基于uwb的有轨电车的车载信号系统的更新方法及系统
技术领域
1.本技术涉及有轨电车技术领域,具体涉及一种基于uwb的有轨电车的车载信号系统的更新方法及系统。
背景技术:
2.车载信号系统属于有轨电车的核心部分,其通常包括车载控制主机以及与车载控制主机连接的车-地通信设备、卫星定位系统、道岔控制器、环线收发器以及车载驾驶室人机界面(mmi)等。在有轨电车行驶途中,上层的调度指挥中心可以通过与有轨电车的车载信号系统中的车-地通信设备的通信连接对车载信号系统进行更新,例如对车载信号系统中的道岔控制器的指令更新、车载驾驶室人机界面(mmi)的版本更新等。然而,在实践中发现,在有轨电车的车载信号系统中的车-地通信设备出现故障时,调度指挥中心无法在有轨电车行驶途中对有轨电车的车载信号系统进行更新,不利于提升有轨电车行驶途中的安全性。
技术实现要素:
3.为了克服上述技术缺陷,本技术实施例公开了一种基于uwb的有轨电车的车载信号系统的更新方法及系统。
4.本技术实施例第一方面公开一种基于uwb的有轨电车的车载信号系统的更新方法,其中,多个uwb道旁设备沿着有轨电车轨道的长度方向间隔的设置在所述有轨电车轨道的轨道旁,并且每一所述uwb道旁设备上设置有第一uwb天线,所述方法包括:
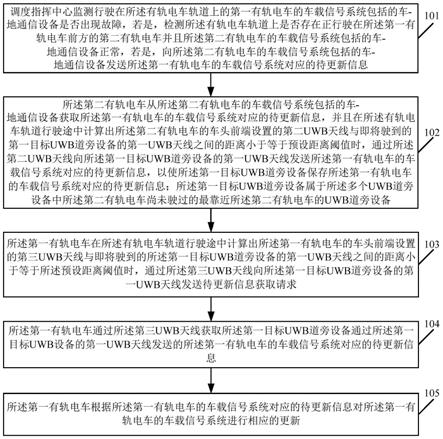
5.调度指挥中心监测行驶在所述有轨电车轨道上的第一有轨电车的车载信号系统包括的车-地通信设备是否出现故障,若是,检测所述有轨电车轨道上是否存在正行驶在所述第一有轨电车前方的第二有轨电车并且所述第二有轨电车的车载信号系统包括的车-地通信设备正常,若是,向所述第二有轨电车的车载信号系统包括的车-地通信设备发送所述第一有轨电车的车载信号系统对应的待更新信息;
6.所述第二有轨电车从所述第二有轨电车的车载信号系统包括的车-地通信设备获取所述第一有轨电车的车载信号系统对应的待更新信息,并且在所述有轨电车轨道行驶途中计算出所述第二有轨电车的车头前端设置的第二 uwb天线与即将驶到的第一目标uwb道旁设备的第一uwb天线之间的距离小于等于预设距离阈值时,通过所述第二uwb天线向所述第一目标uwb 道旁设备的第一uwb天线发送所述第一有轨电车的车载信号系统对应的待更新信息,以使所述第一目标uwb道旁设备保存所述第一有轨电车的车载信号系统对应的待更新信息;所述第一目标uwb道旁设备属于所述多个 uwb道旁设备中所述第二有轨电车尚未驶过的最靠近所述第二有轨电车的 uwb道旁设备;
7.所述第一有轨电车在所述有轨电车轨道行驶途中计算出所述第一有轨电车的车头前端设置的第三uwb天线与即将驶到的所述第一目标uwb道旁设备的第一uwb天线之间的距离小于等于所述预设距离阈值时,通过所述第三uwb天线向所述第一目标uwb道旁设备的
第一uwb天线发送待更新信息获取请求;
8.所述第一有轨电车通过所述第三uwb天线获取所述第一目标uwb道旁设备通过所述第一目标uwb设备的第一uwb天线发送的所述第一有轨电车的车载信号系统对应的待更新信息;
9.所述第一有轨电车根据所述第一有轨电车的车载信号系统对应的待更新信息对所述第一有轨电车的车载信号系统进行相应的更新。
10.作为一种可选的实施方式,在本技术实施例第一方面中,在所述第一有轨电车根据所述第一有轨电车的车载信号系统对应的待更新信息对所述第一有轨电车的车载信号系统进行相应的更新之后,所述方法还包括:
11.所述第一有轨电车在所述有轨电车轨道行驶途中计算出所述第三uwb 天线与即将驶到的第二目标uwb道旁设备的第一uwb天线之间的距离小于等于所述预设距离阈值时,通过所述第三uwb天线向所述第二目标uwb 道旁设备的第一uwb天线发送所述第一有轨电车的车载信号系统更新完毕响应信息,以使所述第二目标uwb道旁设备保存所述第一有轨电车的车载信号系统更新完毕响应信息;其中,所述第二目标uwb道旁设备是所述多个uwb道旁设备中的、在所述第一有轨电车的行驶方向上位于所述第一目标uwb道旁设备的前方且最靠近所述第一目标uwb道旁设备的另一uwb 道旁设备;
12.第三有轨电车在所述有轨电车轨道行驶途中计算出所述第三有轨电车的车头前端设置的第四uwb天线与即将驶到的所述第二目标uwb道旁设备的第一uwb天线之间的距离小于等于所述预设距离阈值时,通过所述第四uwb天线向所述第二目标uwb道旁设备的第一uwb天线发送信息获取指令;其中,所述第三有轨电车正行驶在所述有轨电车轨道上并位于所述第一有轨电车的后方;
13.所述第三有轨电车通过所述第四uwb天线获取所述第二目标uwb道旁设备根据所述信息获取请求通过所述第二目标uwb道旁设备的第一 uwb天线发送的所述第一有轨电车的车载信号系统更新完毕响应信息;
14.所述第三有轨电车通过所述第三有轨电车的车载信号系统包括的车-地通信设备向所述调度指挥中心上报所述第一有轨电车的车载信号系统更新完毕响应信息。
15.本技术实施例第二方面公开一种基于uwb的有轨电车的车载信号系统的更新系统,至少包括调度指挥中心、第一有轨电、第二有轨电车以及多个 uwb道旁设备,所述多个uwb道旁设备沿着有轨电车轨道的长度方向间隔的设置在所述有轨电车轨道的轨道旁,并且每一所述uwb道旁设备上设置有第一uwb天线,其中:
16.所述调度指挥中心,用于监测行驶在所述有轨电车轨道上的所述第一有轨电车的车载信号系统包括的车-地通信设备是否出现故障,若是,检测所述有轨电车轨道上是否存在正行驶在所述第一有轨电车前方的所述第二有轨电车并且所述第二有轨电车的车载信号系统包括的车-地通信设备正常,若是,向所述第二有轨电车的车载信号系统包括的车-地通信设备发送所述第一有轨电车的车载信号系统对应的待更新信息;
17.所述第二有轨电车,用于从所述第二有轨电车的车载信号系统包括的车
ꢀ‑
地通信设备获取所述第一有轨电车的车载信号系统对应的待更新信息,并且在所述有轨电车轨道行驶途中计算出所述第二有轨电车的车头前端设置的第二uwb天线与即将驶到的第一目标uwb道旁设备的第一uwb天线之间的距离小于等于预设距离阈值时,通过所述第二uwb天线
向所述第一目标 uwb道旁设备的第一uwb天线发送所述第一有轨电车的车载信号系统对应的待更新信息,以使所述第一目标uwb道旁设备保存所述第一有轨电车的车载信号系统对应的待更新信息;所述第一目标uwb道旁设备属于所述多个uwb道旁设备中所述第二有轨电车尚未驶过的最靠近所述第二有轨电车的uwb道旁设备;
18.所述第一有轨电车,用于在所述有轨电车轨道行驶途中计算出所述第一有轨电车的车头前端设置的第三uwb天线与即将驶到的所述第一目标 uwb道旁设备的第一uwb天线之间的距离小于等于所述预设距离阈值时,通过所述第三uwb天线向所述第一目标uwb道旁设备的第一uwb天线发送待更新信息获取请求;
19.所述第一有轨电车,还用于通过所述第三uwb天线获取所述第一目标 uwb道旁设备通过所述第一目标uwb设备的第一uwb天线发送的所述第一有轨电车的车载信号系统对应的待更新信息;
20.所述第一有轨电车,还用于根据所述第一有轨电车的车载信号系统对应的待更新信息对所述第一有轨电车的车载信号系统进行相应的更新。
21.作为一种可选的实施方式,在本技术实施例第二方面中,所述基于uwb 的有轨电车的车载信号系统的更新系统还包括第三有轨电车,所述第三有轨电车正行驶在所述有轨电车轨道上并位于所述第一有轨电车的后方,其中;
22.所述第一有轨电车,还用于在根据所述第一有轨电车的车载信号系统对应的待更新信息对所述第一有轨电车的车载信号系统进行相应的更新之后,以及在所述有轨电车轨道行驶途中计算出所述第三uwb天线与即将驶到的第二目标uwb道旁设备的第一uwb天线之间的距离小于等于所述预设距离阈值时,通过所述第三uwb天线向所述第二目标uwb道旁设备的第一 uwb天线发送所述第一有轨电车的车载信号系统更新完毕响应信息,以使所述第二目标uwb道旁设备保存所述第一有轨电车的车载信号系统更新完毕响应信息;其中,所述第二目标uwb道旁设备是所述多个uwb道旁设备中的、在所述第一有轨电车的行驶方向上位于所述第一目标uwb道旁设备的前方且最靠近所述第一目标uwb道旁设备的另一uwb道旁设备;
23.所述第三有轨电车,用于在所述有轨电车轨道行驶途中计算出所述第三有轨电车的车头前端设置的第四uwb天线与即将驶到的所述第二目标 uwb道旁设备的第一uwb天线之间的距离小于等于所述预设距离阈值时,通过所述第四uwb天线向所述第二目标uwb道旁设备的第一uwb天线发送信息获取指令;
24.所述第三有轨电车,还用于通过所述第四uwb天线获取所述第二目标 uwb道旁设备根据所述信息获取请求通过所述第二目标uwb道旁设备的第一uwb天线发送的所述第一有轨电车的车载信号系统更新完毕响应信息;
25.所述第三有轨电车,还用于通过所述第三有轨电车的车载信号系统包括的车-地通信设备向所述调度指挥中心上报所述第一有轨电车的车载信号系统更新完毕响应信息。
26.与现有技术相比,本技术实施例具有以下有益效果:
27.本技术实施例中,调度指挥中心在监测到行驶在有轨电车轨道上的第一有轨电车的车载信号系统包括的车-地通信设备出现故障时,通过正行驶在在第一有轨电车前方的第二有轨电车的uwb天线将第一有轨电车的车载信号系统对应的待更新信息发送至位于轨道旁的第一目标uwb道旁设备进行保存,使第一有轨电车通过其uwb天线从第一目标uwb道
旁设备获取第一有轨电车的车载信号系统对应的待更新信息进行相应的更新。实施本技术实施例,即使有轨电车的车载信号系统中的车-地通信设备出现故障,也能够在有轨电车行驶途中对有轨电车的车载信号系统进行更新,从而有利于提升有轨电车行驶途中的安全性。
附图说明
28.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
29.图1是本技术实施例公开的基于uwb的有轨电车的车载信号系统的更新方法的第一实施例的流程示意图;
30.图2是本技术实施例公开的基于uwb的有轨电车的车载信号系统的更新方法的第二实施例的流程示意图;
31.图3是本技术实施例公开的基于uwb的有轨电车的车载信号系统的更新系统的架构示意图。
具体实施方式
32.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
33.需要说明的是,本技术实施例的术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
34.本技术实施例公开了一种基于uwb的有轨电车的车载信号系统的更新方法及系统,以下进行结合附图进行详细描述。
35.请参阅图1,图1是本技术实施例公开的基于uwb的有轨电车的车载信号系统的更新方法的第一实施例的流程示意图。在第一实施例中,多个 uwb(超宽带)道旁设备沿着有轨电车轨道的长度方向间隔的设置在所述有轨电车轨道的轨道旁,并且每一所述uwb道旁设备上设置有第一uwb天线。如图1所示,所述基于uwb的有轨电车的车载信号系统的更新方法可以包括以下步骤:
36.101、调度指挥中心监测行驶在所述有轨电车轨道上的第一有轨电车的车载信号系统包括的车-地通信设备是否出现故障,若是,检测所述有轨电车轨道上是否存在正行驶在所述第一有轨电车前方的第二有轨电车并且所述第二有轨电车的车载信号系统包括的车-地通信设备正常,若是,向所述第二有轨电车的车载信号系统包括的车-地通信设备发送所述第一有轨电车的车载信号系统对应的待更新信息。
37.示例性的,调度指挥中心可以监测行驶在所述有轨电车轨道上的第一有轨电车的
车载信号系统包括的车-地通信设备与所述调度指挥中心之间的心跳连接是否中断,若中断,可以确定出所述第一有轨电车的车载信号系统包括的车-地通信设备出现故障;反之,若未中断,可以确定出所述第一有轨电车的车载信号系统包括的车-地通信设备正常(即未出现故障)。
38.示例性的,所述第一有轨电车的车载信号系统对应的待更新信息可以包括所述第一有轨电车的车载信号系统中的道岔控制器的待更新指令、车载驾驶室人机界面(mmi)的待更新版本等等。
39.102、所述第二有轨电车从所述第二有轨电车的车载信号系统包括的车
‑ꢀ
地通信设备获取所述第一有轨电车的车载信号系统对应的待更新信息,并且在所述有轨电车轨道行驶途中计算出所述第二有轨电车的车头前端设置的第二uwb天线与即将驶到的第一目标uwb道旁设备的第一uwb天线之间的距离小于等于预设距离阈值时,通过所述第二uwb天线向所述第一目标 uwb道旁设备的第一uwb天线发送所述第一有轨电车的车载信号系统对应的待更新信息,以使所述第一目标uwb道旁设备保存所述第一有轨电车的车载信号系统对应的待更新信息;所述第一目标uwb道旁设备属于所述多个uwb道旁设备中所述第二有轨电车尚未驶过的最靠近所述第二有轨电车的uwb道旁设备。
40.本技术实施例中,所述第二有轨电车在所述有轨电车轨道行驶途中可以利用uwb(超宽带)技术计算出所述第二有轨电车的车头前端设置的第二 uwb天线与即将驶到的第一目标uwb道旁设备的第一uwb天线之间的距离,并且在判断出所述距离小于等于预设距离阈值时,通过所述第二uwb 天线向所述第一目标uwb道旁设备的第一uwb天线发送所述第一有轨电车的车载信号系统对应的待更新信息。其中,uwb技术主要有3大特点,一是定位速度非常快、定位精度高;二是可以精确计算出两个uwb天线的距离;三是uwb具有高带宽的特点,可以支持数据及音视频等信号的快速传输。
41.其中,所述预设距离阈值可以根据实际需要进行设置,本技术实施例不作具体限定。
42.103、所述第一有轨电车在所述有轨电车轨道行驶途中计算出所述第一有轨电车的车头前端设置的第三uwb天线与即将驶到的所述第一目标 uwb道旁设备的第一uwb天线之间的距离小于等于所述预设距离阈值时,通过所述第三uwb天线向所述第一目标uwb道旁设备的第一uwb天线发送待更新信息获取请求。
43.104、所述第一有轨电车通过所述第三uwb天线获取所述第一目标 uwb道旁设备通过所述第一目标uwb设备的第一uwb天线发送的所述第一有轨电车的车载信号系统对应的待更新信息。
44.105、所述第一有轨电车根据所述第一有轨电车的车载信号系统对应的待更新信息对所述第一有轨电车的车载信号系统进行相应的更新。
45.需要说明的是,所述第一有轨电车根据所述第一有轨电车的车载信号系统对应的待更新信息对所述第一有轨电车的车载信号系统进行相应的更新时不影响所述第一有轨电车在所述有轨电车轨道上的正常行驶。
46.示例性的,当所述待更新信息是所述第一有轨电车的车载信号系统中的道岔控制器的更新指令时,所述第一有轨电车可以根据所述道岔控制器的更新指令对所述第一有轨电车的车载信号系统中的道岔控制器进行指令更新;其中,所述第一有轨电车可以在所述
第一有轨电车进行道岔控制之前,根据所述道岔控制器的更新指令对所述第一有轨电车的车载信号系统中的道岔控制器进行指令更新,这一过程不影响所述第一有轨电车在所述有轨电车轨道上的正常行驶。
47.可见,实施图1所描述的方法,即使第一有轨电车的车载信号系统中的车-地通信设备出现故障,也能够在第一有轨电车行驶途中对第一有轨电车的车载信号系统进行更新,从而有利于提升有轨电车行驶途中的安全性。
48.请参阅图2,图2是本技术实施例公开的基于uwb的有轨电车的车载信号系统的更新方法的第二实施例的流程示意图。在第二实施例中,多个uwb道旁设备沿着有轨电车轨道的长度方向间隔的设置在所述有轨电车轨道的轨道旁,并且每一所述uwb道旁设备上设置有第一uwb天线。如图2 所示,所述基于uwb的有轨电车的车载信号系统的更新方法可以包括以下步骤:
49.201、调度指挥中心监测行驶在所述有轨电车轨道上的第一有轨电车的车载信号系统包括的车-地通信设备是否出现故障,若是,检测所述有轨电车轨道上是否存在正行驶在所述第一有轨电车前方的第二有轨电车并且所述第二有轨电车的车载信号系统包括的车-地通信设备正常,若是,向所述第二有轨电车的车载信号系统包括的车-地通信设备发送所述第一有轨电车的车载信号系统对应的待更新信息。
50.作为一种可选的实施方式,所述调度指挥中心监测出行驶在所述有轨电车轨道上的第一有轨电车的车载信号系统包括的车-地通信设备出现故障之后,所述调度指挥中心可以进一步确定本地数据库中是否存在有所述第一有轨电车的车载信号系统对应的待更新信息,若不存在,结束本流程;若存在,执行所述的检测所述有轨电车轨道上是否存在正行驶在所述第一有轨电车前方的第二有轨电车并且所述第二有轨电车的车载信号系统包括的车-地通信设备正常的步骤。
51.202、所述第二有轨电车从所述第二有轨电车的车载信号系统包括的车
‑ꢀ
地通信设备获取所述第一有轨电车的车载信号系统对应的待更新信息,并且在所述有轨电车轨道行驶途中计算出所述第二有轨电车的车头前端设置的第二uwb天线与即将驶到的第一目标uwb道旁设备的第一uwb天线之间的距离小于等于预设距离阈值时,通过所述第二uwb天线向所述第一目标 uwb道旁设备的第一uwb天线发送所述第一有轨电车的车载信号系统对应的待更新信息,以使所述第一目标uwb道旁设备保存所述第一有轨电车的车载信号系统对应的待更新信息;所述第一目标uwb道旁设备属于所述多个uwb道旁设备中所述第二有轨电车尚未驶过的最靠近所述第二有轨电车的uwb道旁设备。
52.203、所述第一有轨电车在所述有轨电车轨道行驶途中计算出所述第一有轨电车的车头前端设置的第三uwb天线与即将驶到的所述第一目标uwb道旁设备的第一uwb天线之间的距离小于等于所述预设距离阈值时,通过所述第三uwb天线向所述第一目标uwb道旁设备的第一uwb天线发送待更新信息获取请求。
53.204、所述第一有轨电车通过所述第三uwb天线获取所述第一目标 uwb道旁设备通过所述第一目标uwb设备的第一uwb天线发送的所述第一有轨电车的车载信号系统对应的待更新信息。
54.205、所述第一有轨电车根据所述第一有轨电车的车载信号系统对应的待更新信息对所述第一有轨电车的车载信号系统进行相应的更新。
55.206、所述第一有轨电车在所述有轨电车轨道行驶途中计算出所述第三 uwb天线与即将驶到的第二目标uwb道旁设备的第一uwb天线之间的距离小于等于所述预设距离阈值时,通过所述第三uwb天线向所述第二目标 uwb道旁设备的第一uwb天线发送所述第一有轨电车的车载信号系统更新完毕响应信息,以使所述第二目标uwb道旁设备保存所述第一有轨电车的车载信号系统更新完毕响应信息;其中,所述第二目标uwb道旁设备是所述多个uwb道旁设备中的、在所述第一有轨电车的行驶方向上位于所述第一目标uwb道旁设备的前方且最靠近所述第一目标uwb道旁设备的另一uwb道旁设备。
56.207、第三有轨电车在所述有轨电车轨道行驶途中计算出所述第三有轨电车的车头前端设置的第四uwb天线与即将驶到的所述第二目标uwb道旁设备的第一uwb天线之间的距离小于等于所述预设距离阈值时,通过所述第四uwb天线向所述第二目标uwb道旁设备的第一uwb天线发送信息获取指令;其中,所述第三有轨电车正行驶在所述有轨电车轨道上并位于所述第一有轨电车的后方。
57.208、所述第三有轨电车通过所述第四uwb天线获取所述第二目标 uwb道旁设备根据所述信息获取请求通过所述第二目标uwb道旁设备的第一uwb天线发送的所述第一有轨电车的车载信号系统更新完毕响应信息。
58.209、所述第三有轨电车通过所述第三有轨电车的车载信号系统包括的车-地通信设备向所述调度指挥中心上报所述第一有轨电车的车载信号系统更新完毕响应信息。
59.作为一种可选的实施方式,所述第三有轨电车通过所述第四uwb天线获取所述第二目标uwb道旁设备根据所述信息获取请求通过所述第二目标 uwb道旁设备的第一uwb天线发送的所述第一有轨电车的车载信号系统更新完毕响应信息之后,还可以执行以下步骤:
60.所述第三有轨电车检测所述第三有轨电车的车载信号系统包括的车-地通信设备是否正常,若正常,执行步骤209;反之,所述第三有轨电车若检测出所述第三有轨电车的车载信号系统包括的车-地通信设备不正常,则可以丢弃所述第一有轨电车的车载信号系统更新完毕响应信息。
61.其中,实施上述步骤206-步骤209可以借助正行驶在所述有轨电车轨道上并位于所述第一有轨电车的后方的所述第三有轨电车的车载信号系统包括的车-地通信设备向所述调度指挥中心上报所述第一有轨电车的车载信号系统更新完毕响应信息,从而使得在所述第一有轨电车的车载信号系统中的车
‑ꢀ
地通信设备出现故障时,所述调度指挥中心也可以尽快获悉所述第一有轨电车的车载信号系统更新完毕,从而可以避免在有轨电车行驶途中反复的对所述有轨电车的车载信号系统进行相同的配置,有利于提升有轨电车行驶途中的安全性。
62.可见,实施图2所描述的方法,即使第一有轨电车的车载信号系统中的车-地通信设备出现故障,也能够在第一有轨电车行驶途中对第一有轨电车的车载信号系统进行更新,从而有利于提升有轨电车行驶途中的安全性。此外,实施图2所描述的方法可以避免在有轨电车行驶途中反复的对所述有轨电车的车载信号系统进行相同的配置,有利于提升有轨电车行驶途中的安全性。
63.请参阅图3,图3是本技术实施例公开的基于uwb的有轨电车的车载信号系统的更新系统的架构示意图。如图3所示,所述更新系统至少包括调度指挥中心301、第一有轨电车
302、第二有轨电车303以及多个uwb道旁设备304,所述多个uwb道旁设备304沿着有轨电车轨道的长度方向间隔的设置在所述有轨电车轨道的轨道旁,并且每一所述uwb道旁设备304上设置有第一uwb天线,其中:
64.所述调度指挥中心301,用于监测行驶在所述有轨电车轨道上的所述第一有轨电车302的车载信号系统包括的车-地通信设备是否出现故障,若是,检测所述有轨电车轨道上是否存在正行驶在所述第一有轨电车302前方的所述第二有轨电车303并且所述第二有轨电车303的车载信号系统包括的车
‑ꢀ
地通信设备正常,若是,向所述第二有轨电车303的车载信号系统包括的车
‑ꢀ
地通信设备发送所述第一有轨电车302的车载信号系统对应的待更新信息;
65.所述第二有轨电车303,用于从所述第二有轨电车303的车载信号系统包括的车-地通信设备获取所述第一有轨电车302的车载信号系统对应的待更新信息,并且在所述有轨电车轨道行驶途中计算出所述第二有轨电车303 的车头前端设置的第二uwb天线与即将驶到的第一目标uwb道旁设备的第一uwb天线之间的距离小于等于预设距离阈值时,通过所述第二uwb 天线向所述第一目标uwb道旁设备的第一uwb天线发送所述第一有轨电车302的车载信号系统对应的待更新信息,以使所述第一目标uwb道旁设备保存所述第一有轨电车302的车载信号系统对应的待更新信息;所述第一目标uwb道旁设备属于所述多个uwb道旁设备304中所述第二有轨电车 303尚未驶过的最靠近所述第二有轨电车303的uwb道旁设备;
66.所述第一有轨电车302,用于在所述有轨电车轨道行驶途中计算出所述第一有轨电车302的车头前端设置的第三uwb天线与即将驶到的所述第一目标uwb道旁设备的第一uwb天线之间的距离小于等于所述预设距离阈值时,通过所述第三uwb天线向所述第一目标uwb道旁设备的第一uwb 天线发送待更新信息获取请求;
67.所述第一有轨电车302,还用于通过所述第三uwb天线获取所述第一目标uwb道旁设备通过所述第一目标uwb设备的第一uwb天线发送的所述第一有轨电车302的车载信号系统对应的待更新信息;
68.所述第一有轨电车302,还用于根据所述第一有轨电车302的车载信号系统对应的待更新信息对所述第一有轨电车302的车载信号系统进行相应的更新。
69.作为一种可选的实施方式,在图3所描述的基于uwb的有轨电车的车载信号系统的更新系统中,所述调度指挥中心301监测出行驶在所述有轨电车轨道上的第一有轨电车302的车载信号系统包括的车-地通信设备出现故障之后,还用于:
70.确定本地数据库中是否存在有所述第一有轨电车302的车载信号系统对应的待更新信息,若存在,执行所述的检测所述有轨电车轨道上是否存在正行驶在所述第一有轨电车302前方的所述第二有轨电车303并且所述第二有轨电车303的车载信号系统包括的车-地通信设备正常的步骤。
71.作为另一种可选的实施方式,在图3所描述的基于uwb的有轨电车的车载信号系统的更新系统中,还包括第三有轨电车305,所述第三有轨电车 305正行驶在所述有轨电车轨道上并位于所述第一有轨电车302的后方,其中;
72.所述第一有轨电车302,还用于在根据所述第一有轨电车302的车载信号系统对应的待更新信息对所述第一有轨电车302的车载信号系统进行相应的更新之后,以及在所述
有轨电车轨道行驶途中计算出所述第三uwb天线与即将驶到的第二目标uwb道旁设备的第一uwb天线之间的距离小于等于所述预设距离阈值时,通过所述第三uwb天线向所述第二目标uwb道旁设备的第一uwb天线发送所述第一有轨电车302的车载信号系统更新完毕响应信息,以使所述第二目标uwb道旁设备保存所述第一有轨电车的车载信号系统更新完毕响应信息;其中,所述第二目标uwb道旁设备是所述多个uwb道旁设备中的、在所述第一有轨电车302的行驶方向上位于所述第一目标uwb道旁设备的前方且最靠近所述第一目标uwb道旁设备的另一uwb道旁设备;
73.所述第三有轨电车305,用于在所述有轨电车轨道行驶途中计算出所述第三有轨电车305的车头前端设置的第四uwb天线与即将驶到的所述第二目标uwb道旁设备的第一uwb天线之间的距离小于等于所述预设距离阈值时,通过所述第四uwb天线向所述第二目标uwb道旁设备的第一uwb 天线发送信息获取指令;
74.所述第三有轨电车305,还用于通过所述第四uwb天线获取所述第二目标uwb道旁设备根据所述信息获取请求通过所述第二目标uwb道旁设备的第一uwb天线发送的所述第一有轨电车302的车载信号系统更新完毕响应信息;
75.所述第三有轨电车305,还用于通过所述第三有轨电车305的车载信号系统包括的车-地通信设备向所述调度指挥中心301上报所述第一有轨电车的车载信号系统更新完毕响应信息。
76.作为另一种可选的实施方式,在图3所描述的基于uwb的有轨电车的车载信号系统的更新系统中,所述第三有轨电车305通过所述第四uwb天线获取所述第二目标uwb道旁设备根据所述信息获取请求通过所述第二目标uwb道旁设备的第一uwb天线发送的所述第一有轨电车302的车载信号系统更新完毕响应信息之后,还用于:
77.检测所述第三有轨电车305的车载信号系统包括的车-地通信设备是否正常,若正常,执行所述的通过所述第三有轨电车305的车载信号系统包括的车-地通信设备向所述调度指挥中心301上报所述第一有轨电车302的车载信号系统更新完毕响应信息的步骤。
78.作为另一种可选的实施方式,在图3所描述的基于uwb的有轨电车的车载信号系统的更新系统中:
79.所述第三有轨电车305,还用于若检测出所述第三有轨电车305的车载信号系统包括的车-地通信设备不正常,则丢弃所述第一有轨电车302的车载信号系统更新完毕响应信息。
80.可见,实施图3所描述的系统,即使有轨电车的车载信号系统中的车
‑ꢀ
地通信设备出现故障,也能够在有轨电车行驶途中对有轨电车的车载信号系统进行配置,从而有利于提升有轨电车行驶途中的安全性。此外,实施图3 所描述的系统,可以避免在有轨电车行驶途中反复的对所述有轨电车的车载信号系统进行相同的配置,有利于提升有轨电车行驶途中的安全性。
81.本技术实施例公开一种计算机可读存储介质,其存储计算机程序,其中,该计算机程序被处理器执行时实现以上各方法实施例中的部分或全部步骤。本技术实施例公开一种计算机程序产品,其中,当计算机程序产品在计算机上运行时,使得计算机执行如以上各方法实施例中的部分或全部步骤。
82.本技术实施例公开一种应用发布平台,该应用发布平台用于发布计算机程序产
品,其中,当上述计算机程序产品在计算机上运行时,使得计算机执行如以上各方法实施例中的方法的部分或全部步骤。
83.本领域普通技术人员可以理解上述实施例的各种方法中的全部或部分步骤是可以通过程序来指令相关的硬件来完成,该程序可以存储于一计算机可读存储介质中,存储介质包括只读存储器(rom)、随机存储器(ram)、可编程只读存储器(prom)、可擦除可编程只读存储器(eprom)、一次可编程只读存储器(otprom)、电子抹除式可复写只读存储器eeprom)、只读光盘(cd-rom)或其他光盘存储器、磁盘存储器、磁带存储器、或者能够用于携带或存储数据的计算机可读的任何其他介质。
84.以上对本技术实施例公开的一种基于uwb的有轨电车的车载信号系统的更新方法及系统进行了详细介绍,本文中应用了具体个例对本技术的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本技术的方法及其核心思想;同时,对于本领域的一般技术人员,合法依据本技术的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本技术的限制。