1.本实用新型涉及轮式机器人技术领域,具体地说是一种四轮独立驱动式可独立转向的减震机器人底盘。
背景技术:
2.机器人的终极理想形态是像人或者像动物一样,能够到达任何的地方完全代替人类的工作,目前这一领域做的最好的公司是美国的波士顿机器人,但是也存在成本过高,不成熟等问题,还没有真正推向工业化。轮式机器人是目前人工智能机器人产品的主要形式,成本底,容易控制,是目前巡检、巡逻、配送等机器人的主要行走载体。
3.对于轮式机器人而言,底盘是整个系统的重要支撑部件,用于支撑安装轮轮毂、悬挂部件、电控制系统、定位部件、音频等部件的总成以及承受电机动力,能够保证轮式机器人的正常行驶。而机器人底盘的灵活性直接影响着机器人的使用场合。对于一些比较复杂、狭窄的地方,机器人无法通过,直接限制了机器人的应用。这个问题是机器人及人工智能发展的主要瓶颈。
4.目前研制的四驱独转的底盘多是无减震或者有减震但结构复杂制造成本较高,整机重量高;且转向角度受限,面对恶劣地面条件不能有效的减震。
技术实现要素:
5.本实用新型的技术任务是针对以上不足之处,提供一种四轮独立驱动式可独立转向的减震机器人底盘,能够实现轮毂独立转向,且实现有效减震,结构简单、重量轻,可以应对更加复杂的路况。
6.本实用新型解决其技术问题所采用的技术方案是:
7.一种四轮独立驱动式可独立转向的减震机器人底盘,包括底盘骨架本体和分别安装于底盘骨架本体四个角处的四个独立转向轮毂机构,
8.所述独立转向轮毂机构包括固定座、驱动装置、传动组件、转动轴、支架、减震组件和轮毂组件;独立转向轮毂机构通过固定座与底盘骨架本体固定,驱动装置通过传动组件连接转动轴,所述传动轴与支架上端固定连接,支架的下部通过轮毂固定座连接有轮毂;
9.所述支架的内侧安装有竖直设置的减震弹簧,所述减震弹簧顶部与支架铰接固定,底部与所述轮毂固定座铰接固定;
10.所述支架的下部与毂固定座采用平行四边形连杆机构实现活动连接。
11.驱动装置通过传动组件将转向力传递到转动轴,转动轴带动支架实现转向,从而实现轮毂的360
°
转向,四个独立转向轮毂机构实现四个轮毂的独立转向控制;
12.减震装置通过平行四边形连杆机构与支架及轮毂连接,保证轮毂的运行姿态,保证运输安全。该减震机构的设计能够增加底盘的地面适应能力,有效应对凹凸不平的地面。
13.通过以上结构能够实现较小半径的转弯、原地转动以及横向运动,通过性和灵活性较强,满足轮式机器人的要求。
14.优选的,驱动装置具有动力输出轴,传动组件包括主动从动轮、从动皮带轮和转向同步带,所述动力输出轴连接主动从动轮,并通过转向同步带连接从动皮带轮,从动皮带轮与所述转动轴固定连接。
15.优选的,所述驱动装置为舵机,通过控制舵机角度来控制轮毂的旋转角度。
16.优选的,所述固定座内设置有轴承座,转动轴通过交叉滚子轴承与所述固定座连接;固定座下部设置有固定盘,固定盘上开设有连接孔,所述固定盘与底盘骨架本体通过螺栓连接固定。
17.交叉滚子轴承既能承受径向力还能承受足够大的轴向力,为整机重量起到支撑作用。
18.进一步的,所述固定座还设置有承托部,承托部上方通过支撑座固定驱动装置,通过支撑轴及轴承固定主动从动轮。
19.优选的,还设置有皮带张紧装置,包括张紧调节轴、轴向固定螺钉和皮带张紧螺钉,张紧调节轴通过轴向固定螺钉定位并通过轴承连接主动从动轮,皮带张紧螺钉水平设置且一端与张紧调节轴固定;
20.所述支撑座通过水平开设的长孔与固定座可调式连接。
21.同步带的张紧通过皮带张紧螺钉提供,轴向固定螺钉提供张紧调节轴的轴向力;同步带的张紧方便,可实现不用拆卸其他零部件即可实现张紧。
22.优选的,所述支架具有倾斜设置的过渡斜面,支架与转动轴的连接处至支架与减震弹簧顶部连接处、支架与减震弹簧顶部连接处至支架作为连杆机构的竖直段之间均为过渡斜面。各过渡面之间形成钝角,有利于力的传递和结构的支撑稳定性。
23.优选的,所述四杆机构由两个平行设置的连杆、支架和轮毂固定座的可转动连接而形成;两个连杆的一端通过塞打螺钉与所述支架连接,另一端通过对锁螺栓分别与轮毂固定座、轮毂固定座及减震弹簧连接;轮毂固定座上端开设有铰接座,轮毂固定座上部与减震弹簧底部通过所述对锁螺栓实现铰接。
24.优选的,所述对锁螺栓通过塑料轴承固定。塑料轴承能够提高铰链的耐磨性、减轻重量、降低成本。
25.优选的,所述转动轴的轴心竖直开设有出线过孔,轮毂电机出线线缆沿支架内侧固定并向上穿过所述出线过孔,在传动组件上方出线。该设计,轮毂电机出线线缆无需走线滑环即可实现360
°
转向。
26.本实用新型的一种四轮独立驱动式可独立转向的减震机器人底盘与现有技术相比,具有以下有益效果:
27.四个独立转向轮毂机构模块化设计,安装拆卸方便,四个独立转向轮毂机构可实现四个轮毂的独立360
°
转向,及有效减震;轮毂减震机构采用平行四边形铰链式连杆机构,能够保证轮胎的姿态,使得不管减震器处于何种状态,轮毂都会和车身底盘保持垂直的状态,从而使车身在遇到凹凸不平的地面时也能保证姿态的不变,保证运送货物的安全。
28.该减震机器人底盘能够应用于产品设计行业,降低产品设计门槛、降低产品开发周期、提高产品设计效率,具备一定的应用前景。
附图说明
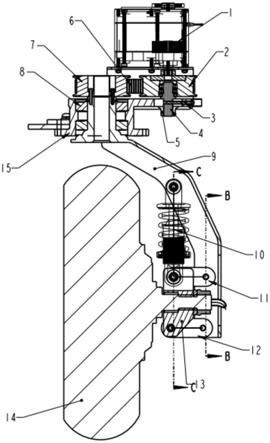
29.图1是本实用新型实施例提供的独立转向轮毂机构的结构组成剖视示意图;
30.图2是图1中b-b方向的剖视图;
31.图3是图1中c-c方向的剖视图;
32.图4是独立转向轮毂机构的整体效果图;
33.图5是实用新型实施例提供的四轮独立驱动式可独立转向的减震机器人底盘整体效果图;
34.图6是减震器处于拉伸状态的独立转向轮毂机构效果图;
35.图7是减震器处于收缩状态的独立转向轮毂机构效果图。
36.图中,1、舵机,2、主动从动轮,3、皮带张紧螺钉,4、张紧调节轴,5、轴向固定螺钉,6、转向同步带,7、从动皮带轮,8、交叉滚子轴承,9、支架,10、弹簧阻尼器,11、上摆臂,12、下摆臂,13、轮毂固定座、14、轮毂及轮毂组件,15、固定座,16、对锁螺栓,17、塑料轴承,18、塞打螺钉,19、轮毂电机出线线缆,20、底盘骨架本体。
具体实施方式
37.下面结合具体实施例对本实用新型作进一步说明。
38.一种四轮独立驱动式可独立转向的减震机器人底盘,包括底盘骨架本体20和分别安装于底盘骨架本体20四个角处的四个独立转向轮毂机构。
39.所述独立转向轮毂机构包括固定座15、驱动装置、传动组件、转动轴、支架、减震组件和轮毂组件,独立转向轮毂机构通过固定座15与底盘骨架本体20固定,驱动装置通过传动组件连接转动轴,所述传动轴与支架9上端固定连接,支架9的下部通过轮毂固定座13连接有轮毂及轮毂组件14。
40.本实施例中,所述驱动装置为舵机1,通过控制舵机1的角度来控制轮毂的旋转角度。舵机1具有动力输出轴,传动组件包括主动从动轮2、从动皮带轮7和转向同步带6,所述动力输出轴连接主动从动轮2,并通过转向同步带6连接从动皮带轮7,从动皮带轮7与所述转动轴固定连接,即与支架9的上端形成固定连接。
41.参考图1所示,该传动组件设置有皮带张紧装置,包括张紧调节轴4、轴向固定螺钉5和皮带张紧螺钉3,张紧调节轴4通过轴向固定螺钉5定位并通过轴承连接主动从动轮2,皮带张紧螺钉3水平设置且一端与张紧调节轴4固定,通过调节皮带张紧螺钉3实现张紧调节轴4的水平移动,从而实现主动从动轮2与从动皮带轮7的间距调节,进而实现转向同步带6的张紧调节。同步带的张紧通过皮带张紧螺钉3提供,轴向固定螺钉5提供张紧调节轴的轴向力;同步带的张紧方便,可实现不用拆卸其他零部件即可实现张紧。
42.所述固定座15内设置有轴承座,转动轴通过交叉滚子轴承8与所述固定座15连接;固定座15下部设置有固定盘,固定盘上开设有连接孔,所述固定盘与底盘骨架本体20通过螺栓连接固定。交叉滚子轴承8既能承受径向力还能承受足够大的轴向力,为整机重量起到支撑作用。
43.转动轴与支架9可以是一体式结构,及支架9的上端以转动轴的结构形式参与连接与传动,实现支架9的转动。
44.固定座15还设置有承托部,承托部上方通过支撑座固定驱动装置,通过张紧调节
轴4及轴承固定主动从动轮。固定座15上张紧调节轴4的过孔为长孔,以便于张紧调节轴4的水平向移动。所述支撑座通过水平开设的长孔及螺栓实现与固定座15的可调式连接。
45.所述支架9的内侧安装有竖直设置的弹簧阻尼器10,所述弹簧阻尼器10的顶部与支架9铰接固定,底部与所述轮毂固定座13铰接固定。
46.支架9的下部与毂固定座13采用平行四边形连杆机构实现活动连接。
47.所述四杆机构由两个平行设置的连杆(上摆臂11和下摆臂12)、支架9和轮毂固定座13的可转动连接而形成。如图2所示,上摆臂11和下摆臂12的一端通过塞打螺钉18与所述支架9连接,另一端通过对锁螺栓16分别与轮毂固定座13、轮毂固定座13及弹簧阻尼器10连接,如图3所示,轮毂固定座13上端开设有铰接座,轮毂固定座13上部与弹簧阻尼器10底部通过所述对锁螺栓16实现铰接。所述对锁螺栓16通过塑料轴承17固定,塑料轴承17能够减轻机器人重量的同时提高关节处的耐磨性。
48.如图1所示,所述支架9具有倾斜设置的过渡斜面,支架9与转动轴的连接处至支架9与弹簧阻尼器10顶部连接处、支架9与弹簧阻尼器10顶部连接处至支架9作为连杆机构的竖直段之间均为过渡斜面。各过渡面之间形成钝角,有利于力的传递和结构的支撑稳定性。
49.舵机1通过传动组件将转向力传递到支架9从而实现支架9的转向,进而实现支架9带动轮毂14的360
°
转向,四个独立转向轮毂机构实现四个轮毂14的独立转向控制。从而使整机实现原地转向、横向行走、纵向行走和阿克曼转向形式的行走。
50.所述转动轴的轴心竖直开设有出线过孔,轮毂电机出线线缆19沿支架9内侧固定并向上穿过所述出线过孔,在传动组件上方出线。该设计,轮毂电机出线线缆19无需走线滑环即可实现360
°
转向。
51.弹簧阻尼器10通过平行四边形连杆机构与支架9及轮毂14连接,保证轮毂的运行姿态,保证运输安全。该减震机构的设计能够增加底盘的地面适应能力,有效应对凹凸不平的地面。
52.通过以上结构能够实现较小半径的转弯、原地转动以及横向运动,通过性和灵活性较强,满足轮式机器人的要求。
53.上文通过附图和优选实施例对本实用新型进行了详细展示和说明,然而本实用新型不限于这些已揭示的实施例,基与上述多个实施例本领域技术人员可以知晓,可以组合上述不同实施例中的代码审核手段得到本实用新型更多的实施例,这些实施例也在本实用新型的保护范围之内。