1.本实用新型涉及越障机器人技术领域,具体涉及一种全地形四连杆越障机器人。
背景技术:
2.随着科技的发展,机器人技术越来越成熟,机器人已经不仅仅被用于工业生产中进行周期性机械化生产,而且被用于军事、水下探测、空间探测、抢险救灾、核工业等领域。因此,对能够在特殊环境下积极适应并灵活移动的“特种机器人”的研究越来越受到各个国家的一致重视。现有的机器人主要分为四类:轮式、腿式、履带式、复合式(如轮腿式、轮履式等),其中轮式和履带式使用最为广泛,轮式机器人移动速度快、控制灵活,尤其转向比较容易实现,但是应对复杂、恶劣路况适应性较差。履带式机器人,适应性强,履带与地面接触面积大,但运动速度较慢,不够灵活,机动性较差,且往往能量消耗较大。
技术实现要素:
3.为了克服上述现有技术存在的问题,本实用新型的目的在于提供一种全地形四连杆越障机器人,通过四连杆机械腿结构,模拟爬行类动物的四肢,行驶灵活多变,能够有助于更轻松的越过障碍物,具有较高机动性和地形适应性。
4.为了实现上述目的,本实用新型提供如下技术方案:
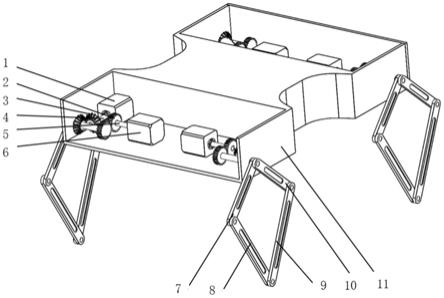
5.一种全地形四连杆越障机器人,包括机身11,所述机身11内两侧的前后两端分别对称设置有动力传输装置,动力传输装置包括第一电机1与第二电机6,第一电机1通过第一传动轴4与第一锥齿轮3中心相连接,第一锥齿轮3与第二锥齿轮14相啮合,第二锥齿轮14中心与空心轴15一端相连接;第二电机6通过第二传动轴5与第一直齿轮2中心固定连接,第一直齿轮2与第二直齿轮12相啮合,第二直齿轮12中心与实心轴13的一端相连接,实心轴13的另一端穿过空心轴15,实心轴13的另一端、空心轴15的另一端与机身11外侧的四连杆机械腿的不同的主动杆相连接。
6.所述四连杆机械腿,包括首尾相连的第一主动杆7、第一从动杆8、第二从动杆9及第二主动杆10,第一主动杆7的一端与空心轴15另一端相连接,第一主动杆7的另一端通过转轴与第一从动杆8的一端可转动连接,第一从动杆8的另一端通过转轴与第二从动杆9的一端可转动连接,第二从动杆9的另一端通过转轴与第二主动杆10的一端可转动连接,第二主动杆10的另一端与实心轴13另一端相连接。
7.所述第一主动杆7与第二主动杆10的长度相等。
8.所述第一从动杆8与第二从动杆9的长度相等。
9.所述第一电机1及第二电机6在机器人跳跃状态时的转速是机器人行走状态时的转速的30-50倍。
10.与现有技术相比,本实用新型的有益效果是:
11.本实用新型通过动力传输装置为机器人传输动力,每一个主动杆都由一个电机驱动,动力充足并且四连杆机械腿的运转更加灵活,可以实现各种动作;四连杆机械腿的结构
模拟爬行类动物的四肢,行驶灵活多变,有助于更轻松的越过障碍物,优化了对于地形的适应力,具有结构科学合理,使用安全方便的优点。
附图说明
12.图1为本实用新型的结构示意图。
13.图2为本实用新型的四连杆机械腿的结构示意图。
14.图3为本实用新型的四连杆机械腿的移动示意图。
15.图4为本实用新型的四连杆机械腿的跳跃示意图。
16.图中:1、第一电机;2、第一直齿轮;3、第一锥齿轮;4、第一传动轴;5、第二传动轴;6、第二电机;7、第一主动杆;8、第一从动杆;9、第二从动杆;10、第二主动杆;11、机身;12、第二直齿轮;13、实心轴;14、第二锥齿轮;15、空心轴。
具体实施方式
17.下面结合附图,对本实用新型的技术方案进行描述。
18.参见图1、图2,一种全地形四连杆越障机器人,包括机身11,所述机身11内两侧的前后两端分别对称设置有动力传输装置,动力传输装置包括第一电机1与第二电机6,第一电机1通过第一传动轴4与第一锥齿轮3中心相连接,第一锥齿轮3与第二锥齿轮14相啮合,第二锥齿轮14中心与空心轴15一端相连接;第二电机6通过第二传动轴5与第一直齿轮2中心固定连接,第一直齿轮2与第二直齿轮12相啮合,第二直齿轮12中心与实心轴13的一端相连接,实心轴13的另一端穿过空心轴15,实心轴13的另一端、空心轴15的另一端与机身11外侧的四连杆机械腿的不同的主动杆相连接;四连杆机械腿的第一主动杆7由第一电机1驱动,通过空心轴15将动力传递到第一主动杆7;第二主动杆10由第二电机6驱动,通过实心轴13将动力传递到第二主动杆10。
19.所述四连杆机械腿,包括首尾相连的第一主动杆7、第一从动杆8、第二从动杆9及第二主动杆10,第一主动杆7的一端与空心轴15另一端固定连接,第一主动杆7的另一端通过铰链与第一从动杆8的一端可转动连接,第一从动杆8的另一端通过铰链与第二从动杆9的一端可转动连接,第二从动杆9的另一端通过铰链与第二主动杆10的一端可转动连接,第二主动杆10的另一端与实心轴13另一端固定连接。
20.所述第一主动杆7与第二主动杆10的长度相等。
21.所述第一从动杆8与第二从动杆9的长度相等。
22.所述第一电机1及第二电机6在机器人跳跃状态时的转速是机器人行走状态时的转速的30-50倍。
23.所述机身11、齿轮、四连杆机械腿的材质均采用铝合金,铝合金强度高质量轻,能够较大程度减小整体的质量。
24.所述机器人的电性连接及控制程序为本领域常规设置,不做赘述。
25.本实用新型的工作原理为:
26.图3是机器人在行走过程中四连杆机械腿的具体运转过程:初始状态下,第一主动杆7、第二主动杆10均处于水平位置,第一主动杆7在第一电机1作用下做顺时针转动,当第一主动杆7转动90度至竖直位置时,完成行走状态向前“抬腿”的第一步,然后,第一主动杆7
逆时针转动90度到水平位置,此时两个主动杆均处于水平位置;接下来,第二主动杆10在第二电机6的作用下逆时针转动90度到竖直位置,该动作的完成使得机器人向前移动;最后第二主动杆10顺时针转动90度转至水平位置,整个四连杆机械腿再一次回归到初始状态,完成整个移动的动作,实现移动的功能。
27.图4是机器人跳跃功能的四连杆机械腿的具体运转过程:初始状态下,第一主动杆7、第二主动杆10均处于水平位置,其一组四连杆机械腿在第一电机1驱动下,第一主动杆7逆时针转动45度,在第二电机6驱动下,第二主动杆10顺时针转动45度运动,完成“蓄力”的动作;蓄力完成后,完成起跳动作时,第一主动杆7在第一电机1驱动下顺时针旋转90度运动,第二主动杆10在第二电机6驱动下逆时针旋转90度运动,且此时电机转速比行走时电机转速高30-50倍,给整个机体一个向上的惯性力,从而实现跳跃动作。运动示意图如图4所示,完成一整套跳跃动作从而实现跳跃功能。
技术特征:
1.一种全地形四连杆越障机器人,包括机身(11),其特征在于:所述机身(11)内两侧的前后两端分别对称设置有动力传输装置,动力传输装置包括第一电机(1)与第二电机(6),第一电机(1)通过第一传动轴(4)与第一锥齿轮(3)中心相连接,第一锥齿轮(3)与第二锥齿轮(14)相啮合,第二锥齿轮(14)中心与空心轴(15)一端相连接;第二电机(6)通过第二传动轴(5)与第一直齿轮(2)中心固定连接,第一直齿轮(2)与第二直齿轮(12)相啮合,第二直齿轮(12)中心与实心轴(13)的一端相连接,实心轴(13)的另一端穿过空心轴(15),实心轴(13)的另一端、空心轴(15)的另一端与机身(11)外侧的四连杆机械腿的不同的主动杆相连接。2.根据权利要求1所述的一种全地形四连杆越障机器人,其特征在于:所述四连杆机械腿,包括首尾相连的第一主动杆(7)、第一从动杆(8)、第二从动杆(9)及第二主动杆(10),第一主动杆(7)的一端与空心轴(15)另一端相连接,第一主动杆(7)的另一端通过转轴与第一从动杆(8)的一端可转动连接,第一从动杆(8)的另一端通过转轴与第二从动杆(9)的一端可转动连接,第二从动杆(9)的另一端通过转轴与第二主动杆(10)的一端可转动连接,第二主动杆(10)的另一端与实心轴(13)另一端相连接。3.根据权利要求2所述的一种全地形四连杆越障机器人,其特征在于:所述第一主动杆(7)与第二主动杆(10)的长度相等。4.根据权利要求2所述的一种全地形四连杆越障机器人,其特征在于:所述第一从动杆(8)与第二从动杆(9)的长度相等。5.根据权利要求1所述的一种全地形四连杆越障机器人,其特征在于:所述第一电机(1)及第二电机(6)在机器人跳跃状态时的转速是机器人行走状态时的转速的30-50倍。
技术总结
一种全地形四连杆越障机器人,包括机身,机身内的两侧前后两端分别对称设置有动力传输装置,动力传送装置的动力输出端分别与四连杆机械腿相连接;四连杆机械腿的每一个主动杆都由一个电机驱动,动力充足并且四连杆机械腿的运转更加灵活,可以实现各种动作;四连杆机械腿的结构模拟爬行类动物的四肢,行驶灵活多变,有助于更轻松的越过障碍物,优化了对于地形的适应力,具有结构科学合理,使用安全方便的优点。的优点。的优点。
技术研发人员:金丹丹 田柯 高健 吴鹏 杨程晖 李臻
受保护的技术使用者:西安石油大学
技术研发日:2021.09.27
技术公布日:2022/2/7