1.本发明涉及一种用于对具有速度调节装置的运输工具的变道过程进行支持的方法和设备。
背景技术:
2.现代的运输工具装备有大量的辅助系统,这些辅助系统支持驾驶员对运输工具进行引导。例如,已知如下速度调节装置,这些速度调节装置将运输工具的速度调节到额定速度。还已知如下超越助理,这些超越助理能够支持驾驶员进行超越过程。
3.从de 101 14 187 a1中已知一种在具有间距和速度调节装置的机动车的情况下用于支持超越过程的方法,在该方法中也考虑到超越道上的运输工具并且如果利用传感器所检测到的交通状况或者驾驶员的干预可推断出超越愿望,则暂时调节到经提高的超越速度。在此情况下规定,测量与位于超越道上的运输工具的间距并且根据要超越的运输工具的间距和在超越道上的至少一个直接在前方行驶的运输工具的间距来计算超越速度。
4.然而,在目前还不能够令人满意地解决对于变道过程的支持。
技术实现要素:
5.本发明基于的任务在于,提出用于支持变道过程的方法和设备,其中能够以经改善的方式提供支持功能。
6.根据本发明,该任务通过具有专利权利要求1的特征的方法和具有专利权利要求7的特征的设备而得以解决。本发明的有利构型方案从从属权利要求中得出。
7.尤其是提供一种用于对具有速度调节装置的运输工具的变道过程进行支持的方法,其中该速度调节装置将运输工具的速度调节到额定速度,该方法包括以下步骤:借助输入装置接收该运输工具的环境的环境数据,其中所述环境数据至少包括关于在目标行驶道上的其他运输工具的信息;借助评估装置基于所述环境数据来确定在所述目标行驶道上的当前流速和当前交通密度;基于借助所述评估装置所确定的所述当前交通密度和所述当前流速来适配所述额定速度;将经适配的额定速度传递给所述速度调节装置。
8.还提出了一种用于对具有速度调节装置的运输工具的变道过程进行支持的设备,其中该速度调节装置将运输工具的速度调节到额定速度,其中该设备包括:输入装置,其中该输入装置构造用于,接收该运输工具的环境的环境数据,其中所述环境数据至少包括关于在目标行驶道上的其他运输工具的信息;评估装置,其中所述评估装置构造用于,基于所述环境数据来确定在所述目标行驶道上的当前流速和当前交通密度;并且基于所确定的所述当前交通密度和所述当前流速来适配所述额定速度,并且将经适配的额定速度传递给所述速度调节装置。
9.本发明的基本思想在于,根据所提供的环境数据来确定交通密度和当前流速,其中所述环境数据至少包括关于在目标行驶道上的其他运输工具的信息。可以例如将交通密度定义为每路段区段的运输工具或者每时间段的运输工具。该流速是在目标行驶道上的这
些运输工具的、例如在该运输工具的环境中的接下来的2个、5个或10个运输工具等等的中间速度、例如平均速度。根据所确定的当前交通密度和当前流速,然后适配该运输工具的速度调节装置的额定速度。如果规划例如在当前行驶道左侧的、作为目标行驶道的行驶道上的超越过程而在该目标行驶道上的这些运输工具具有比当前额定速度更大的流速,则将该额定速度调高到该流速并且接下来传递给速度调节装置。该运输工具然后加速并且能够变更到该目标行驶道上并且执行超越过程,而并不妨碍到该目标行驶道上的其他运输工具。在变道到该运输工具右侧延伸的行驶道上的情况下,可以相对应地将额定速度适配于更缓慢的流速,以避免撞上其他运输工具和/或突然进行减速。该适配尤其是在考虑最大容许的或最小容许的速度的情况下进行。
10.本发明的优点是:能够借助于所确定的交通密度和所确定的流速来获取经改善的环境映像。额定速度的适配因此能够以经改善的方式来执行。尤其是,考虑所有相关的、在该运输工具附近的位于目标行驶道上的运输工具、也即在该运输工具前方的其他运输工具以及在该运输工具后方的其他运输工具。在此情况下相关的是所有可能对目标行驶道上的流速和/或交通密度具有影响的运输工具。
11.所述环境数据可以尤其是传感器数据。在此情况下,考虑到全部已知的传感器,尤其是雷达、激光雷达、超声波和/或摄像机。所述环境数据也能够通过交通信息服务来提供并且例如已经包括关于该目标行驶道的流速和/或交通密度的信息。还可能通过云服务和/或car-2-x(车到外部)连接来提供环境数据。
12.该方法尤其是在开始变道过程时被执行。这可以例如是如下变道过程,该变道过程是由驾驶员手动开始的。还可以由半自动化控制的或自动化控制的运输工具来自动化地开始这种变道过程。
13.该运输工具可以尤其是机动车。然而,该运输工具也可以是运输机器人或者其他陆地运输工具、水上运输工具或空中运输工具。
14.在一种实施方式中规定,只有在目标行驶道上所确定的当前交通密度超出阈值的情况下才适配额定速度。如果交通密度例如仅仅很小,也即只有非常少量的其他运输工具位于该目标行驶道的路段区段上,那么将该运输工具的速度适配于目标行驶道上的其他运输工具的流速是较不重要的。在该目标行驶道上根本没有其他运输工具的情况下,也可以放弃额定速度的适配。由此可以减小能量消耗,因为可以防止不必要的加速或减速。
15.相对应地,在该设备中规定:该评估装置还构造用于,只有在目标行驶道上所确定的当前交通密度超出阈值的情况下才适配额定速度。
16.在另一种实施方式中规定:在存在至少一个复位标准的情况下将经适配的额定速度再次复位到之前有效的额定速度。这种复位标准可以例如是已过去了一定的持续时间。例如,可以在30秒之后或一分钟之后再次将额定速度复位。作为复位标准还考虑到运输工具的反馈。如果例如自动化地控制该运输工具,则可以在执行超越过程之后由运输工具的控制器生成如下反馈:超越过程已成功完成。然后,作为复位标准来检验该反馈是否存在。
17.在该设备中相应地规定:该评估装置还构造用于,在存在至少一个复位标准的情况下将经适配的额定速度再次复位到之前有效的额定速度。
18.在另一种实施方式中规定:在将经适配的额定速度传递给速度调节装置之后,借助人机接口对运输工具的驾驶员进行询问:是否经适配的额定速度应保持为持久设置,其
中与该询问结果相对应地保持设置为所述经适配的额定速度或者将所述经适配的额定速度复位。人机接口可以例如构造为具有用于保持或复位的按键的简单的信号发生器。然而,该人机接口也可以构造为显示和操作装置,在该显示和操作装置上示出相对应的会话并且请求驾驶员进行输入。
19.在该设备中相应地规定,该设备包括人机接口,其中该评估装置还构造用于,在将经适配的额定速度传递给速度调节装置之后借助人机接口对运输工具的驾驶员进行询问:是否经适配的额定速度应保持为持久设置,并且与该询问结果相对应地保持该额定速度或者将所述额定速度复位。
20.在一种扩展的实施方式中规定:基于至少一个询问结果来学习驾驶员偏好,其中接下来根据所学习的驾驶员偏好在不对驾驶员进行进一步询问的情况下保持或复位所述经适配的额定速度。例如可以规定:在保持额定速度三次的情况下,从此之后假定:该驾驶员在未来也要保持经适配的额定速度。相对应地,在未来放弃询问并且毫无疑问地保持所述经适配的额定速度。在学习中也考虑环境数据,从而能够将相应的环境一并考虑在内。
21.在该设备中相对应地规定:该评估装置还构造用于,基于至少一个询问结果来学习驾驶员偏好并且接下来根据所学习的驾驶员偏好在不对驾驶员进行进一步询问的情况下保持或复位所述经适配的额定速度。
22.替代地,也可以规定:该驾驶员一开始就可以设定:总是保持设置为经适配的额定速度或者替代地总是仅保持设置为经适配的额定速度直到复位标准的存在。
23.在另一种实施方式中规定:只有在经适配的额定速度在关于该运输工具的当前额定速度和/或当前实际速度的预给定的范围之内的情况下才适配该额定速度。该范围既可以以绝对方式又可以以相对方式来限定。例如可以规定:允许该经适配的额定速度与该运输工具的当前额定速度和/实际额定速度仅有+/
‑ꢀ
10%的偏差。
24.在该设备中相对应地规定:该评估装置还构造用于,只有在经适配的额定速度在关于该运输工具的当前额定速度和/或当前实际速度的预给定的范围之内的情况下才适配该额定速度。
附图说明
25.接下来,参考附图依据优选的实施例对本发明进一步进行阐述。在此情况下:图1示出用于支持变道过程的设备的实施方式的示意图;图2示出用于阐述本发明的一种实施方式的示意性流程图;图3示出用于阐述本发明的另一种实施方式的示意性流程图;图4示出用于阐述本发明的另一种实施方式的示意性流程图。
具体实施方式
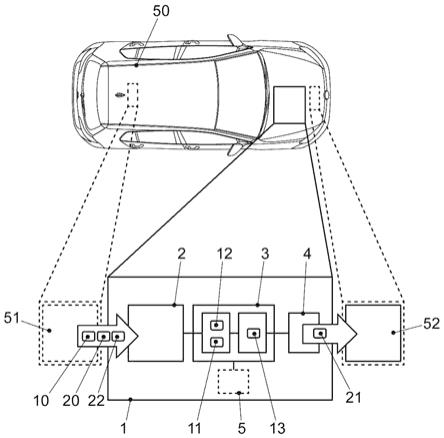
26.在图1中示出用于支持变道过程的设备1的实施方式的示意图。该设备1安装在运输工具50中,其中该运输工具构造为机动车。设备1包括输入装置2、评估装置3和输出装置4。
27.该运输工具50包括速度调节装置52,该速度调节装置将运输工具50的速度调节到额定速度20。该运输工具50还包括环境传感机构51,该环境传感机构检测、预处理和提供该
运输工具50的环境的环境数据10。该环境传感机构51例如经由数据总线系统、例如控制器局域网络(can)总线来向输入装置2提供环境数据10。此外,同样能够经由该数据总线系统来向该设备1提供当前额定速度20和当前实际速度22。
28.该输入装置2接收所提供的环境数据10,其中所述环境数据10至少包括关于在目标行驶道上的其他运输工具的信息。此外,也能够由输入装置2从交通信息服务和/或云服务或car-2-x(车到外部)连接询问和提供环境数据20。
29.该评估装置3基于所述环境数据10确定了在目标行驶道上的当前交通密度11和当前流速12。接下来,该评估装置3基于所确定的当前交通密度11和当前流速12来适配额定速度20,从而能够提供经适配的额定速度21。
30.所述经适配的额定速度21接下来由评估装置3传递给速度调节装置52。这通过输出装置4来进行,其中该输出装置例如通过数据总线系统来将经适配的额定速度21传递给速度调节装置52。该速度调节装置52于是用经适配的额定速度21来替代迄今为止的额定速度20。该运输工具50的速度接下来被速度调节装置52调节到经适配的额定速度21。
31.在图2中示出用于阐述本发明的示意性的流程图30。基于所接收的环境数据10,在第一方法步骤100中确定在目标行驶道上的当前流速12和交通密度11,其中所述环境数据10可以作为传感器数据31、交通信息数据32和/或云数据/car-2-x数据33而存在。接下来,在方法步骤101中,在考虑所述当前额定速度20和所述当前实际速度22 的情况下基于所述当前流速12和所述当前交通密度11来计算经适配的额定速度21。如果所述当前额定速度20例如小于所述流速12,则因此相对应地提高所述额定速度20。相反,如果所述当前额定速度20大于所述流速12,则因此相对应地减小所述额定速度20。
32.例如在计算当前额定速度与经适配的额定速度21的差时考虑当前实际速度22。如果所述经适配的额定速度21接近于当前实际速度22,那么结果可以是:相对应地更小程度地进行接下来的加速或减速,从而能够节省燃料。这可以在适配当前额定速度20时予以考虑。
33.经适配的额定速度21接下来在方法步骤102中被传递给运输工具的速度调节装置。该速度调节装置然后用经适配的额定速度21来替代该当前额定速度20。
34.可以规定:只有在目标行驶道上所确定的当前交通密度11超出阈值的情况下才适配额定速度20。例如,所述阈值可以定义每路段区段的或者每时间段的其他运输工具的特定数目。只有在超出该阈值的情况下,才适配所述额定速度20并且将经适配的额定速度21传递给速度调节装置。
35.还可以规定,在存在至少一个复位标准13(图1)的情况下将经适配的额定速度20再次复位到之前有效的额定速度20。这种复位标准13可以例如是已过去了预给定的持续时间。在已过去了预给定的持续时间之后,复位标准13被满足并且该评估装置3将经适配的额定速度21再次复位到初始的额定速度20。对此,该评估装置3相对应地将额定速度20的初始值作为经适配的额定速度21传递给运输工具50的速度调节装置52。替代地或附加地,作为复位标准13也可以使用已成功执行的超越过程。
36.还可以规定,在将经适配的额定速度21传递给速度调节装置之后,借助人机接口5(参见图1)对运输工具的驾驶员进行询问:是否经适配的额定速度21应保持为持久设置,其中与该询问结果相对应地保持设置为所述经适配的额定速度21或者将所述经适配的额定
速度21复位。这在图3中示意性地阐明,其中图3基本上与图2相对应。在将经适配的额定速度21传递给了速度调节装置之后,在该人机接口5处进行所述询问。根据询问结果而定,在方法步骤102中持久保持所述经适配的额定速度21或者在方法步骤103中通过将初始的额定速度20传递给速度调节装置来将所述经适配的额定速度21复位到初始设定的额定速度20。
37.在一种扩展方案中还可以规定:基于至少一个询问结果来学习驾驶员偏好,其中接下来根据所学习的驾驶员偏好在不对驾驶员进行进一步询问的情况下保持或复位所述经适配的额定速度21。这在图4中示意性地示出,其中图4基于图3。附加地执行方法步骤104,其中在所述方法步骤104中学习驾驶员偏好。这也可以在考虑环境数据10的情况下进行。一旦学习了驾驶员偏好,就不再执行对驾驶员的询问以及方法步骤102、103。
38.可以规定,只有在所述经适配的额定速度21在关于该运输工具的当前额定速度20和/或当前实际速度22的预给定的范围之内的情况下才适配该额定速度20。
39.附图标记列表1 设备2 输入装置3评估装置4输出装置5人机接口10 环境数据11 当前交通密度12当前流速13 复位标准20 当前额定速度21 经适配的额定速度22当前实际速度30 信息流图31 传感器数据32 交通信息33 云数据/car-2-x数据50 运输工具51 环境传感机构52 速度调节装置100-104 方法步骤