1.本发明涉及车辆智能驾驶技术领域,尤其涉及一种基于道路交通特征的车辆加速度控制方法及装置。
背景技术:
2.自适应巡航控制系统需要根据前方车辆速度与距离信息计算当前需求加速度大小,并为保证驾驶舒适性,限制车辆不同速度段内的加速度大小。
3.但是,当前不同车速段内的加速度限制大小都是标定用值,所对应的加速模式比较单一化,无法自动调整,不能满足大部分客户对于不同环境下加速响应的需求。本质原因是车辆的加速策略不能随交通场景进行自行调整,尤其在面对拥堵路况以及狭窄道路的情况时,加速度较大引起车速变化过快,从而造成减速不及时产生追尾等安全隐患存在。
技术实现要素:
4.本发明实施例提供一种基于道路交通特征的车辆加速度控制方法及装置,利用传感器确定车辆周围的交通特征,相应调整加速限制控制策略,从而提升自适应巡航控制系统适用性以及整车驾驶的安全性。
5.为实现上述目的,本技术实施例的第一方面提供了一种基于道路交通特征的车辆加速度控制方法,所述方法包括:根据传感器实时获取的交通特征信息,提取出多个交通特征变量;将每个交通特征变量分别输入每个交通特征变量对应的隶属度曲线,得到每个交通特征变量对应的隶属度;根据全部交通特征变量对应的隶属度,结合预设模糊规则得到自适应修正因子隶属度曲线;通过模糊控制算法对所述自适应修正因子隶属度曲线进行处理,得到自适应修正因子;根据所述自适应修正因子,调整车辆加速策略中各车速区间对应的加速度大小;所述车辆加速策略是车辆系统控制器中调整车辆加速度的依据。
6.在第一方面的一种可能的实现方式中,所述多个交通特征变量包括车辆数量、车辆平均速度、车辆平均间距和道路曲率。
7.在第一方面的一种可能的实现方式中,所述每个交通特征变量对应的隶属度曲线是三角形函数曲线或者梯形函数曲线。
8.在第一方面的一种可能的实现方式中,所述自适应修正因子隶属度曲线是三角形函数曲线或者梯形函数曲线。
9.在第一方面的一种可能的实现方式中,所述根据传感器实时获取的交通特征信息,提取出多个交通特征变量,具体包括:根据传感器实时获取预设时间内周围车辆信息以及道路信息,利用箱形图法分别
统计多个交通特征变量数据的分布,并取每个交通特征变量数据的中位数作为每个交通特征变量的具体值。
10.在第一方面的一种可能的实现方式中,所述预设模糊规则需要根据对目标车辆的驾驶记录及目标车辆的用户驾驶习惯的调查进行设置。
11.在第一方面的一种可能的实现方式中,所述传感器包括毫米波雷达和前视摄像头;所述毫米波雷达用于获取道路上的车辆信息;所述前视摄像头用于获取车道线信息。
12.本技术实施例的第二方面提供了一种基于道路交通特征的车辆加速度控制装置,其特征在于,包括:交通信息获取模块,用于根据传感器实时获取的交通特征信息,提取出多个交通特征变量;道路交通分析模块,用于将每个交通特征变量分别输入每个交通特征变量对应的隶属度曲线,得到每个交通特征变量对应的隶属度;所述道路交通分析模块,还用于根据全部交通特征变量对应的隶属度,结合预设模糊规则得到自适应修正因子隶属度曲线;所述道路交通分析模块,还用于通过模糊控制算法对所述自适应修正因子隶属度曲线进行处理,得到自适应修正因子;加速度控制模块,用于根据所述自适应修正因子,调整车辆加速策略中各车速区间对应的加速度大小;所述车辆加速策略是车辆系统控制器中调整车辆加速度的依据。
13.相比于现有技术,本发明实施例提供的一种基于道路交通特征的车辆加速度控制方法及装置,利用毫米波雷达和摄像头等传感器获取周围环境信息并进行分析,得到多个交通特征变量,结合预设模糊规则得到自适应修正因子隶属度曲线,自适应修正因子隶属度曲线再结合模糊控制策略得到自适应修正因子,调整车辆加速策略中各车速区间对应的加速度大小,使车辆能够根据实时路况调整自身的加速度,适应各个环境的加减速要求,极大地增加了行车驾驶的安全性。
附图说明
14.图1是本发明一实施例提供的一种基于道路交通特征的车辆加速度控制方法的流程示意图;图2是本发明一实施例提供的一种基于道路交通特征的车辆加速度控制装置应用示意图。
具体实施方式
15.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
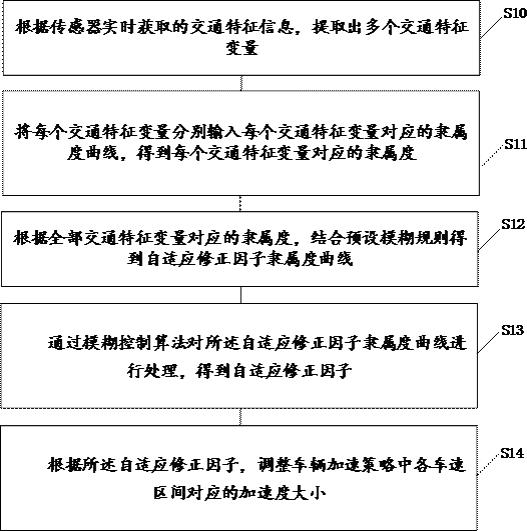
16.请参见图1,本发明一实施例提供了一种基于道路交通特征的车辆加速度控制方法,所述方法包括:s10、根据传感器实时获取的交通特征信息,提取出多个交通特征变量。
17.s11、将每个交通特征变量分别输入每个交通特征变量对应的隶属度曲线,得到每个交通特征变量对应的隶属度。
18.s12、根据全部交通特征变量对应的隶属度,结合预设模糊规则得到自适应修正因子隶属度曲线。
19.s13、通过模糊控制算法对所述自适应修正因子隶属度曲线进行处理,得到自适应修正因子。
20.s14、根据所述自适应修正因子,调整车辆加速策略中各车速区间对应的加速度大小;所述车辆加速策略是车辆系统控制器中调整车辆加速度的依据。
21.本发明实施例提供的车辆加速度控制方法适用于所有含有自适应巡航系统的车辆,或者是车辆控制器有自我调控功能的车辆。自适应巡航系统(adaptive cruise control,acc):通过对车辆纵向运动进行自动控制,以减轻驾驶员的劳动强度,保障行车安全,并通过方便的方式为驾驶员提过辅助支持。
22.本发明实施例流程主要包括三个方面,第一是信息获取放方面,在s10中利用毫米波雷达和摄像头等传感器获取周围环境信息,如:车间距离、车道线曲率和车速等;第二方面是进行信息提取和确认加速度调整策略,具体参见s11-s13;第三方面是依据车速划分不同工作车速段,设定不同加速度大小,并根据交通特征分析模块所得的自适应修正因子完成加速度大小的调整。在实际应用中,一般是将修正后的加速度发送至acc控制器进行车辆行驶控制。
23.相比于现有技术,本发明实施例提供的一种基于道路交通特征的车辆加速度控制方法及装置,利用毫米波雷达和摄像头等传感器获取周围环境信息并进行分析,得到多个交通特征变量,结合预设模糊规则得到自适应修正因子隶属度曲线,自适应修正因子隶属度曲线再结合模糊控制策略得到自适应修正因子,调整车辆加速策略中各车速区间对应的加速度大小,使车辆能够根据实时路况调整自身的加速度,适应各个环境的加减速要求,极大地增加了行车驾驶的安全性。
24.示例性地,所述多个交通特征变量包括车辆数量、车辆平均速度、车辆平均间距和道路曲率。
25.示例性地,所述每个交通特征变量对应的隶属度曲线是三角形函数曲线或者梯形函数曲线。
26.以车辆数量、车辆平均速度、车辆平均间距以及道路曲率为模糊控制算法的输入量,并选取自适应修正因子为输出量。针对输入量与输出量的隶属度函数,可选常用的三角型函数和梯形函数作为变量等级的表达。
27.需要说明的是,这里的模糊逻辑控制(fuzzy logic control),简称模糊控制(fuzzy control),是以模糊集合论、模糊语言变量和模糊逻辑推理为基础的一种计算机数字控制技术。
28.1)将车辆数量输入对应的隶属度曲线时,可通过三角函数和隶属度函数表示隶属度曲线:以三角型函数公式表示如下:
(1)以梯型函数公式表示如下:(2)其中和为不同的车辆数量,和为不同车辆数量所对应的隶属度。
29.2)将车辆平均速度输入对应的隶属度曲线时,可通过三角函数和隶属度函数表示隶属度曲线:以三角型函数公式表示如下:(3)以梯型函数公式表示如下:(4)其中和为不同的车辆平均速度,和为不同车辆平均速度所对应的隶属度。
30.3)将车辆平均间距输入对应的隶属度曲线时,可通过三角函数和隶属度函数表示隶属度曲线:以三角型函数公式表示如下:(5)以梯型函数公式表示如下:
(6)其中和为不同的车辆平均间距,和为不同车辆平均间距所对应的隶属度。
31.4)以道路曲率为输入量时,通过三角函数和隶属度函数表示隶属度曲线如下:以三角型函数公式表示如下:(7)以梯型函数公式表示如下:(8)其中和为不同的道路曲率,和为不同道路曲率所对应的隶属度。
32.示例性地,所述自适应修正因子隶属度曲线是三角形函数曲线或者梯形函数曲线。
33.通过三角函数和隶属度函数表示自适应修正因子隶属度曲线:以三角型函数公式表示如下:(9)以梯型函数公式表示如下:(10)其中和为自适应修正因子,和为不同自适应修正因子所对应的隶属度。
34.若每个交通特征变量对应的隶属度曲线和自适应修正因子隶属度曲线均采用三角形函数进行表示,那么将车辆数量设置为少、中和多三种等级,其对应的隶属度曲线通过公式
①
表示;将车辆平均车速设置为低、中和高三种等级,其对应的隶属度曲线通过公式
③
表示;将车辆平均间距设置为小、中和大三种等级,其对应的隶属度曲线通过公式
⑤
表示;将道路曲率设置为缓、中和急,其对应的隶属度曲线通过公式
⑦
表示。而对于输出量自适应修正因子设置为舒缓、舒适以及激烈三种加速期望等级,其对应的隶属度曲线通过公式
⑨
表示。然后,根据实际驾驶体验以及用户驾驶习惯调查,建立模糊控制规则。
35.示例性地,所述根据传感器实时获取的交通特征信息,提取出多个交通特征变量,具体包括:根据传感器实时获取预设时间内周围车辆信息以及道路信息,利用箱形图法分别统计多个交通特征变量数据的分布,并取每个交通特征变量数据的中位数作为每个交通特征变量的具体值。
36.需要说明是的,箱形图(box-plot)又称为盒须图、盒式图或箱线图,是一种用作显示一组数据分散情况资料的统计图。它能显示出一组数据的最大值、最小值、中位数、及上下四分位数。
37.示例性地,所述预设模糊规则需要根据对目标车辆的驾驶记录及目标车辆的用户驾驶习惯的调查进行设置。
38.示例性地,所述传感器包括毫米波雷达和前视摄像头;所述毫米波雷达用于获取道路上的车辆信息;所述前视摄像头用于获取车道线信息。
39.一般而言,采用毫米波雷达和前视摄像头已经能采集到上述发明实施例中所需要的周围车辆信息以及道路信息,在实际应用中,可以结合驾驶人需要、车辆驾驶环境以及车辆车型增添传感器从而获取更为全面的环境信息。
40.本发明实施例设计了一种自适应调整加速度大小的控制策略。在不同的驾驶环境下,利用传感器以及导航地图的信息确定车辆周围的交通特征,相应调整加速限制控制策略,从而提升自适应巡航控制系统适用性以及整车驾驶的安全性。
41.本技术还提供一种基于道路交通特征的车辆加速度控制装置实施例,所述装置包括交通信息获取模块20、道路交通分析模块21和加速度控制模块22。
42.交通信息获取模块20,用于根据传感器实时获取的交通特征信息,提取出多个交通特征变量;道路交通分析模块21,用于将每个交通特征变量分别输入每个交通特征变量对应的隶属度曲线,得到每个交通特征变量对应的隶属度。
43.所述道路交通分析模块21,还用于根据全部交通特征变量对应的隶属度,结合预设模糊规则得到自适应修正因子隶属度曲线。
44.所述道路交通分析模块21,还用于通过模糊控制算法对所述自适应修正因子隶属度曲线进行处理,得到自适应修正因子。
45.加速度控制模块22,用于根据所述自适应修正因子,调整车辆加速策略中各车速区间对应的加速度大小;所述车辆加速策略是车辆系统控制器中调整车辆加速度的依据。
46.所属领域的技术人员可以清楚地了解到,为描述的方便和简洁,上述描述的装置的具体工作过程,可以参考前述方法实施例中的对应过程,在此不再赞述。
47.相比于现有技术,本发明实施例提供的一种基于道路交通特征的车辆加速度控制装置,利用毫米波雷达和摄像头等传感器获取周围环境信息并进行分析,得到多个交通特征变量,结合预设模糊规则得到自适应修正因子隶属度曲线,自适应修正因子隶属度曲线再结合模糊控制策略得到自适应修正因子,调整车辆加速策略中各车速区间对应的加速度大小,使车辆能够根据实时路况调整自身的加速度,适应各个环境的加减速要求,极大地增加了行车驾驶的安全性。
48.以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本发明的保护范围。