1.本实用新型属于农业机械领域,具体涉及一种面向农田的激光灭虫四足机器人。
背景技术:
2.随着农作物播种面积逐年扩大,病虫害防治难度不断加大,我国农药使用量总体呈上升趋势。但我国农药平均利用率仅为35%,只有不足0.03%的农药能起到杀虫作用,大部分农药通过径流、渗漏、飘移等方式流失,使得农田受到不同程度的污染。物理防治逐渐成为解决农药残留问题的有效途径,但是物理杀虫方式有限,主要为定点被动的形式灭虫,效率低,具有较大局限性。
技术实现要素:
3.本实用新型的目的在于克服现有技术中存在的缺点,提供一种灭虫效率高、环保的面向农田的激光灭虫四足机器人。
4.本实用新型的目的通过下述技术方案实现:
5.一种面向农田的激光灭虫四足机器人,包括躯干、四肢、视觉识别模块和激光发射模块;所述四肢为左右腿部镜像对称,包括左前腿、左后腿、右前腿、右后腿,四个腿部的第一舵机1与躯干固定;所述激光发射模块和视觉识别模块平行固定安装在躯干腹部的底部。
6.所述四肢的四个腿部结构相同;所述腿部结构包括髋关节、大腿4、小腿9三个结构单元,共有三个舵机对应三个自由度;髋关节结构单元:第一舵机1为髋关节动力源,髋关节支架8设置有第一转轴,第一转轴和第一舵机1固定连接,使整个腿部能够独立转动;大腿结构单元:第二舵机2为大腿4动力源,大腿4设置有第二转轴,第二转轴和第二舵机2直接相连接;小腿结构单元:第三舵机7为小腿9动力源,第三舵机7固定在髋关节支架8上,小齿轮6设有第三转轴,第三转轴和第三舵机7固定连接;大腿4内部设有轴,大齿轮3和大腿内的轴间隙配合,大齿轮3和小齿轮6相啮合,连杆5和大齿轮3相互铰接,小腿9铰接在连杆5和大腿4上,动力从小齿轮6传动到大齿轮3,再通过连杆5传递到小腿9上。
7.所述激光灭虫四足机器人还包括运动控制模块,所述运动控制模块以单片机作为控制核心,包括舵机控制板、陀螺仪和足端传感器;单片机、舵机控制板和陀螺仪安装在躯干的顶部,用于实时检测身体的俯仰、偏航、翻滚角以进行计算控制;足端传感器安装在小腿的底部,用于检测是否接触地面。所述运动控制模块通过舵机控制板、陀螺仪和足端传感器实时检测身体姿态,通过驱动12个大扭矩舵机,实现在田间等复杂地形控制机器人稳定行走的功能。
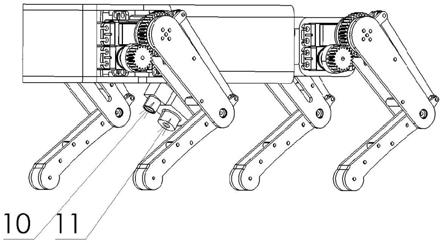
8.所述视觉识别模块包括摄像头10和树莓派,所述摄像头10安装在激光发射器11的正上方。
9.所述激光发射模块包括激光发射器11,所述激光发射器11以模块化接口方式连接在四足机器人的躯干底部。
10.所述面向农田的激光灭虫四足机器人的工作过程,包括下述步骤:机器人在移动
过程中,通过树莓派对摄像头10拍摄的图像进行处理;当识别到害虫时,自动获取害虫的相对坐标并发送给单片机;经由单片机计算,进一步控制各条腿的第一舵机1、第二舵机2和第三舵机7的转动角度,调整机器人的身体姿态与水平位置,使得激光发射器11对准害虫,在环境安全的条件下,发射激光,实现物理灭虫功能。
11.本实用新型与现有技术相比具有如下优点和效果:
12.(1)本实用新型通过改变四足机器人姿态,调整激光角度,完成发射激光物理灭虫,有效避免农田、水源污染,提高灭虫效率。
13.(2)本实用新型的机器人对复杂地形的能力强,机动性高,应用范围广泛,制作和使用成本较低。
14.(3)本实用新型利用四足机器人搭载的激光模块,检测并发射激光进行灭虫,既避免了化学灭虫的环境污染,而且利用足式机器人的高自由度能够适应复杂地形的特点,代替传统轮式机器人在田间进行激光灭虫作业,提高了灭虫效率。
15.(4)本实用新型的四肢腿部结构采用齿轮,可以降低速度、增大扭矩,而且可以减小体积、减轻重量,减少腿部对第一舵机1和第二舵机2的转动惯量,降低电机运动时的负载量。
附图说明
16.图1为四足机器人的结构示意图。
17.图2为腿部结构的正视结构示意图。
18.图3为腿部结构的左视结构示意图。
19.图4为视觉识别模块和激光发射模块的位置示意图。
20.其中,1、第一舵机、2、第二舵机、3、大齿轮、4、大腿、5、连杆、6、小齿轮、7、第三舵机、8、髋关节支架、9、小腿、10、摄像头、11、激光发射器。
具体实施方式
21.为了便于理解本实用新型,下面将结合具体实施例对本实用新型进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本实用新型,但是,不以任何形式限制本实用新型。应该指出的是,对本领域的技术人员来说,在不脱离本实用新型构思的前提下,本实用新型还可以做出若干变形和改进,这些都属于本实用新型的保护范围。
22.实施例1
23.一种面向农田的激光灭虫四足机器人,如图1所示,包括躯干、四肢、视觉识别模块和激光发射模块;所述四肢为左右腿部镜像对称,包括左前腿、左后腿、右前腿、右后腿,四个腿部的第一舵机1与躯干固定;所述激光发射模块和视觉识别模块平行固定安装在躯干腹部的底部,朝向前下方(如图4所示)。如图2、图3所示,四足机器人共有12自由度,即腿部结构共有三个舵机对应三个自由度,四肢的腿部结构包括髋关节、大腿4、小腿9三个结构单元,共有三个舵机对应三个自由度;髋关节结构单元:第一舵机1为髋关节动力源,髋关节支架8设置有第一转轴,第一转轴和第一舵机1固定连接,使整个腿部能够独立转动,髋关节带动大腿4和小腿9整体侧向转动;大腿结构单元:第二舵机2为大腿4动力源,可直接驱动大腿4前后摆动,大腿4设置有第二转轴,第二转轴和第二舵机2直接相连接;小腿结构单元:第三
舵机7为小腿9动力源,第三舵机7固定在髋关节支架8上,小齿轮6设有第三转轴,第三转轴和第三舵机7固定连接;大腿4内部设有轴,大齿轮3和大腿内的轴间隙配合,大齿轮3和小齿轮6相啮合,连杆5和大齿轮3相互铰接,小腿9铰接在连杆5和大腿4上,动力从小齿轮6传动到大齿轮3,再通过连杆5传递到小腿9上。
24.四足机器人在巡航过程中,利用机身自带的摄像头10实时捕捉害虫的坐标,并根据害虫坐标调整四足机器人的姿态。依据手机app人工或者系统内置规划的路径,控制机器人移动。在机器人自动行走的过程中,利用激光雷达实时躲避大型障碍物。四足机器人可根据陀螺仪和足端传感器实时检测当前四足机器人的身体姿态,并在不同地形下,识别和计算出四足末端目标坐标的变化。通过逆运动学解算出每个腿部舵机的目标角度,从而达到在田间或其他复杂地形行走的目的。本实用新型还可以通过改变前后腿的高度差从而改变四足机器人的俯仰角,利用左右腿的高度差从而控制机器人的航向角,使得激光发射器11能瞄准害虫。
25.视觉成功识别害虫后,通过上述瞄准方法,使得害虫相对进入目标区域,激光发射系统就会自动启动激光发射器11,发射持续0.1-1s,功率上限为2.5w,破坏害虫的生理结构,实现无害的物理灭虫效果。
26.本实用新型的执行末端可拆卸,可模块化,可以根据需求进行更换不同的模块,借助机器人移动平台,自动完成相应的功能。由此,体现出本实用新型的灵活与多场景适用性。
27.以上所述仅为本实用新型的实施例,但本实用新型的实施方式并不受上述实施例的限制,其他的任何未背离本实用新型的精神实质与原理下所作的改变、修饰、替代、组合、简化,均为等效的置换方式,都包含在本实用新型的保护范围之内。