1.本发明涉及汽车控制技术领域,尤其是涉及一种汽车主动悬架智能自动调节系统及其控制方法。
背景技术:
2.现有技术中,普通车型一般采用固定弹簧刚度及固定减震器阻尼技术;高级车型采用半主动悬架技术;豪华车型才会采用主动悬架技术。
3.现有技术基本都是重心附近安装有纵向、横向加速度和横摆陀螺仪传感器,用来采集车身振动、车轮跳动、车身高度和倾斜状态等信号,这些信号被输入到控制单元,控制单元根据输入信号和预先设定的程序发出控制指令,控制伺服电机并操纵前后执行油缸工作。
4.但是,现有技术中对汽车的控制策略相对单一,无法全面的分析汽车行驶时处于何种路况,无法根据具体路况信息对应给油缸发出指令,进而对悬架系统进行调节。
技术实现要素:
5.本发明的目的在于提供一种汽车主动悬架智能自动调节系统及其控制方法,以缓解了现有技术中存在的对汽车的控制策略相对单一,无法全面的分析汽车行驶时处于何种路况,无法根据具体路况信息对应给油缸发出指令,进而对悬架系统进行调节的技术问题。
6.第一方面,本发明提供的汽车主动悬架智能自动调节系统,包括:传感器组件、电子控制单元、自动变速箱控制模块、防抱死制动系统、车身电子稳定系统、主动悬架控制单元和主动悬架系统;
7.所述传感器组件与所述电子控制单元、自动变速箱控制模块、防抱死制动系统、车身电子稳定系统和主动悬架控制单元电连接;
8.所述传感器组件被用于采集移动汽车的速度、距离并提供横向、纵向加速度值,以得到运动数据信息;
9.所述主动悬架控制单元配置为能够根据所述传感器组件采集到的所述运动数据信息计算得出汽车的运动状态和装载状态,并根据数据库中的路谱信息对应计算出汽车行驶的路况;
10.所述主动悬架控制单元与所述主动悬架系统电连接,所述主动悬架系统配置为能够接收来自所述主动悬架控制单元检测到的路况信息,并根据所述路况信息对应调整弹簧刚度和减震器阻尼力。
11.在可选的实施方式中,所述传感器组件包括方向盘转角传感器、轮速传感器和加速度传感器;
12.所述方向盘转角传感器、所述轮速传感器、所述加速度传感器均与所述主动悬架控制单元电连接;
13.所述方向盘传感器设置于转向管柱上,所述方向盘传感器用于采集转向管柱的转
动角度,并将转动角度信息传递至所述主动悬架控制单元中;
14.所述加速度传感器与油门踏板连接,所述加速度传感器用于采集油门踏板的开度信息,并将油门踏板开度信息传递至所述主动悬架控制单元中;
15.所述轮速传感器安装于汽车车架上,所述轮速传感器用于采集车速信息,并将车速信息传递至所述主动悬架控制单元中。
16.在可选的实施方式中,所述主动悬架控制单元包括前左减震执行器、前右减震执行器、后左减震执行器和后右减震执行器;
17.所述前左减震执行器、前右减震执行器、后左减震执行器和后右减震执行器均与所述主动悬架控制单元电连接,所述主动悬架控制单元配置为能够根据所述运动数据信息生成减震控制信号,并将所述减震控制信号传递至所述前左减震执行器、前右减震执行器、后左减震执行器和后右减震执行器中。
18.在可选的实施方式中,所述主动悬架系统还包括渐进式弹簧;
19.所述渐进式弹簧安装在车架与车轮之间,所述渐进式弹簧的两端圈径尺寸小于所述渐进式弹簧的中部圈径尺寸。
20.第二方面,本发明提供的基于汽车主动悬架智能自动调节系统的控制方法,包括以下步骤:
21.抗后坐步骤:通过传感器组件检测油门踏板移动速度和位移,当传感器组件检测到汽车处于急起步加速状态时,电子控制单元通过执行器增加减震器阻尼力,且调整渐进式弹簧,以使渐进式弹簧能够抵抗汽车起步时产生的车速后坐力。
22.在可选的实施方式中,包括以下步骤:
23.抗侧倾步骤:通过方向盘转角传感器检测方向盘的转动角度,方向盘转角传感器检测到汽车处于急转弯状态时,主动悬架控制单元通过执行器加大内轮减震器阻尼力和弹簧刚度,减小外轮减震器阻尼力和弹簧刚度,以抵抗车身侧倾。
24.在可选的实施方式中,还包括以下步骤:
25.当轮速传感器检测到车速高于60km/h且紧急制动时,主动悬架控制单元通过执行器增加前轮弹簧刚度和前轮减震器阻尼力,减少后轮弹簧刚度和后轮减震器阻尼力,以对抗车身前部的下倾力。
26.在可选的实施方式中,还包括以下步骤:
27.当轮速传感器检测到车速大于110km/h时,主动悬架控制单元通过执行器将弹簧刚度和减振器阻尼力调至中间值。
28.在可选的实施方式中,还包括以下步骤:
29.当轮速传感器检测到车速在30~80km/h内,且前轮车高传感器检测出路面有第一凸起时,主动悬架控制单元通过执行器减少弹簧刚度和减震器阻尼力。
30.在可选的实施方式中,还包括以下步骤:
31.当轮速传感器检测到车速在40~100km/h内,且前轮车高传感器检测出路面有第二凸起时,主动悬架控制单元通过执行器将弹簧刚度和减震器阻尼力调至中间值。
32.本发明提供的汽车主动悬架智能自动调节系统,包括:传感器组件、电子控制单元、自动变速箱控制模块、防抱死制动系统、车身电子稳定系统、主动悬架控制单元和主动悬架系统;通过传感器组件,采集移动汽车的速度、距离并提供横向、纵向加速度值,同时与
整车电子控制单元、自动变速箱控制模块、防抱死制动系统和车身电子稳定系统相互通讯,通过主动悬架控制单元,计算得出汽车处于起步、急加速、急减速、急转弯、横摆跳动、空载、半载、满载等路况,同时通过主动悬架控制单元数据库中的路谱对比分析,计算出汽车正处于高速、越野、城市、乡村等具体路况,从而给油缸发出指令,对主动悬架系统进行调节,整套控制系统智能、可靠、全面,缓解了现有技术中存在的对汽车的控制策略相对单一,无法全面的分析汽车行驶时处于何种路况,无法根据具体路况信息对应给油缸发出指令,进而对悬架系统进行调节的技术问题。
附图说明
33.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
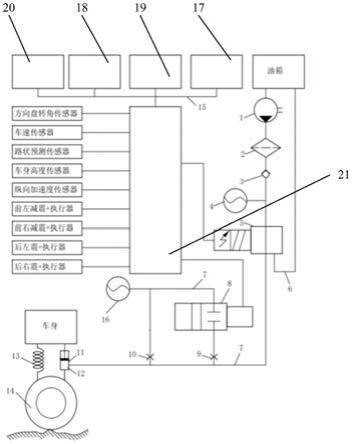
34.图1为本发明实施例提供的汽车主动悬架智能自动调节系统的整体结构框图;
35.图2为本发明实施例提供的汽车主动悬架智能自动调节系统中渐进式弹簧的结构示意图;
36.图3为本发明实施例提供的汽车主动悬架智能自动调节系统中渐进式弹簧弹性系数和减震器阻尼系数在不同车况下的图表。
37.图标:1-油泵;2-滤清器;3-单向阀;4-第一储能器;5-控制阀;6-回油管;7-油管;8-选择阀;9-副节流阀;10-主节流阀;11-油压腔;12-液压执行器;13-悬架弹簧;14-车轮;15-通讯总线;16-第二储能器;17-电子控制单元;18-自动变速箱控制模块;19-防抱死制动系统;20-车身电子稳定系统;21-主动悬架控制单元。
具体实施方式
38.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
39.因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
40.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
41.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”等仅用于区分描述,而不能理
解为指示或暗示相对重要性。
42.此外,术语“水平”、“竖直”、“悬垂”等术语并不表示要求部件绝对水平或悬垂,而是可以稍微倾斜。如“水平”仅仅是指其方向相对“竖直”而言更加水平,并不是表示该结构一定要完全水平,而是可以稍微倾斜。
43.在本发明的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
44.下面结合附图,对本发明的一些实施方式作详细说明。在不冲突的情况下,下述的实施例及实施例中的特征可以相互组合。
45.如图1所示,本实施例提供的汽车主动悬架智能自动调节系统,包括:传感器组件、电子控制单元17、自动变速箱控制模块18、防抱死制动系统19、车身电子稳定系统20、主动悬架控制单元21和主动悬架系统;传感器组件与电子控制单元17、自动变速箱控制模块18、防抱死制动系统19、车身电子稳定系统20和主动悬架控制单元21电连接;传感器组件被用于采集移动汽车的速度、距离并提供横向、纵向加速度值,以得到运动数据信息;主动悬架控制单元21配置为能够根据传感器组件采集到的运动数据信息计算得出汽车的运动状态和装载状态,并根据数据库中的路谱信息对应计算出汽车行驶的路况;主动悬架控制单元21与主动悬架系统电连接,主动悬架系统配置为能够接收来自主动悬架控制单元21检测到的路况信息,并根据路况信息对应调整弹簧刚度和减震器阻尼力。
46.具体的,主动悬架系统包括油泵1、滤清器2、单向阀3、第一储能器4、控制阀5、回油管76、油管7、选择阀8、副节流阀9、主节流阀10、油压腔11、液压执行器12和悬架弹簧13组成,油泵1的一端连接汽车油箱,油泵1的另一端通过油管7依次连接有滤清器2、单向阀3、第一储能器4和控制阀5,控制阀5与主动悬架控制单元21电连接,主动悬架控制单元21根据传感器组件检测到的汽车运动数据信息生成控制信号,控制信号传递到控制阀5中,进而控制液油的流动,通过控制阀5控制的液油可通过回油管76进入到油箱中,也可进入到选择阀8中,选择阀8可将液油流入到第二储能器16中,也可将液油流入到液压腔中,通过液压执行器12作用在车轮14上。
47.另外,电子控制单元17、自动变速箱控制模块18、防抱死制动系统19、车身电子稳定系统20、主动悬架控制单元21之间通过通讯总线15实现信号的传递。
48.本实施例提供的汽车主动悬架智能自动调节系统,包括:传感器组件、电子控制单元17、自动变速箱控制模块18、防抱死制动系统19、车身电子稳定系统20、主动悬架控制单元21和主动悬架系统;通过传感器组件,采集移动汽车的速度、距离并提供横向、纵向加速度值,同时与整车电子控制单元17、自动变速箱控制模块18、防抱死制动系统19和车身电子稳定系统20相互通讯,通过主动悬架控制单元21,计算得出汽车处于起步、急加速、急减速、急转弯、横摆跳动、空载、半载、满载等路况,同时通过主动悬架控制单元21数据库中的路谱对比分析,计算出汽车正处于高速、越野、城市、乡村等具体路况,从而给油缸发出指令,对主动悬架系统进行调节,整套控制系统智能、可靠、全面,缓解了现有技术中存在的对汽车的控制策略相对单一,无法全面的分析汽车行驶时处于何种路况,无法根据具体路况信息
对应给油缸发出指令,进而对悬架系统进行调节的技术问题。
49.在可选的实施方式中,传感器组件包括方向盘转角传感器、轮速传感器和加速度传感器;方向盘转角传感器、轮速传感器、加速度传感器均与主动悬架控制单元21电连接;方向盘传感器设置于转向管柱上,方向盘传感器用于采集转向管柱的转动角度,并将转动角度信息传递至主动悬架控制单元21中;加速度传感器与油门踏板连接,加速度传感器用于采集油门踏板的开度信息,并将油门踏板开度信息传递至主动悬架控制单元21中;轮速传感器安装于汽车车架上,轮速传感器用于采集车速信息,并将车速信息传递至主动悬架控制单元21中。
50.具体的,方向盘转角传感器装在汽车转向管柱上,方向盘转角传感器检测方向盘的转动角度并生成转角信号传递给主动悬架控制单元21中,加速度传感器是与油门踏板连接,采集踏板油门开度信号,轮速传感器采集车速信号,以及加速度信号传递至主动悬架控制单元21中,主动悬架控制单元21进行分析计算,同时与电子控制单元17、自动变速箱控制模块18、防抱死制动系统19和车身电子稳定系统20进行通信后,给执行系统,即主动悬架系统发出相应指令。
51.在可选的实施方式中,主动悬架控制单元21包括前左减震执行器、前右减震执行器、后左减震执行器和后右减震执行器;前左减震执行器、前右减震执行器、后左减震执行器和后右减震执行器均与主动悬架控制单元21电连接,主动悬架控制单元21配置为能够根据运动数据信息生成减震控制信号,并将减震控制信号传递至前左减震执行器、前右减震执行器、后左减震执行器和后右减震执行器中。
52.具体的,执行系统包括前左减震执行器、前右减震执行器、后左减震执行器和后右减震执行器,根据传感器组件检测到运动数据信息生成减震控制信号,前左减震执行器、前右减震执行器、后左减震执行器和后右减震执行器对应执行控制信号。
53.如图2、图3所示,其中,在图3中,点划线为车辆在颠簸状态下渐进式弹簧的弹性系数与减震器阻尼系数关系曲线,粗虚线为车辆在高速转弯状态下渐进式弹簧的弹性系数与减震器阻尼系数关系曲线,细虚线为车辆在急减速状态下渐进式弹簧的弹性系数与减震器阻尼系数关系曲线,实线为车辆在急加速状态下渐进式弹簧的弹性系数与减震器阻尼系数关系曲线。
54.在可选的实施方式中,主动悬架系统还包括渐进式弹簧;渐进式弹簧安装在车架与车轮14之间,渐进式弹簧的两端圈径尺寸小于渐进式弹簧的中部圈径尺寸。
55.具体的,安装在车架与车路之间的弹簧为渐进式弹簧,即渐进式弹簧由中间向两端的弹簧圈径逐渐减小,渐进式弹簧采用不等螺距不等圈径的设计,即两端圈径小,中间圈径大。弹簧中圈径大,刚性就会相应增大,对于螺距亦是如此。两端弹簧被压缩的力要小于中间部分,所以当小颠簸和冲击力小的时候只通两端部分就可以吸收掉,能保证一定的舒适性。而应对车身因为制动俯冲、转向侧倾等状况,就可以由中间k值较大部分来提供支撑,可以更好地抑制车身滚动。渐进式弹簧的k值随着压缩量的增加而增大,不等螺距弹簧受压缩时会产生局部线间接触,以使有效圈数发生变化,进而造成弹力系数k的变化,兼顾舒适性但又兼顾了支撑力。
56.本实施例提供的基于汽车主动悬架智能自动调节系统的控制方法,包括以下步骤:抗后坐步骤:通过传感器组件检测油门踏板移动速度和位移,当传感器组件检测到汽车
处于急起步加速状态时,电子控制单元17通过执行器增加减震器阻尼力,且调整渐进式弹簧,以使渐进式弹簧能够抵抗汽车起步时产生的车速后坐力。
57.具体的,通过传感器组件检测油门踏板移动速度和位移,当车速低于20km/h且加速度大时,即急起步加速状态,电子控制单元17通过执行器将减震器阻尼力调到比较硬的状态,同时弹簧刚度进入到高值,从而抵抗汽车起步时车速后坐,如果此时驾驶员驾驶车辆选择了“常规值自动控制”状态,则弹簧刚度和减震器阻尼力由软调至硬;如果此时驾驶员选择了“高速行驶自动控制”状态,则刚度和阻尼力由中调至硬。
58.在可选的实施方式中,包括以下步骤:抗侧倾步骤:通过方向盘转角传感器检测方向盘的转动角度,方向盘转角传感器检测到汽车处于急转弯状态时,主动悬架控制单元21通过执行器加大内轮减震器阻尼力和弹簧刚度,减小外轮减震器阻尼力和弹簧刚度,以抵抗车身侧倾。
59.具体的,由装于转向轴的光电式方向盘转角传感器检测方向盘的操作状况,急转弯时,主动悬架控制单元21通过执行器使得内外、减震器阻尼力和弹簧刚度转换到不同的硬度,内轮减震器阻尼力和弹簧刚度加大,外轮减震器阻尼力和弹簧刚度减小,以抵抗车身侧倾。
60.在可选的实施方式中,还包括以下步骤:当轮速传感器检测到车速高于60km/h且紧急制动时,主动悬架控制单元21通过执行器增加前轮弹簧刚度和前轮减震器阻尼力,减少后轮弹簧刚度和后轮减震器阻尼力,以对抗车身前部的下倾力。
61.具体的,抗点头步骤:在车速高压60km/h时紧急制动,主动悬架控制单元21通过执行器使得前轮弹簧刚度和减震器阻尼力调高,后轮弹簧刚度和减震器阻尼力相对减小,以对抗车身前部的下附。
62.在可选的实施方式中,还包括以下步骤:当轮速传感器检测到车速大于110km/h时,主动悬架控制单元21通过执行器将弹簧刚度和减振器阻尼力调至中间值。
63.具体的,当车身大于110km/h时,主动悬架控制单元21将使弹簧刚度和减振器阻尼力调至中间值,从而提高告诉行驶时操纵稳定性,即使驾驶员选择了“常规值自动控制”状态,即刚度和阻尼处于低、软值,系统也将刚度和阻尼力调至中间值。
64.在可选的实施方式中,还包括以下步骤:当轮速传感器检测到车速在30~80km/h内,且前轮车高传感器检测出路面有第一凸起时,主动悬架控制单元21通过执行器减少弹簧刚度和减震器阻尼力。
65.具体的,车身在30~80km/h范围内时,若前轮车高传感器检测出路面有小凸起,例如前轮通过混泥土路面接缝等,则在后轮越过该凸起之前,系统将使弹簧刚度和减震器阻尼力调至低(软)值,从而提高汽车乘坐舒适性。此时即使驾驶员选择了高速行驶状态,系统仍将刚度和阻尼利调制低值。为了不影响高速时的操纵稳定性,这种动作在车速为80km/h以下才发生。
66.在可选的实施方式中,还包括以下步骤:当轮速传感器检测到车速在40~100km/h内,且前轮车高传感器检测出路面有第二凸起时,主动悬架控制单元21通过执行器将弹簧刚度和减震器阻尼力调至中间值。
67.具体的,车速在40-100km/h范围内,当前轮车高传感器检测出路面有较大凸起时,例如汽车通过损坏的铺砌路面等,主动悬架控制单元21将弹簧刚度和减震器阻尼力调至中
间值,以拟制车体的前后颠簸、震动等大动作,从而提高汽车的乘坐舒适性和通过性,车速高于100km/h时,系统将使刚度和阻尼力调至高硬值。
68.需要注意的是,第一凸起的凸起高度小于第二凸起的凸起高度,即对于车辆行驶来讲,第一凸起产生的颠簸小于第二凸起产生的颠簸。
69.另外,在良好路面正常行驶时,弹簧刚度和减振器阻尼力由驾驶员选择“常规值自动控制”状态,刚度和阻尼力处于低值;“高速行驶时自动控制”状态,则刚度和阻尼力为中间值。
70.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。