影响本实用新型实施的效果和专利的实用性。本技术要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。