1.本发明涉及铁路控制技术领域,特别是涉及一种调速器、编组站调速装置及方法。
背景技术:
2.近年来,铁路货运量越来越大,编组站的工作效率急需提高,而调速装置是提高效率最有效的途径。现有调速装置多为钳夹式减速器、加减速顶、加速小车等,其中钳夹式减速器只有点式减速功能,噪音巨大且对轮对有磨耗,且动作滞后,影响编组站工作人员工作环境;加减速顶存在制动力小且为点式调速,减速大小不可控等缺点;加速小车存在只能加速,只在目的调速时使用等缺点。此外由于各种调速装置要么不能实现加速、要么不能控制大小,编组站一旦建设好再提高效率就很难,不容易改造。
3.申请号为“201820303729.x”,名称为“一种铁路驼峰车辆电磁减速器系统装置”的实用新型专利,解决了噪音问题,说明书中提及该专利减速原理是:“给励磁线圈通以直流电,磁轭中间产生恒定的磁场,磁轭中间产生恒定的磁场,旋转的列车轮对快速经过磁场,由于楞次定律,在轮对上存在许多反向小的感应励磁电流来阻碍轮对中磁场的变化,电流方向可用右手螺旋定则判断,轮对速度越大磁场变化越快,产生的这种反向励磁电流越大,这种小的励磁电流也属于电流的一种,因此根据左手定则可以知道励磁电流产生的力的方向,分析结果发现这种励磁电流产生的力可以阻碍轮对运行,这就是电磁涡流减速器的减速原理。”利用的是车轮切割磁感线产生阻力的原理,阻力较小,属于点式调速,只有经过装置才有效,也决定了其不能实现加速功能;申请号为“202011226819.1”,名称为“一种永磁励磁的驼峰车辆减速器”的专利中,同样利用电磁涡流实现减速,但还需要用气缸控制,会有少许噪声,也不能实现加速功能等。如何提供一种既能实现加速也能实现减速,且噪声小的减速装置成为一个亟待解决的技术问题。
技术实现要素:
4.本发明的目的是提供一种调速器、编组站调速装置及方法,以提供一种既能实现加速也能实现减速,且噪声小的减速装置。
5.为实现上述目的,本发明提供了如下方案:
6.本发明提供一种调速器,所述调速器包括:电机、铁心、线圈;
7.所述电机与所述铁心的一端轴连接,所述线圈缠绕在所述铁心的外部;
8.所述电机用于调整所述铁心的方向。
9.可选的,所述调速器还包括码盘,所述码盘设置在所述电机的输出轴上,所述码盘用于测量所述电机的转角。
10.可选的,所述调速器还包括电磁制动器、柔性连接器和驱动轴;
11.所述电磁制动器套设在所述电机的输出轴的外部,所述驱动轴一端与所述电机的输出轴通过所述柔性连接器连接;
12.所述驱动轴的另一端贯穿所述铁心的一端的相对的两个侧面,并与所述铁心轴连
接。
13.可选的,所述调速器还包括支撑座、开口销和底座;
14.所述支撑座包括支撑座本体和滑动轴承,所述滑动轴承固定在所述支撑座本体上,所述驱动轴贯穿所述滑动轴承内部;
15.所述开口销设置在所述驱动轴的另一端穿出所述铁心的一端的部分,用于对所述铁心进行轴向定位;
16.所述底座包括底座本体及设置在所述底座本体上的左限位块和右限位块;
17.所述电机、所述铁心和所述线圈均设置于所述底座本体上,所述左限位块和所述右限位块用于限定所述铁心摆动的范围。
18.可选的,所述调速器还包括电路模块,所述电路模块包括电源模块、测速控制模块、通信模块和执行电路模块;
19.所述电源模块分别与所述测速控制模块、所述通信模块和所述执行电路模块连接;
20.所述通信模块分别与所述测速控制模块、所述执行电路模块及控制中心连接;
21.所述测速控制模块与所述线圈连接;所述测速控制模块用于利用多普勒测速原理,向所述线圈发送脉冲、并接收线圈返回脉冲,获取列车实时速度,用于修正控制中心走行速度检测装置测量结果;可见本发明的线圈既有控制吸力又兼有测速功能,用于控制产生电磁吸力,以及利用多普勒测速原理,发送、接收脉冲,测量列车实时速度,测速更精确。
22.所述执行电路模块分别与所述电机和所述线圈连接。
23.所述调速装置包括多个调速器组和多个控制中心,每个所述调速器组均包括多个调速器,多个所述调速器均匀分布在调速路段的钢轨内的不同轨枕之间;
24.多个所述调速器组沿列车前进的方向依次设置,多个所述控制中心分别一一对应的与多个所述调速器组连接;
25.与沿列车前进的方向依次设置的调速器组连接的控制中心依次级联连接。
26.可选的,所述控制中心包括参数检测单元、控制单元和执行单元;
27.所述参数检测单元与所述控制单元连接,用于检测溜放车辆速度相关数据,并将所述溜放车辆速度相关数据发送给所述控制单元;所述溜放车辆速度相关数据包括:溜放车辆速度v
l
、前方车辆速度vq;溜放车辆与终点的距离lz、溜放车辆与前方车辆的距离即钩距lg、溜放车辆与分歧道岔的距离lf;溜放车辆车辆轴重m,前车车辆轴重m2;环境参数,所述环境参数包括风速、风向和温度;溜放车辆走行阻力w,前车走行阻力w2;离开调速器组实际出口速度v
shi
;
28.所述控制单元与所述执行单元连接,用于根据所述溜放车辆速度相关数据采用调速方法确定溜放车辆出口速度,并计算调速误差系数,将所述调速误差系数发送给后一级控制中心,并利用前一级的控制中心输出的调速误差系数对所述溜放车辆出口速度进行修正,获得修正后的溜放车辆出口速度,并将修正后的溜放车辆出口速度发送给所述执行单元;其中,最前级的控制中心的调速误差系数为1;
29.所述执行单元与调速器组连接,所述执行单元用于根据修正后的溜放车辆出口速度生成调速器动作方式,并将所述调速器动作方式发送给所述调速器组中的每个所述调速器。
30.一种编组站调速方法,所述调速方法包括如下步骤:
31.根据溜放车辆速度相关数据,采用训练好的神经网络模型,确定溜放车辆最大速度v
max
;所述溜放车辆速度相关数据包括:溜放车辆速度v
l
、前方车辆速度vq;溜放车辆与终点的距离lz、溜放车辆与前方车辆的距离即钩距lg、溜放车辆与分歧道岔的距离lf;溜放车辆车辆轴重m,前车车辆轴重m2;环境参数,所述环境参数包括风速、风向和温度;溜放车辆走行阻力w,前车走行阻力w2;离开调速器组实际出口速度v
shi
;
32.根据所述溜放车辆最大速度v
max
,计算溜放车辆出口速度vc;
33.根据所述溜放车辆出口速度确定调速器动作方式。
34.可选的,所述根据所述溜放车辆最大速度v
max
,计算溜放车辆出口速度vc,具体包括:
35.判断溜放车辆和前方车辆是否为相同终点,获得第一判断结果;
36.若所述第一判断结果表示是,则判断公式是否成立,获得第二判断结果;
37.若所述第二判断结果表示是,则利用公式vc=v
max
计算溜放车辆出口速度;
38.若所述第二判断结果表示否,则通过求解模型tz+tj≥t
q2
,计算溜放车辆出口速度;其中,tz为溜放车辆从进入调速器组入口到终点的走行时间,t
q2
为前方车辆从进入调速器组入口到终点的走行时间,tj为前后车组进入调速器组的时间间隔;为前后车组进入调速器组的时间间隔;lj表示调速器组的长度;
39.若所述第一判断结果表示否,则判断公式lg>lf或是否成立,获得第三判断结果;
40.若所述第三判断结果表示是,则利用公式vc=v
max
计算溜放车辆出口速度;
41.若所述第三判断结果表示否,则通过求解模型t
l
+tj≥tq,计算溜放车辆出口速度;其中,t
l
为溜放车辆从进入调速器组入口到分歧道岔入口区段的走行时间,tq为前方车辆从进入调速器组入口到分歧道岔出口区段的走行时间,
42.可选的,所述根据溜放车辆出口速度确定调速器动作方式,之前还包括:
43.根据前一级控制中心输出的调速误差系数,利用公式对溜放车辆出口速度进行修改,获得修正后的溜放车辆出口速度vc';
44.其中,r表示前一级控制中心输出的调速误差系数,和分别表示前一级控制中心检测得到的溜放车辆速度和离开调速器组实际出口速度,表示前一级控制中心计算得到的溜放车辆出口速度,n表示当前级,n-1表示前一级。
45.根据本发明提供的具体实施例,本发明公开了以下技术效果:
46.本发明公开了一种调速器、编组站调速装置及方法,所述调速器包括:电机、铁心、线圈;所述电机与所述铁心的一端轴连接,所述线圈缠绕在所述铁心的外部;所述电机用于调整所述铁心的方向。本发明,通过线圈通电使铁心具有吸力,通过设置电机以实现铁心和线圈的摆动角度的调整,实现吸力方向的调整,进而实现了列车的加速或减速调整。
附图说明
47.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
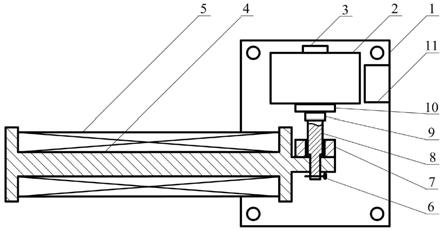
48.图1为本发明提供的一种调速器的结构示意图;
49.图2为本发明提供的一种调速器的第一局部剖视图;
50.图3为本发明提供的一种调速器的第二局部剖视图;
51.图4为本发明提供的调速器组的分布图;
52.图5为本发明提供的控制中心的结构组成图。
具体实施方式
53.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
54.本发明的目的是提供一种调速器、编组站调速装置及方法,以提供一种既能实现加速也能实现减速,且噪声小的减速装置。
55.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
56.本发明利用电生磁原理,当电流通过线圈时,非常小的电流,就可以产生很大的磁吸力,提高调速效果。设计电磁调速器结构的角度切换,实现溜放车辆加速减速,并利用多个电磁调速器组成调速器组,实现溜放车辆精确、高效的速度控制。通过对电磁调速器的结构、分布设计,实现速度可调的速度控制;通过自学习的智能控制算法,融合处理走行速度、走行距离、走行阻力、车辆重量、车辆车型等参数,计算车辆调速措施,并根据计算与实际误差不断更新计算模型。
57.实施例1
58.如图1-3所示,本发明提供一种调速器,所述调速器包括:电机2、铁心4、线圈5;所述电机与所述铁心的一端轴连接,所述线圈缠绕在所述铁心的外部;所述电机用于调整所述铁心的方向。调速器的工作原理为:利用电生磁原理,当电流通过线圈时,非常小的电流,就可以产生很大的磁吸力,提高调速效果。设计电磁调速器结构的角度切换,实现溜放车辆加速减速。其中电机2采用步进电机,用于控制调速器的角度旋转。铁芯4采用高导磁材料,如硅钢,包括:铁芯摆臂4-1和滑动垫片4-2,滑动垫片4-2用于减少转动摩擦力。线圈5既有
控制吸力又兼有测速功能,用于控制产生电磁吸力,以及利用多普勒测速原理,发送、接收脉冲,测量列车实时速度,测速更精确,用于修正控制中心走行速度检测装置测量结果。
59.所述调速器还包括码盘3,所述码盘设置在所述电机的输出轴上,所述码盘用于测量所述电机的转角。
60.所述调速器还包括电磁制动器10、柔性连接器9和驱动轴8;所述电磁制动器套设在所述电机的输出轴的外部,所述驱动轴一端与所述电机的输出轴通过所述柔性连接器连接;所述驱动轴的另一端贯穿所述铁心的一端的相对的两个侧面,并与所述铁心轴连接。其中,驱动轴8用于传递转动力矩,避免电机轴受引力,柔性连接器9用于电机轴与驱动轴不同轴转动,避免电机轴受引力,电磁制动器,10用于抱闸制动,实现调速器铁芯定位。
61.所述调速器还包括支撑座7;所述支撑座包括支撑座本体7-1和滑动轴承7-2,所述滑动轴承固定在所述支撑座本体上,所述驱动轴贯穿所述滑动轴承内部。支撑座7用于旋转支撑,承受引力,避免电机轴受引力改善工况。
62.所述调速器还包括开口销6;所述开口销设置在所述驱动轴的另一端穿出所述铁心的一端的部分,用于对所述铁心进行轴向定位。开口销6用于摆臂的轴向定位和固定。
63.述调速器还包括底座1;所述底座包括底座本体及设置在所述底座本体1-1上的左限位块1-2和右限位块1-3;所述电机、所述铁心和所述线圈均设置于所述底座本体上,所述左限位块和所述右限位块用于限定所述铁心摆动的范围。
64.所述调速器还包括电路模块11,所述电路模块包括电源模块、测速控制模块、通信模块和执行电路模块;所述电源模块分别与所述测速控制模块、所述通信模块和所述执行电路模块连接;所述通信模块分别与所述测速控制模块、所述执行电路模块及控制中心连接;所述测速控制模块与所述线圈连接;所述执行电路模块分别与所述电机和所述线圈连接。电源模块为36v-72v直流电,测速控制模块实现多普勒测速脉冲的调制、解调及计算;通信模块完成单个调速器与控制中心中控制器的信息交换;执行电路,按照控制中心发送的命令执行调整调速器结构、吸力大小。
65.实施例2
66.本发明还提供一种编组站调速装置,所述调速装置包括多个调速器组和多个控制中心,多个所述调速器组沿列车前进的方向依次设置,多个所述控制中心分别一一对应的与多个所述调速器组连接;与沿列车前进的方向依次设置的调速器组连接的控制中心依次级联连接。
67.如图4所示,所述调速器组包括多个调速器,多个所述调速器均匀分布在调速路段的钢轨内的不同轨枕之间。调速器组工作原理:多个调速器组成调速器组,收到控制中心控制命令后,选择性开通调速器组中的调速器以及调节每个调速器线圈的电流大小,进而改变调速器组对整个车辆的吸力大小,实现精准调速。此外可适当选择开通某一个调速器进行车辆的速度测量。
68.应用在所述调速装置中时,调速器工作原理:底座1固定于轨枕、钢轨中间地面下,电路模块11中通信模块收到控制中心执行单元发送的产生吸力控制命令后,电路模块11中执行电路控制电机2转动规定角度,角度信息由码盘3提供,电机2的轴带动柔性连接器9、驱动轴8转动,进而转动铁芯4、线圈5装置,铁芯4角度到位后,利用电磁制动器10进行抱闸制动定位,同时执行电路给线圈5通电(直流),线圈5通电后,铁芯4产生电磁吸力,由于列车结
构材质为含铁金属,受吸力作用。当铁芯偏向与列车运行方向相反时,吸力吸引列车,列车受与运行方向相同的力,产生加速度。当铁芯偏向与列车运行相同时,吸力吸引列车,列车受与运行方向相反的力,产生减速度。此外,有测速功能的调速器,通过电路模块11中的测速控制模块产生脉冲加在线圈5上,同时线圈5接收返回的电磁波,测速控制模块处理后得出车辆实时速度,通过通信模块发送给控制控制中心。
69.如图5所示,所述所述控制中心包括参数检测单元、控制单元和执行单元;所述参数检测单元与所述控制单元连接,用于检测溜放车辆速度相关数据,并将所述溜放车辆速度相关数据发送给所述控制单元;所述溜放车辆速度相关数据包括:溜放车辆速度v
l
、前方车辆速度vq;溜放车辆与终点的距离lz、溜放车辆与前方车辆的距离即钩距lg、溜放车辆与分歧道岔的距离lf;溜放车辆车辆轴重m,前车车辆轴重m2;环境参数,所述环境参数包括风速、风向和温度;溜放车辆走行阻力w,前车走行阻力w2;离开调速器组实际出口速度v
shi
;所述控制单元与所述执行单元连接,用于根据所述溜放车辆速度相关数据采用调速方法确定溜放车辆出口速度,并计算调速误差系数,将所述调速误差系数发送给后一级控制中心,并利用前一级的控制中心输出的调速误差系数对所述溜放车辆出口速度进行修正,获得修正后的溜放车辆出口速度,并将修正后的溜放车辆出口速度发送给所述执行单元;所述执行单元与调速器组连接,所述执行单元用于根据修正后的溜放车辆出口速度生成调速器动作方式,并将所述调速器动作方式发送给所述调速器组中的每个所述调速器。
70.具体的,每个控制中心各自的参数检测单元的5个模块连接控制单元的控制器,数据库连接控制器,控制器连接调速器的电路模块11中通信模块,控制器通过继电器电路连接调速器通断选择控制模块,控制器连接调速器角度控制模块,调速器通断选择控制模块和调速器角度控制模块连接调速器电路模块11中的通信模块。
71.参数检测单元:检测调速所需参数,并发送给控制器。包含走行速度检测装置,采用多普勒雷达测速,测量车辆实时速度;走行距离检测装置,利用现有轨道电路数据测量,检测车辆与终点的距离,判断列车还需要走多远,此外检测与前方车辆的距离即钩距;走行阻力检测装置,利用车辆类型、车辆重量、位置、风速等估算车辆运行的阻力;车辆重量检测装置,利用压磁重力传感器测量车辆轴重;环境监测装置能检测风速、风向、温度等环境参数。
72.控制单元:接收参数检测单元发送的参数,以及调速器电路模块11中通信模块发送的速度信息,结合数据库计算生成控制指令,控制执行单元。包含数据库和控制器,数据库中存储车辆参数(节数、类型、走行线路、线路条件、经验阻力);控制器包含神经网络构建模块、速度等级分类模块、控制结果计算模块,控制器处理各种数据参数,通过计算控制结果,并控制执行单元动作。
73.神经网络构建模块为bp神经网络架构,用于根据行车难度、调速器制动能力、环境影响、实际速度相关数据构建神经网络,对神经网络的初始参数进行设置,所述初始参数包括隐含层节点数;基于归一化后的输入数据和神经网络初始参数进行神经网络的训练,得到溜放车辆最大速度v
max
等级分类模型,神经网络模型为三层结构,神经网络模型包括输入层、隐含层及输出层。溜放车辆最大速度v
max
,指溜放车辆在所有调速器组最大制动力情况下,能够实现与目的车辆的安全连挂,超过这个速度会造成不安全连挂的危险,对于同一条线路,由于行车难度、调速器制动能力、环境影响等输入参数的变化,v
max
发生变化,本发明
将v
max
速度大小分为5的等级作为输出结果。
74.所述bp神经网络中,每类参数规划至[0,1]的范围内。
[0075]
所述bp神经网络中隐含层节点数计算公式:
[0076][0077]
h为隐含层节点的数目,m和n分别是输入层和输出层节点的数目,a为1~10之间的调节常数。本实施例中,输入层节点数为3,输出层节点数为1,a为8。
[0078]
速度等级分类模块用于根据神经网络构建模块和实时采集的溜放车辆速度相关数据计算最大速度的等级。
[0079]
控制结果计算模块内含调速方法,通过调速方法计算控制执行单元的结果与指令。
[0080]
执行单元:根据控制单元命令,产生动作调速器组命令,包括调速器通断选择控制模块,调速器角度控制模块,调速器通断选择控制模块,将每个调速器通断命令发送给对应调速器的电路模块11中通信模块,调速器通断即调速器是否启用,控制整个调速器组的吸力大小;调速器角度控制模块,将每个调速器角度命令发送给对应调速器的电路模块11中通信模块,控制调速器旋转角度,即单个调速器吸力大小。
[0081]
实施例3
[0082]
一种编组站调速方法,所述调速方法包括如下步骤:
[0083]
根据溜放车辆速度相关数据,采用训练好的神经网络模型,确定溜放车辆最大速度v
max
;所述溜放车辆速度相关数据包括:溜放车辆速度v
l
、前方车辆速度vq;溜放车辆与终点的距离lz、溜放车辆与前方车辆的距离即钩距lg、溜放车辆与分歧道岔的距离lf;溜放车辆车辆轴重m,前车车辆轴重m2;环境参数,所述环境参数包括风速、风向和温度;溜放车辆走行阻力w,前车走行阻力w2;离开调速器组实际出口速度v
shi
;
[0084]
根据所述溜放车辆最大速度v
max
,计算溜放车辆出口速度vc;
[0085]
根据所述溜放车辆出口速度确定调速器动作方式。
[0086]
其中,所述根据所述溜放车辆最大速度,计算溜放车辆出口速度,具体包括:判断溜放车辆和前方车辆是否为相同终点,获得第一判断结果;若所述第一判断结果表示是,则判断公式是否成立,获得第二判断结果;若所述第二判断结果表示是,则利用公式vc=v
max
计算溜放车辆出口速度;若所述第二判断结果表示否,则通过求解模型tz+tj≥t
q2
,计算溜放车辆出口速度;其中,tz为溜放车辆从进入调速器组入口到终点的走行时间,t
q2
为前方车辆从进入调速器组入口到终点的走行时间,tj为前后车组进入调速器组的时间间隔;时间间隔;lj表示调速器组的长度;若所述第一判断结果表示否,则判断公式lg>lf或是否成立,获得第三判断结果;若所述第三判断结果表示是,则利用公式vc=v
max
计算溜放车辆出口速度;若所述第三判断结果表示否,则通过求解模型t
l
+tj≥tq,计算溜放车辆出口速度;其中,t
l
为溜放车辆从进入调速器组入口到分歧道岔入口区段的走行时间,tq为前方车
辆从进入调速器组入口到分歧道岔出口区段的走行时间,
[0087]
所述根据溜放车辆出口速度确定调速器动作方式,之前还包括:
[0088]
根据前一级控制中心输出的调速误差系数,利用公式对溜放车辆出口速度进行修改,获得修正后的溜放车辆出口速度vc';其中,r表示前一级控制中心输出的调速误差系数,和分别表示前一级控制中心检测得到的溜放车辆速度和离开调速器组实际出口速度,表示前一级控制中心计算得到的溜放车辆出口速度,n表示当前级,n-1表示前一级。
[0089]
具体的,编组站调速方法,植入于控制器中,应用于上述一种驼峰调速装置,即控制中心,所述方法包括:
[0090]
步骤一:参数检测单元检测调速所需参数,实时采集溜放车辆速度相关数据。走行速度检测装置,测量溜放车辆速度v
l
、前方车辆速度vq;走行距离检测装置,检测车辆与终点的距离lz、与前方车辆的距离即钩距lg、与分歧道岔的距离lf;车辆重量检测装置,利用压磁重力传感器测量车辆轴重m;环境监测装置能检测风速、风向、温度等环境参数;走行阻力检测装置,结合车辆类型、车辆重量、位置、风速及数据库中阻力估算方法、数据估算出阻力w。
[0091]
步骤二:速度等级分类模块根据神经网络构建模块和参数检测单元实时采集的溜放车辆速度相关数据计算生成v
max
。
[0092]
步骤三:(1)控制结果计算模块以v
max
为基础计算溜放车辆出口速度vc。首先判断溜放车辆与前车是否相同终点。
[0093]
如果溜放车辆与前车不同终点:lg>lf或vc=v
max
;vc按t
l
+tj≥tq模型计算,其中,t
l
为溜放车辆从进入调速器组入口到分歧道岔入口区段的走行时间,tq为前方车辆从进入调速器组入口到分歧道岔出口区段的走行时间。
[0094]
如果溜放车辆与前车相同终点:vc按tz+tj≥t
q2
模型计算,其中t
l
为溜放车辆从进入调速器组入口到分歧道岔入口区段的走行时间,tq为前方车辆从进入调速器组入口到分歧道岔出口区段的走行时间。
[0095]
(2)控制结果计算模块以vc为基础计算调速器组动作方式。首先判断vc与v
l
大小。
[0096]
如果vc≥v
l
,控制结果为加速,调速器组动作方式为进入调速器组立即执行加速,并计算加速度及执行单元控制大小的指令。
[0097]
如果vc<v
l
,控制结果为减速,计算调速器组动作方式:
[0098]
①
对归一化处理至[0,1]的范围内,车辆难易行程度、线路难易行程度、阻力补偿、车长补偿、实际调速结果误差归一化处理至[-1,1]的范围内,按照不同编组站的工程条件,对上述参数进行加权求和,并归一化处理至[0,1]的范围内,映射到调速器组动作
长度,0为调速器不做减速动作,减速长度为0;1为车头进入调速器组立即执行动作,减速长度为(lj+lc),lj为调速器组长度,lc为溜放车辆长度。根据减速长度、vc计算减速度及执行单元控制大小的指令。
[0099]
步骤四:根据计算生成控制指令,通过执行单元完成控制动作。
[0100]
步骤五:通过调速器电路模块11中测速控制模块修正调速过程测量的车辆速度,根据实际调速结果,实时将实际调速结果误差返回修正步骤三(2)动作长度的加权系数。
[0101]
步骤六:循环步骤三(2)、步骤四、步骤五直至溜放车辆驶出调速器组,实现调速的闭环控制。
[0102]
步骤七:将溜放车辆实际出口速度结果误差返回修正步骤三(1)∑t
l
+tj≥σtq模型参数、步骤三(2)动作长度的加权系数。
[0103]
车辆溜放过程存在太多不精确因素,比如阻力的不精确,车辆自身参数每天的变化等,会存在误差,后一级调速位如果引入前一级调速位的调速误差,就能消除车辆自身、阻力等不确定因素所带来的的误差,使后一级调速位更加准确。
[0104]
因此后一级调速位控制中心所述方法在前一级调速位控制中心所述方法基础,增加步骤三(3):引入前一级调速位的调速误差,对后一级调速位的控制指令进行误差补偿,为本发明的一种优选的实施方式。
[0105]
整个编组站中,根据列车溜放的过程,需要在不同位置设置调速位,前一级调速位的控制中心和后一级调速位的控制中心相连接,如:一节列车溜放时,前一级调速位的控制中心首先对列车调速,调速目标速度为溜放车辆出口速度vc,测量实际出口速度v
shi
,存在误差,计算调速器调速误差系数为:后一级调速位的控制中心的溜放车辆出口速度vc计算出后,除以调速误差系数修正后为作为新的vc计算调速器组动作方式,修正了整个调速过程环境、调速器等误差。
[0106]
本发明的调速装置及方法的工作原理为:编组站溜放车辆从驼峰解体后,车辆溜放,即将进入调速器组时,通过控制中心的参数检测单元检测调速所需参数(速度、距离、阻力、车辆重量、环境参数),并发送给控制中心的控制单元。控制单元接收参数检测单元发送的参数,以及调速器电路模块11中通信模块发送的速度信息,速度等级分类模块结合数据库通过神经网络构建模块和实时采集的溜放车辆速度相关数据计算得到溜放车辆最大速度v
max
,控制结果计算模块利用内含调速方法,计算控制执行单元的结果与指令,并通过调速器通断选择控制模块和调速器角度控制模块将控制指令发送给调速器电路模块11中的通信模块,电路模块11中通信模块收到控制中心执行单元发送的产生吸力控制命令后,电路模块11中执行电路控制电机2转动规定角度,角度信息由码盘3提供,电机2的轴带动柔性连接器9、驱动轴8转动,进而转动铁芯4、线圈5装置,铁芯4角度到位后,利用电磁制动器10进行抱闸制动定位,同时执行电路给线圈5通电(直流),线圈5通电后,铁芯4产生电磁吸力,由于车辆结构材质为含铁金属,受吸力作用。当铁芯偏向与列车运行方向相反时,吸力吸引列车,列车受与运行方向相同的力,产生加速度。当铁芯偏向与列车运行相同时,吸力吸引列车,列车受与运行方向相反的力,产生减速度。
[0107]
本发明的技术方案存在如下技术效果:
[0108]
通过单个调速器结构设计,利用铁芯、线圈产生电磁吸力,解决现有调速器噪音问
题、解决调速器动作滞后问题、相比于其他电磁调速器利用电磁涡流能量转换效率更高。此外利用线圈实现车辆测速,为溜放车辆速度提供更精确的测量方式,用于补偿调速方法,使调速更精确。
[0109]
通过单个调速器旋转结构设计,解决了现有调速器及现有专利介绍的调速器只能实现减速功能的问题,本发明既能实现车辆减速,又能实现加速,加速控制的实现,为已建好的较低驼峰的编组站整改为高能力解编编组站提供更便捷的工程施工,如已建好的驼峰编组站,溜放车辆的初速度已固定不能再提高,解编效率不能提高,要提高解体效率要对整个编组站的驼峰、线路条件、调速器重新设计,而本专利只需更改调速器吸力方向及大小就能够提高溜放速度,提高整体效率。
[0110]
通过调速器组的分布设计,可以实现溜放车辆的连续调速,从进入调速器组到驶出调速器组全程连续受力,解决了现有调速器只有车轮经过调速器时才受力的点式调速问题。
[0111]
通过调速方法的设计,通过神经网络构建引入了溜放车辆的v
max
速度,提高了编组效率;通过调速器组动作长度的归一化设计,实现溜放车辆在调速器组动作开始地点的计算,解决了现有减速区控制位置的不精确性;通过引入实时速度测量,实时更新速度算法的参数修正,自学习的方式使控制速度更精确;后一级调速位控制中心调速方法在前一级调速位控制中心调速方法基础上,引入前一级调速位的调速误差,对后一级调速位的控制指令进行误差补偿,建立了前后级调速位的联系,调速结果更加准确,原因:车辆溜放过程存在太多不精确因素,比如阻力的不精确,车辆自身参数的变化等,根据现有模型计算结果就不精确,但如果引入前一级调速位的调速误差,就能消除车辆自身、阻力等不确定因素所带来的的误。
[0112]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
[0113]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。