1.本发明涉及航空技术领域,特别涉及一种旋翼矢量变向装置及共轴旋翼、单桨直升机及控制方法。
背景技术:
2.近十几年来,随着复合材料、动力系统、传感器、尤其是飞行控制等技术的研究进展,无人直升机得到了迅速的发展,正日益成为人们关注的焦点;在无人直升飞机领域,直升无人机成为一种飞行器界的新物种;目前的直升无人机通过斜盘操控桨叶的周期性和总体性的俯仰角,来控制飞行器的飞行状态。为配合这种控制方案,直升无人机的旋翼系统上需要很多的连杆,铰链,在这种直升无人机的控制上需要根据结构,调整桨盘的相位角。影响相位角的因素比较多,所以很难得出具体的相位角数值,需要多次调整结构到合适的相位角。
技术实现要素:
3.本发明的目的是为了克服上述问题,提供一种旋翼矢量变向装置及共轴旋翼、单桨直升机及控制方法。
4.为达到上述目的,本发明采用的方法是:提供一种旋翼矢量变向装置,包括动力机构,滑动倾转旋翼组件,倾转斜盘组件,倾转驱动组件,中轴固定组件;所述的滑动倾转旋翼组件包括上翘板桨夹,下翘板桨夹,滑轮支架,倾转滑轮,桨毂,推进旋翼;所述的上翘板桨夹的中间位置与桨毂的一端铰接,所述的上翘板桨夹的两端分别与两个滑轮支架的一端铰接;所述的两个滑轮支架的另一端分别与下翘板桨夹的两端铰接;所述的下翘板桨夹中间位置与桨毂的另一端铰接;所述的两个滑轮支架底部铰接安装两个倾转滑轮;所述的上翘板桨夹两端都固定安装有推进旋翼;所述的中轴固定组件包括中心连接轴以及与中心连接轴连接的动力驱动器底座,所述的桨毂套设在所述的中心连接轴上,所述动力机构设置在动力驱动器底座,动力机构与桨毂(25)连接,用于驱动所述的桨毂旋转;所述的倾转斜盘组件包括倾转滑盘以及驱动连杆组件,所述的驱动连杆组件与倾转驱动组件连接,倾转驱动组件通过驱动连杆组件带动倾转滑盘倾转;所述的倾转滑盘的一侧端面与所述的倾转滑轮相抵触,所述的倾转滑盘倾转时,倾转滑轮在旋翼旋转时在倾转滑盘上滚动。
5.作为本发明的优选,所述的倾转斜盘组件还包括关节轴承,所述的关节轴承安装在所述倾转滑盘的中心位置,且所述的关节轴承套设在所述的中心连接轴上。
6.作为本发明的优选,所述的倾转驱动组件包括前驱动舵机,左驱动舵机,左驱动力臂,前驱动力臂;驱动连杆组件包括左驱动连杆以及前驱动连杆;所述的前驱动连杆一端与倾转滑盘一侧铰接,左驱动连杆的一端与倾转滑盘另一侧铰接;所述的左驱动连杆的另一
端与左驱动力臂的一端铰接;所述的前驱动连杆的另一端与前驱动力臂铰接;所述的左驱动力臂的另一端与左驱动舵机的扭力输出轴固连;所述的前驱动力臂的另一端与前驱动舵机的扭力输出轴固连。
7.作为本发明的优选,在所述的中心连接轴远离动力驱动器底座的一端设置有驱动器安装底座,所述的前驱动舵机与左驱动舵机分别安装在所述的驱动器安装底座的不同位置,前驱动力臂与左驱动力臂点位的连线与中心连接轴的轴线不相交。
8.作为本发明的优选,所述的倾转斜盘组件还包括用于限制倾转滑盘的方位角度斜盘方位限制器。
9.作为本发明的优选,所述的斜盘方位限制器包括双连杆结构,双连杆一端与所述的倾转滑盘的一侧铰接,另一端与驱动器安装底座的铰接。
10.作为本发明的优选,所述的动力机构为直驱电机,包括定子和转子;所述动力机构的定子与动力驱动器底座固定安装;所述动力机构的转子与桨毂固定连接。
11.本发明还公开了一种矢量共轴旋翼直升机,包括机身以及设置在机身上的旋翼组件,所述的旋翼组件包括两层旋翼矢量变向装置,所述的旋翼矢量变向装置为上述的旋翼矢量变向装置,两层旋翼矢量变向装置的结构为上下对称分布。
12.作为本发明的优选,两个的旋翼矢量变向装置的中心连接轴之间为一体式结构或者分体式结构;两个的旋翼矢量变向装置上的前驱动舵机,左驱动舵机为共用的结构或者单独使用的结构。
13.本发明还公开了上述矢量共轴旋翼直升机的控制方法,包括以下步骤:两个的旋翼矢量变向装置的推进旋翼反向转动平衡旋翼的反扭距;倾转倾转滑盘使旋转的旋翼桨盘倾斜控制矢量共轴旋翼直升机的横滚和俯仰;通过增加和减少旋翼转速来控制飞行器的升降。
14.通过倾转倾转滑盘使旋转的旋翼桨盘倾斜控制飞行器的横滚和俯仰,通过增加和减少旋翼转速来控制飞行器的升降。
15.本发明还公开了一种矢量旋翼单桨直升机,包括旋翼矢量变向装置、尾桨动力系统以及机身;所述的旋翼矢量变向装置安装在机身上方,尾桨动力系统安装在机身尾部,所述的旋翼矢量变向装置为上述的旋翼矢量变向装置。
16.本发明还公开一种矢量旋翼单桨直升机的控制方法,包括以下步骤:矢量旋翼单桨直升机的尾桨动力系统平衡所述的矢量变向装置的推进旋翼所产生的反扭距;通过倾转倾转滑盘使旋转的旋翼桨盘倾斜控制飞行器的横滚和俯仰,通过增加和减少旋翼转速来控制飞行器的升降。
17.有益效果:本发明通过倾转驱动组件带动倾转滑盘倾转,从而可以使得滑动倾转旋翼组件的旋翼倾斜,从而实现飞行器的运动控制,相比于传统的矢量旋翼装置为动力机构与旋翼一同倾斜的系统,操纵机构可以直接对旋翼的桨盘进行倾斜操控,能够减轻操控其旋翼方向的操纵机构的负担。由于整体方案上通过简化结构,使传动结构更加可靠,其制造成本更少,并且相比于普通单桨直升机的旋翼机构,本旋翼机构的机动性更强,响应更快,效率更高,其控制方法更加简单。
附图说明
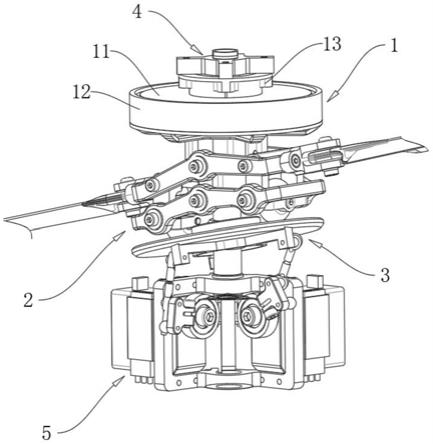
18.图1为本发明的装置组件结构标识图;图2为本发明的装置结构标识图;图3为本发明的滑动倾转旋翼组件结构示意图;图4为本发明的中轴固定组件结构示意图;图5为本发明的斜盘限制器结构示意图;图6为本发明的动力机构的结构示意图;图7为本发明实施例2的结构示意图;图8为本发明实施例4的结构示意图。
具体实施方式
19.下面结合附图和具体实施例,进一步阐明本发明,本实施例在以本发明技术方案为前提下进行实施,应理解这些实施例仅用于说明本发明而不用于限制本发明的范围。
20.实施例1:如图1
‑
6所示,本实施例公开的一种旋翼矢量变向装置,包括动力机构1,滑动倾转旋翼组件2,倾转斜盘组件3,倾转驱动组件5以及中轴固定组件4。
21.滑动倾转旋翼组件2包括上翘板桨夹21、下翘板桨夹22、滑轮支架23、倾转滑轮24、桨毂25和推进旋翼26。上翘板桨夹21的中间位置与桨毂25的一端铰接,上翘板桨夹21的两端分别与两个滑轮支架23的一端铰接。两个滑轮支架23的另一端分别与下翘板桨夹22的两端铰接。下翘板桨夹22中间位置与桨毂25的另一端铰接;所述的两个滑轮支架23底部铰接安装两个倾转滑轮24;所述的上翘板桨夹21两端都固定安装有推进旋翼26。
22.所述的中轴固定组件4包括中心连接轴42、与中心连接轴42一端连接的动力驱动器底座41以及与中心连接轴42另一端连接的驱动器安装底座43。桨毂25套设在中心连接轴42上,动力机构1设置在动力驱动器底座41上,动力机构1与桨毂25连接,用于驱动桨毂25旋转。
23.在本实施例中,动力机构1为直驱电机,包括定子11和转子12,动力机构1的定子11通过定子安装座13与动力驱动器底座41固定安装;动力机构1的转子12与桨毂25固定连接。这样,动力机构1的转子12转动就可以带动桨毂25一起转动,进而可以带动整个滑动倾转旋翼组件2转动。
24.驱动器安装底座43上安装有倾转驱动组件5,倾转驱动组件5包括前驱动舵机51、左驱动舵机52、左驱动力臂53以及前驱动力臂54。前驱动舵机51与前驱动力臂54连接,输出前驱动力矩,左驱动舵机52与左驱动力臂53连接输出左驱动力矩。
25.倾转斜盘组件3包括关节轴承31、倾转滑盘32、前驱动连杆33、左驱动连杆34以及斜盘方位限制器35。关节轴承31安装在倾转滑盘32的中心位置,且关节轴承31套设在中心连接轴42上。前驱动连杆33一端与倾转滑盘32一侧铰接,左驱动连杆34的一端与倾转滑盘32另一侧铰接;左驱动连杆34的另一端与左驱动力臂53的一端铰接;前驱动连杆33的另一端与前驱动力臂54铰接。所述的左驱动力臂53的另一端与左驱动舵机52的扭力输出轴固连;所述的前驱动力臂54的另一端与前驱动舵机51的扭力输出轴固连。这样,前驱动舵机51通过前驱动力臂54、前驱动连杆33可以带动倾转滑盘32倾转。左驱动舵机52通过左驱动力
臂53、左驱动连杆34可以带动倾转滑盘32倾转。本实施例中,前驱动力臂54与左驱动力臂53点位的连线与中心连接轴42的轴线不相交。这样就能保证倾转滑盘32倾转时,能够在不同的方位进行倾转。
26.本实施例中,斜盘方位限制器35为双连杆结构,其一端与所述的倾转滑盘32的一侧铰接,另一端与驱动器安装底座43的外侧铰接。斜盘方位限制器35两端的铰接位置可以围绕其铰接位置的轴相对转动,允许倾转滑盘32倾转运动,并以限制倾转滑盘32的周向方位角度。
27.本实施例的工作原理为:动力机构1的转子12转动,带动桨毂25转动,进而可以带动与桨毂25铰接的上翘板桨夹21、下翘板桨夹22转动,进而可以带动与上翘板桨夹21连接的推进旋翼26转动。并且上翘板桨夹21、下翘板桨夹22转动可以带动滑轮支架23以及滑轮24转动。当需要对推进旋翼的方向进行调整时,通过倾转驱动组件5的前驱动舵机51以及左驱动舵机52动作,前驱动舵机51通过前驱动力臂54、前驱动连杆33带动倾转滑盘32倾转,左驱动舵机52通过左驱动力臂53、左驱动连杆34带动倾转滑盘32倾转,从而实现倾转滑盘32的不同的角度方位的倾转。
28.所述的倾转滑盘32倾转时,倾转滑轮24在旋翼旋转时在倾转滑盘32上滚动,带动滑动倾转旋翼组件2在旋转过程中随着倾转滑盘32的倾斜改变桨盘升力方向。
29.实施例2:本实施例公开了一种矢量共轴旋翼直升机,如图7所示,包括机身6以及设置在机身6上的旋翼组件,旋翼组件包括上下两层旋翼矢量变向装置,旋翼矢量变向装置为实施例1中的旋翼矢量变向装置,两层旋翼矢量变向装置的结构为上下对称分布。
30.本实施例的矢量共轴旋翼直升机的控制方法,包括以下步骤:两个的旋翼矢量变向装置的动力机构1驱动上下两层推进旋翼26反向转动平衡旋翼的反扭距;倾转驱动组件5驱动倾转滑盘32倾转,倾转倾转滑盘32使旋转的旋翼桨盘倾斜控制矢量共轴旋翼直升机的横滚和俯仰;动力机构1增加或减少推进旋翼26的转速来控制矢量共轴旋翼直升机的升降。
31.实施例3:本实施例公开了一种矢量共轴旋翼直升机,本实施例其余都与实施例2相同,不同的是,为了减轻旋翼组件的重量以及体积,进一步地节约成本,本实施例中,将上下两层旋翼矢量变向装置共用前驱动舵机51和左驱动舵机52,也就是一个前驱动舵机51和一个左驱动舵机52既驱动上层旋翼矢量变向装置中的倾转滑盘32倾转,也驱动下层旋翼矢量变向装置中的倾转滑盘32倾转。
32.本实施例中的矢量共轴旋翼直升机的控制方法与实施例2的矢量共轴旋翼直升机的控制方法相同。
33.实施例4:参照图8,本实施例公开了一种矢量旋翼单桨直升机,包括旋翼矢量变向装置、尾桨动力系统7以及机身6;旋翼矢量变向装置安装在机身6上方,尾桨动力系统7安装在机身6尾部,旋翼矢量变向装置实施例1中的旋翼矢量变向装置。
34.本实施例的矢量旋翼单桨直升机的控制方法如下:
矢量旋翼单桨直升机的尾桨动力系统平衡矢量变向装置的推进旋翼26所产生的反扭距;倾转驱动组件5驱动倾转滑盘32倾转,倾转倾转滑盘32使旋转的旋翼桨盘倾斜控制矢量旋翼单桨直升机的横滚和俯仰;动力机构1增加或减少推进旋翼26的转速来控制矢量旋翼单桨直升机的升降。
35.本发明方案所公开的技术手段不仅限于上述技术手段所公开的技术手段,还包括由以上技术特征任意组合所组成的技术方案。以上所述是本发明的具体实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本发明的保护范围。