具有自动化提升组件的系统以及从递送车辆装载和卸载货物的方法
1.相关申请的交叉引用
2.本技术要求2019年5月3日提交的美国临时申请序列号62/842/899的优先权,该申请的全部公开内容通过引用并入本文。
技术领域
3.本发明涉及一种作为相关联的递送车辆的一部分或现有相关联的递送车辆的改装而结合的系统。该系统包括自动化提升组件,并且限定了用于从相关联的递送车辆卸载货物的方法,但是可以理解该系统和方法也可用于运输和/或将货物装载到递送车辆中。
背景技术:
4.递送车辆在本领域内是众所周知的。例如,板式货车、载货卡车和牵引拖车的拖车都用于将货物从一个场所运送到另一场所。如上所述,本发明可以被包括作为原始递送车辆的一部分,或者可以提供作为改装选项,用于将递送车辆转换为自动化/自动提升组件。车辆本身可以是自动的,也可以是需要驾驶员的。
5.在递送商品(通常在此称为货物或货物物品,但可涉及各种商品、容器、包裹、箱子等)方面,对递送车辆的需求迅速增加。相信随着时间的推移,这些车辆中会有更多是自动的或半自动的(减少用于装载、卸载和运输货物所需的人力或互动),并可能提供无人驾驶递送车辆,这些车辆将从第一场所(如工厂、仓库、邮局等)提取货物,并将货物运输到第二场所(例如,邮局、递送中心或中转仓库、企业、住宅等)。还可以设想,递送车辆将运送各种货物,即货物可能并非全部都是相同的物品,或者甚至不是相同类型的物品、尺寸、重量等。因此,递送车辆的货舱可能是具有多个舱室部分的货舱。
6.货舱优选地包括门,该门选择性地允许进入舱室,从而允许将额外的货物添加到一个或更多个舱室部分,或移除先前布置在舱室部分中的货物。当沿着指定路线将货物添加至舱室或从舱室离开时,可能还需要在不同的舱室部分对货物进行重新定向。例如,最初存储在一个舱室部分中的货物可以沿着递送路线重新安排,例如,当一些货物变得不易接近时,需要重新安排沿着路线已经提取或重新安排的货物,以在期望的场所完成递送。
7.因此,需要提供了至少一个或更多个上述特征的改进的系统、方法和布置的需求,这种改进的系统、方法和布置克服一个或更多个已知的缺陷,并且提供了其他特征和优点。
技术实现要素:
8.为相关联的递送车辆提供了一种自动的货物装载或卸载系统。
9.该系统优选地包括将相关联的货物存储在至少一个舱室部分中的相关联的车辆的存储舱室,该存储舱室将相关联的货物存储在至少一个舱室部分中,在舱室部分,货物通过开口从至少一个存储舱室接收或货物通过开口递送至存储舱室。传送机位于每个舱室部分中,并构造为协助从舱室部分递送相关联的货物或将相关联的货物接收到舱室部分。提
升组件可移动地安装至存储舱室,并构造为从舱室部分接收相关联的货物。该提升组件包括提升组件传送机,该提升组件传送机从舱室部分接收相关联的货物或将相关联的货物递送至舱室部分。
10.存储舱室可被分为多个舱室部分,诸如至少两个舱室部分高乘以两个舱室部分宽(2x2)的阵列。
11.提升组件包括平台,该平台从舱室部分之一接收相关联的货物或将相关联的货物递送至舱室部分之一。
12.优选的安装组件可移动地将提升组件固定至存储舱室,安装组件包括第一竖直导向件和第二竖直导向件,第一竖直导向件和第二竖直导向件定位于存储舱室水平间隔开的地点。提供了竖直间隔开的地点的第一水平导向件和第二水平导向件,并且每个水平导向件包括第一端和第二端,第一端和第二端与竖直导向件彼此连接并且相对于该竖直导向件竖直地可移动。平台优选地固定至第一水平导向件和第二水平导向件,并在第一竖直导向件和第二竖直导向件之间沿着第一水平导向件和第二水平导向件可移动,由此平台能够定位在阵列的选定舱室部分处。
13.第一实施例中的平台具有枢转地安装至第二水平导向件的第一边缘,由此平台在第一竖直位置和第二水平位置之间,或第一存储位置和第二展开位置之间可移动。
14.至少一个连杆组件包括第一连杆和第二连杆,第一连杆的第一端固定至第一水平导向件,第二连杆的第一端固定至平台第二边缘,并且第一连杆的第二端和第二连杆的第二端彼此铰接地连接。
15.可以期望的是,平台可移动地安装至第一水平件和第二水平件,使得平台可以相对于舱室部分侧向地移动。
16.还可以期望的是,平台可移动地安装至第一竖直件和第二竖直件,使得平台可以相对于舱室部分竖直地移动。
17.安装组件可以被确定尺寸使得平台能够移动到舱室部分下方的水平地点。
18.一种布置中的平台包括与平台操作地相关联的提升组件传送机。
19.在优选的布置中,提升组件传送机包括由间隙分隔的第一传送机部分和第二传送机部分,以及至少一个推杆,推杆延伸穿过该间隙并且被构造为与平台上接收的相关联的货物接合且便于第一相关联的货物部件相对于相邻的第二相关联的货物部件移动。
20.安装推杆用于与第一传送机部分和第二传送机部分一起移动。
21.在一个实施例中,推杆被加重并安装至平台,由此,当推杆从第一边缘跨过提升平台至第二边缘时,推杆延伸穿过间隙并延伸到第一传送机部分和第二传送机部分的表面上方,当推杆从第二边缘跨过提升平台至第一边缘时,该推杆位于表面下方。
22.传感器可以被提供用于监控相关联的货物从舱室部分传送机到提升组件传送机的移动。
23.一种布置中的系统包括与舱室部分中的至少一个的传送机操作地相关联的第一马达、与提升组件传送机操作地相关联的第二马达,以及控制器。控制器与提升组件、安装组件、传感器、第一马达和第二马达通信,以便展开和存储平台,在舱室部分之间和舱室部分下方移动平台,监控第一相关联的货物部件的位置,并响应地控制舱室部分的传送机和提升组件传送机的相对速度,以将第一相关联的货物转移到提升组件传送机上。
24.还提供了用于将相关联的货物装载到相关联的递送车辆或从相关联的递送车辆卸载相关联的货物的方法。
25.递送车辆包括具有舱室部分的存储舱室系统,该舱室部分被确定尺寸以便在其中接收货物,与舱室部分中的至少一个的传送机操作地相关联的第一马达,以及提升组件,该提升组件具有带有提升组件传送机的平台,其中提升组件经由安装组件固定至存储舱室系统、传感器、第二马达和控制器,第二马达与提升组件传送机操作地相关联。控制器与提升组件、安装组件、传感器、第一马达和第二马达通信,第一马达与舱室部分操作地相关联,第二马达与提升组件传送机操作地相关联,以便展开和存储平台,在舱室部分之间移动平台,并将相关联的货物从舱室部分转移至平台和/或地表面。
26.转移步骤包括将相关联的货物从舱室部分移动到舱室部分下方地点(例如地表面)的地表面。
27.该方法可包括在转移步骤期间感应相关联的货物的位置,并且操作舱室部分传送机和提升组件传送机,以分隔相关联的第一货物物品和第二货物物品。
28.移动步骤包括在竖直偏置的舱室部分之间升高和降低平台,和/或在水平偏置的舱室部分之间侧向地移动平台。
29.该方法进一步包括在存储位置和展开位置之间移动平台。
30.平台移动步骤包括在限定了存储位置的竖直方位和限定展开位置的水平方位之间枢转平台。
31.存储舱室系统进一步包括门,该方法进一步包括打开和关闭门以选择性地进入存储舱室。
32.可替代的存储舱室系统可以包括成对的带辊子的支撑导轨,允许货物滚入或滚出货舱或舱室部分,而不使用传送机。
33.围栏可以与柔性驱动件(如链条、线缆或皮带)相关联,以将货物推入或推出舱室或舱室部分。
34.可以监控驱动第一围栏和第二围栏的第一马达和第二马达,并且有利地将第一马达和第二马达用于挤压相邻布置的货物物品或对其施加纵向的压缩力,这些货物物品接收在第一围栏和第二围栏之间。
35.后围栏(例如第二)围栏也可以自动地从竖直的货物推送位置移动到水平的桥接位置,在桥接位置,围栏用作延伸件,将货物从存储舱室系统的辊子桥接或转移至平台。
36.选择性地将后围栏用作桥,这允许在提升组件和存储舱室系统之间存在间隙,以容纳允许舱室的选择性进入的可移动的门。
37.本公开的第一优点是能够提供提升组件,该提升组件具有竖直地向上和向下行进的平台,并且该平台相对于存储舱室从侧面到侧面侧向地行进。
38.另一益处在于使用了与舱室部分相关联的集成传送机,以及与提升平台相关联的集成传送机,该提升平台用于将货物移到/移出递送车辆。
39.又一优点与控制器相关联,该控制器提供从递送车辆装载/卸载货物的自动操作,将货物重新定位在车辆的单独的舱室部分中,并根据需要将货物沿地表面定位在不同的地点。
40.软件监控与分别驱动第一围栏和第二围栏的第一马达和第二马达相关联的电流
消耗,以确定围栏之间的货物物品上是否受到挤压力或压缩力。
41.货物上的挤压力和压缩力可用于理想地将货物定位在舱室内,和/或在车辆操作期间车辆加速和减速时稳定货物。
42.从阅读和理解以下详细描述,将会使本公开的益处和优点变得更加清晰。
附图说明
43.图1-图23是一系列图示,示出了从相关联的轮式递送车辆上卸载(以及装载或用于运输的临时存储)货物(带或不带托盘的产品、箱子、容器等)。
44.图24是优选地带有一体式轮子的存储容器或吊舱的立体图,用于在其中接收和存储货物。
45.图25是存储设施的图示,在该存储设施中可以存储例如各个图中所示的存储容器/吊舱。
46.图26是一种替代组件的立体图,该替代组件用于处理货物插入和存储至车辆货舱或从车辆货舱移除货物。
47.图27和28分别是图26所示组件右手部分和左手部分的放大立体图。
具体实施方式
48.提供以下参考附图的描述,有助于全面理解由权利要求及其等价物限定的本公开的一个或更多个实施例。该描述包括有助于理解的各个具体细节,但这些具体细节仅仅是示例性的。相应地,本领域的普通技术人员将认识到,在不脱离本公开的范围和精神的情况下,可以对本文描述的各个实施例进行各个更改和修改。本公开的各个示例性实施例不限于不同实施例的具体细节,并且这些实施例应当被理解为包括所有变更和/或等效物或替代物,这些变更和/或等效物或替代物包括在所附权利要求的思想和技术范围内。在描述附图时,在可能的情况下,相似的附图标记用于相似的元件。
49.本公开中使用的术语“包括”或“可以包括”是指所公开的相应功能、操作、元件等的存在,并且不限制额外的一个或更多个功能、操作、元件等。此外,应当理解,本公开中使用的术语“包括”、“包含”、“具有”或“带有”是指说明书中描述的部件、特征、编号、步骤、操作、元件、零件或其组合的存在,而并不排除一个或更多个其他特征、编号、步骤、操作、元件、部件或其组合的存在或添加。
50.本公开中使用的术语“或”或“a或/和b中的至少一个”包括与它们一起列举的任意一个和全部词语的组合。例如,“a或b”或“a或/和b中的至少一个”意味着包括a,包括b,或同时包括a和b。
51.尽管本公开中使用的诸如“第一”和“第二”等术语可以修改不同示例性实施例的各个元件,但这些术语并不限制相应的元件。例如,这些术语不限制相应元件的顺序和/或重要性,也不排除另外的元件(例如,第二、第三等)。这些术语可用于将元件彼此区分。例如,第一机械装置和第二机械装置都指代机械装置,但第一机械装置和第二机械装置可以指代不同类型的机械装置或相同类型的机械装置。例如,在不脱离本公开的各个示例性实施例的范围的情况下,第一元件可以被命名为第二元件,并且类似地,第二元件可以被命名为第一元件。
52.应当理解,当元件被提及为“连接”或“联接”到另一元件时,该元件可以直接连接或联接到另一元件,在该元件和另一元件之间可能存在中间元件。相反地,应当理解,当元件被提及为“直接连接”或“直接联接”到另一元件时,在该元件和另一元件之间不存在中间元件。
53.本公开的各个示例性实施例中使用的术语仅用于描述特定示例性实施例,并不旨在限制本公开的各个示例性实施例。如本文所使用的,除非上下文另有明确指出,否则单数形式也旨在包括复数形式。
54.本文使用的包括技术术语或科学术语的所有术语,除非另有限定,否则这些术语的含义与本领域普通技术人员通常理解的含义相同。除非在各个示例性实施例中被明确限定,在通用词典中定义的术语应被解释为具有与相关技术的上下文含义相同的含义,并且不应被解释为具有不一致或夸大的含义。
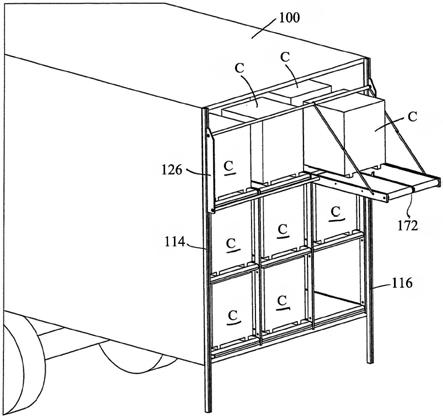
55.图1所示为轮式递送车辆100(诸如货车、箱式卡车、拖车等)或可以选择性地安装至车辆上或从车辆上移除的存储容器吊舱的背端或后端,该递送车辆100具有门102,以提供通向内部货舱104的入口。在所示的实施例中,门102是诸如车库门的升降门,该门具有一系列面板,每个面板由辊子沿相对的边缘支撑,辊子接收在大致c形的轨道中。没有对该门的具体细节进行说明,因为本领域技术人员熟知并完全理解这种升降门的结构和操作,因此进一步的描述对于全面和完整地理解本公开内容是不必要的。此外,此类门102的图示并不排除其他类型的门的使用,而是表示了打开和关闭通向车辆100的货舱104的入口的能力。
56.附接(例如,添加或改装)到车辆100的后端,或集成作为原始车辆的一部分的是自动提升门或提升组件110。提升组件110经由安装组件112连结至车辆100的货舱104。安装组件112包括第一和第二竖直延伸轨道或通道114、116,第一和第二竖直延伸轨道或通道114、116位于货舱104后部的侧向外部边缘。如图所示,通道114、116可以延伸出比存储舱室104更大的竖直范围,尤其是在这种情况下,通道从通往货舱104的开口或入口的下部边缘向外延伸。尽管通道114、116示出为始终在货舱较低层级以下延伸的静态部件,但也可预期到,这些通道可以终止于货舱基部,并且包括为这些通道提供延伸长度的可延伸/可缩回或可伸缩的部分,因此,在货物的装载或卸载的过程中,如果不使用,通道就会折叠或缩短长度。在优选的布置中,安装组件112包括大致矩形的框架120,该框架120具有第一水平件或上部水平件122和竖直间隔开的第二水平件或下部水平件124。此外,框架120包括连结到第一水平件和第二水平件122、124的相对端的第一竖直件和第二竖直件126、128。
57.在一个优选的实施例中,安装组件112的部分,特别是通道114、116和框架120,支撑提升组件110用于相对于货舱104的移动。更具体地,提升组件110包括连结至框架120的平台140,该平台要么作为车辆100的一部分被制造要么在货舱104的开口端处安装到车辆100上。特别地,框架120和平台140相对于货舱104以下文将进一步描述的方式移动。在一个优选版本中,平台140优选地沿第一边缘枢转地或铰接地安装至框架120,特别是安装至下部水平件124。框架120进而相对于货舱104可移动。然而,通常地,框架120旨在用于选择性的竖直移动,其中移动的竖直范围至少为大致与门102的高度匹配的尺寸,从而提供通向整个货舱104的入口。此外,框架120优选地能够竖直地向下移动,使得框架的第二水平件或下部水平件128以及枢转地附接到其上的平台140与例如与车辆100后端下方的地表面相邻。
58.如上所述,平台140安装至框架,特别是第二水平件124,例如,使得平台可以在存储的竖直直立位置(图1、图16和图17)和操作的水平位置(图2-图14)之间枢转。第一臂和第二臂142、144(图2-图3)在平台112的第二边缘和第一水平件或上部水平件122之间延伸。在所示的实施例中,每个臂142、144是双杆连杆,其中第一连杆臂部分142a(142b)经由销连接件146可旋转地连结至第二连杆臂部分144a(144b),销连接件146允许围绕着第一连杆臂部分和第二连杆臂部分之间的销进行选择性的旋转或枢转动作。每个第一连杆臂部分142a、142b在第一端可旋转地连结至框架120的第一水平件或上部水平件122。每个第二连杆臂部分144a、144b具有分别经由销146a、146b可旋转地连结到各自的第一连杆臂部分142a、142b的第一端。此外,每个第二连杆臂部分144a、144b的第二端可旋转地连结至平台140,特别是可旋转地连结至平台140的侧框架150。
59.在存储位置(即,当平台140处于存储的竖直直立位置时),第一连杆臂部分和第二连杆臂部分142a、144a和142b、144b彼此重叠(图1)。另一方面,在展开位置,即当平台140处于操作的水平位置(图3)时,第一连杆臂部分和第二连杆臂部分142a、144a大致纵向地对齐。图2示出了连杆臂部分142a、144a在存储和展开位置之间的过渡位置。马达(例如电动、液压、气动等)在存储位置和展开位置之间选择性地移动平台140。
60.尽管在优选的布置中,如图1所示,平台140被存储在竖直直立位置,但本领域技术人员将认识到,在不偏离本公开的范围和意图的情况下,可以使用平台的替代存储地点和位置。连杆臂142、144的移除以及框架120的上部水平件122的可能的移除消除了使连杆臂限制货物在侧向方向上的移动能力,但允许平台140被存储例如在存储舱室下方的水平位置。在这种替代布置中,平台140可以被移动到货舱上方或下方的水平存储位置。同样地,由于能够提供本公开的提升组件作为现有车辆的改装选项,以及提升组件110易于并入oem车辆结构中,因此,可以进行修改,以适应平台140沿货舱104的一侧或甚至在货舱内的存储,尽管这些替代方案都被认为不如附图所示的那样可取。
61.另一马达相对于通道114、116竖直地向上和向下移动框架120,从而选择性地将平台140重新定位在相对于货舱104的不同竖直地点(参见图2-图4中的平台的三个不同层级)。此外,框架120在竖直方向上的移动范围延伸到例如如图12所示的货舱104下方的较低位置,使得货物物品可以从平台140转移到相关联的表面,诸如地表面。
62.又一马达相对于框架120侧向地移动平台140,由此平台可以相对于存储舱室104侧面对侧面地重新定位。例如,图2-图4的对比说明了平台140的侧向移动。应当理解,框架120的竖直移动(以及由此产生的平台140的竖直移动)可以独立于平台的侧向移动,或者与平台的侧向移动相结合,从而使平台140的速度和有效操作最大化。
63.图2-图15说明了货舱104可以是一个大舱室,也可以细分为独立的舱室部分。例如,如果货舱104没有物理分割或分隔,则可以在单个货舱中接收大型或小型货物物品。在其他情况下,货舱104可被分为(i)物理分隔的舱室部分(即,包括物理屏障的舱室部分),(ii)没有将该舱室部分的区域分隔为更小部分的物理屏障而是作为单独的舱室部分运行的舱室部分,或(iii)舱室部分的物理分隔区域或非物理分隔区域的组合。还应当理解,舱室部分可以是相同的尺寸或可以不是相同的尺寸。例如,如图2所示,货舱104有三个单独的层级104a、104b、104c。第一层级或上层级104a形成部分由货舱104的侧壁和货舱的上壁或天花板限定的舱室部分。没有物理屏障侧向地细分或分隔上层级104a,但是,上层级“被图
示”为三个单独的舱室部分,由三个单独的货物物品侧向地延伸穿越上层级所证实。上层级104a的“地板”由三个单独的传送机160构成,此处示出为相同尺寸的传送机(尽管应当理解,传送机也可以具有不同的尺寸)。舱室部分中的每个传送机160以及与可移动的平台140相关联的传送机160具有传统构造,该构造至少包括第一和第二传送机辊子162(图19-图20),第一和第二传送机辊子162纵向间隔开(并且可能包括多个中间传送机辊子)并由皮带164包围,皮带164以连续环状延伸并围绕传送机辊子旋转。尽管传送机160是一种传统结构,但为了便于说明和更具体地示出以间隔关系布置的辊子162,在图19-图20中,皮带164从传送机部分之一上移除。平台140上相邻的传送机160的辊子162优选地彼此连接,从而独立的皮带164以相同的速度移动。通常,传送机辊子162中的一个或更多个被供以动力或者是机动的,使得皮带164旋转并限定围绕第一最末端的辊子前进的移动的上皮带表面164a,然后限定随着皮带朝向第二最末端的辊子前进的移动的下皮带表面164b。因此,货物物品c搭载在传送机160的上皮带表面部分164a上并通过其移动,以将独立的货物物品朝向货舱104的门/开口推进。同样地,相邻的传送机160上的货物物品c也类似地朝向货舱104的门/开口推进。单个货舱中的传送机160或单独的舱室部分中的传送机在结构上相似,并且以基本相同的方式运行,因此除非具体地描述为仅适用于这些最终用途之一,传送机160的结构和功能的描述适用于平台上的传送机或货舱/舱室部分中的传送机。
64.较低的两个层级104b、104c被传送机160物理地分隔,传送机160位于舱室部分这些层级之上和之下。此外,两个层级104b、104c由竖直分隔器170物理地分隔。这里,分隔器170在这两个层级104b、104c中的每一个中限定三个侧向地间隔的、物理上分隔的舱室部分。此外,如应当理解的,舱室部分不必每个都具有相同的尺寸(水平地和/或竖直地),而仅以这种方式示出以便于说明。同样地,根据递送的货物类型c的具体要求,可以提供更多或更少数量的舱室部分。
65.用于不同舱室部分的传送机160优选地由单独的马达(未示出)驱动,或由一个或更多个共同的马达驱动,其中马达动力的适当分配可以分配,以便独立地和/或同时地操作一个或更多个传送机。
66.平台140优选包括传送机160或优选地由间隙172分隔开的第一传送机和第二传送机,该间隙沿平台传送机的独立皮带164的移动方向延伸。特别是,一个或更多个推杆180(图19)沿柔性驱动件(诸如与平台传送机160的皮带164一起旋转的链条182)以间隔布置方式固定。推杆180的尺寸被确定为延伸至平台传送机160的皮带164的上表面164a上方,并且优选地推杆自动地移动或折叠到降低高度的位置,在该位置,推杆不会延伸到每个传送机的皮带返回路径上的皮带的下表面164b上方(图20)。尽管推杆180可以以不同的方式移动到折叠/非操作状态,但优选的实施例将推杆固定至链条182,链条182在平台140的两个传送机160之间旋转或行进。推杆180优选地在一端加重,使得当推杆沿其旋转路径顶部行进时(图19),重力使推杆竖起来(图19-推杆从链条182垂直地延伸并穿过平台传送机160之间的间隙172),并且当推杆移动到链条运行路径的底侧时,推杆自动缩回(图20
–
推杆大致与链条对齐,不延伸穿过间隙)。以这种方式,通过沿货物物品的选定高度物理邻接并抵靠货物物品的边缘并且通过限制货物物品和平台传送机的上表面之间的潜在滑动,推杆180可以协助移动传送机160的上表面164a来移动其上接收的货物c。相反地,推杆180在传送机160和链条182行进的返回路径中自动地缩回,使得推杆不会无意中接触与平台传送机底侧
相邻布置的任何物体。
67.此外,传感器190(图21-图22),诸如光学传感器,引导光束穿越舱室部分的后部。传感器可位于各种位置,并且传感器优选地位于每个舱室部分的后端或其附近,其中货物物品c将从舱室部分转移到平台140。通过以高于独立的舱室部分的传送机160的速度操作平台传送机160,由于当货物物品转移到平台传送机160上并与舱室部分中的传送机上的下一个相邻货物物品分隔时增加的速度,可能已经与独立的舱室部分(图21)内的相邻货物抵靠的货物物品c将分离并且在独立的货物物品c之间形成空间(图22)。这种增加的速度产生了传感器190检测到的空间,从而可以停止舱室部分传送机160的移动,以及同样地,停止舱室部分传送机上的下一个相邻的货物物品c的移动。通过这种方式,只有期望的货物物品c才被转移到平台140上。此后,平台140可以被移动到另一舱室部分,并且平台传送机160的旋转方向被反向,以将货物物品c装载到另一舱室部分(图7-图9),或可以将平台移动到另一期望位置,例如地表面,然后在这个位置重新启动平台传送机,以将货物物品从平台上移动或弹出(图12)。推杆180确保货物物品c有效且高效地从平台传送机160移走。然后可以对一个或更多个额外的货物物品c重复该操作,如图13-图15所示。
68.还应了解,传感器190中的一个或更多个可构造为读取诸如条形码标签或或无线检测/读取与独立的货物物品c相关联的rfid芯片信息的标记,以识别哪个货物物品已被转移到平台140。还应理解,控制器或处理器(计算机)(未示出)可操作地与存储器交互,存储器存储从传感器190接收的关于货物物品c在存储舱室104中的特定地点的信息或数据,无论货物是否已经递送,和/或无论该货物物品递送的地点和时间如何(如果货物物品已经递送的话)。因此,可以将进一步的数据或信息(诸如gps和/或日期/时间信息和/或舱室温度等)输入控制器/处理器,用于监控和跟踪货物,并且可以在适当的显示装置(未示出)上显示部分或全部数据/信息,该适当的显示装置与车辆或便携式装置(诸如平板电脑、智能手机等)相关联,或以任何常规方式(例如,有线或无线)将部分或全部数据/信息转移到远程计算机系统或装置(未示出),和/或如果需要信息的硬拷贝,则打印该部分或全部数据/信息。
69.马达以及与门、传送机、传送机部分、提升组件等的操作相关联的传感器均与控制器(未示出)相互连接。控制器可编程为自动地打开门102(图1和图2),降低提升组件的平台140(图2),将平台移动到存储舱室104的期望地点(图3和图4),将货物物品c从舱室部分卸载到平台上(图5和图6),将货物物品移动到另一舱室部分(图7、8和9),将平台移动到舱室部分并接收另一/第二货物物品(图10),将第二货物物品移动到诸如地表面(图11)的期望地点,将第二货物物品从平台移到地表面(图12),将平台移动到舱室部分以检索另一/第三货物物品(图13),将第三货物物品移动到诸如地表面的期望地点,并将第三货物物品从平台移动到地表面(图14)上,将平台从展开位置(图15)移动到存储位置(图16),然后关闭存储舱室的门(图17)。
70.图23示出了从存储舱室104延伸的杆或销192,其用于选择性地接合平台140。杆192牢固地固定至竖直通道114、116中的一个,并且在一些情况下,杆可以固定至每个竖直通道,从而如果使用两个杆的情况下,对一个杆的描述也适用于另一个杆。杆192被安装使得当平台140如上文所述相对于存储舱室104侧向地移动时将货物物品c装载到存储舱室的各个舱室部分,以及将货物物品c从存储舱室的各个舱室部分卸载,平台不会接合杆。然而,
杆192协助平台140从水平展开位置旋转到竖直存储位置(图1)。特别地,杆192向后延伸足够大的尺寸,使得当平台140的边缘(即,与存储舱室104相邻的边缘)定位在杆的下方时,平台随后向上移动,杆与平台边缘的邻接接合对平台施加力矩、力偶、或扭矩,使平台围绕水平件124从水平展开位置枢转或旋转至竖直存储位置。通常,平台140在使用(即,在平台的展开状态下,向上和向下和/或侧向地侧面到侧面地移动)时,平台的外侧面与杆192向内地间隔开,使得平台边缘不与杆接合。
71.图24示出了在其中存储货物物品的可移动的存储容器或箱c’。可移动的存储容器或箱c’优选地具有用于通向内部存储舱室300的一个或更多个门302。还可以设想,可移动的存储容器c’具有轮子306,以便于容器在地表面上的滚动运动。优选地,可移动的存储容器c’的尺寸被确定为用于接收在传统皮卡车310(图25)的卡车车厢中和从其离开。还可以设想,可移动的存储容器c’可以从卡车310上装载和卸载,例如,使用申请日期为2019年4月30日的共有专利申请pct/us19/29949中示出且描述类型的装载机/卸载机,该专利的全部公开内容通过引用明确并入本文。替代地,与存储建筑或仓库w相关联的提升平台320可以被定位在卡车310的后端,使得可移动的存储容器c’可以解锁并从卡车车厢滚动到提升平台上。此后,提升平台320可以将存储容器c’移动到仓库w中所期望的存储地点。这允许消费者在远离仓库w的场所填充或清空可移动的存储容器c’,并且使用常规的皮卡车310将可移动的存储容器转移至存储设施或仓库。传统的皮卡车310的使用有利地允许消费者放弃对专用卡车的需要,并且便于货物物品的移动和存储。
72.图26-图28示出了用于处理货物插入、运输过程中临时存储以及从车辆货舱中移除的替代组件400。该替代存储舱室系统400与先前结合图1-23描述的提升组件110(图26-28中未示出)配合。特别地,系统400包括第一和第二平行且细长的支撑导轨402,支撑导轨402接收相对于其旋转的辊子404的相对端,使得货物物品c可以在辊子上滚动并且在旋转辊子上进入和离开卡车或拖车舱室(未示出)。支撑导轨被支撑腿406支撑在水平位置,例如,在第一和第二导轨的每一端附近提供至少四个支撑腿。如果需要额外的支撑或刚度,可以在中间位置提供额外的支撑腿406。
73.优选地在第一支撑导轨和第二支撑导轨402上安装各自的柔性驱动件410。在图26-图28所示的这种布置中,柔性驱动件410是链条、线缆、皮带,例如,该柔性驱动件以连续环状从系统400的前端延伸到其后端。柔性驱动件410搭载在间隔设置且与第一和第二支撑导轨平行的通道中,并且响应于分别来自第一和第二马达412的驱动输出而选择性地沿顺时针或逆时针方向移动。因此,第一马达412向前或向后驱动(旋转)第一柔性驱动件410,并且类似地,第二马达412独立地或与第一柔性驱动件一起向前或向后驱动(旋转)第二柔性驱动件410。第一围栏或前围栏420安装至第一柔性驱动件410,并且通过第一柔性驱动件410向前或向后移动。类似地,第二可移动围栏422附接到第二柔性驱动件410。因此,每个围栏420、422优选地仅沿一端/一侧面驱动。为方便起见,围栏420、422由位于相对的支撑导轨402上的各自的柔性驱动件410驱动。第一围栏和第二围栏420、422布置成、定位成或放置成:一个在货物物品c(例如箱子)前面,一个在货物或箱子后面。第一围栏或前围栏420将货物物品c推出舱室或舱室部分,第二围栏或后围栏422将货物推入卡车或拖车内,特别是推入车辆(卡车或拖车)的舱室或舱室部分内。
74.通过适当的软件指令,两个围栏420、422经由驱动马达412和柔性驱动件410可以
被引导着朝向彼此移动(或一个相对另一个移动),以施加预选的压缩力,使得货物箱子挤压在一起,从而在车辆加速或制动时货物不会向前或向后移位。来自各个驱动马达412的电流消耗用于监控施加在货物上的压缩挤压力的“量”,并且软件根据期望引导驱动马达/柔性驱动件410。这些围栏420、422还可以共同工作向前或向后移动货物c,以将货物重量定位在车辆存储舱室中的理想或优选的位置或地点。
75.无论何时后围栏422移动到舱室或车辆的后部,后围栏都会把方位从竖直位置(货物接合位置)更改为水平位置(桥接位置)。这允许货物c在竖直位置被前围栏推出,后围栏在水平位置形成通至装载平台的桥。这为货物c提供了从系统400的舱室辊子到提升组件110的装载平台140的平滑过渡。该布置还允许支撑导轨402的端部和装载平台140之间的间隙或空间接收卷帘门,以在舱室中操作并完全关闭通向舱室的入口。
76.后围栏422通过与支撑导轨402的对接而被支撑在竖直位置,类似于图27中前围栏420所示出的那样。然而,当后围栏422到达与存储舱室后部相邻的支撑导轨402的端部时,支撑导轨的上表面在过渡部分430处变圆,并且朝向支撑导轨的下表面过渡,使得后围栏的纵向向后的移动将后围栏的方位从竖直位置/货物推动位置(图26)过渡到水平位置/桥接位置(如图28所示,朝向水平位置过渡)。反之亦然,当柔性驱动件沿纵向向前方向推进后围栏422时,后围栏在圆形过渡部的上方移动,由此后围栏从水平桥接位置(图28)旋转到竖直/货物推动位置(图26)。
77.本书面描述使用示例来描述包括最佳模式的本公开,并使本领域技术人员能够制作和使用本公开。如果本领域技术人员想到的其他示例具有的结构元件的概念和字面语言并没有与权利要求中的概念和字面语言不同,或者,如果本领域技术人员想到的其他示例包括与权利要求的概念或字面语言没有实质性差异的等效结构元件,那么这些其他示例也旨在落入本发明的范围内。此外,本公开旨在对最初提交供审查的部件和/或步骤组合以及权利要求的组合寻求保护,以及在起诉期间对其他部件和/或步骤的组合以及权利要求的组合寻求潜在保护。
78.尽管上面已经列举了具体的优点,但各个实施例可以包括一些、没有或所有列举的优点。尽管在本文的附图和描述中示出了示例性实施例,但是无论当前已知与否,都可以使用任何数量的技术来实现本公开的原理。此外,可以由更多、更少或其他部件来执行本文公开的系统和设备的操作,并且本文描述的方法可以包括更多、更少或其他步骤。此外,可以以任何适当的顺序执行步骤。
79.为了帮助专利局和本公开的任何读者以及任何由此产生的专利解释本技术所附的权利要求,申请人不期望所附权利要求书或权利要求触发美国专利法第112条第(f)款的问题,除非特定的权利要求中明确使用了“用于
……
的手段”或“用于
……
的步骤”。