1.本发明属于无人驾驶车辆转向系统及其控制领域,涉及一种无人驾驶车辆自主转向系统的容错装置及容错控制方法。
背景技术:
2.无人驾驶车辆通过感知层的感知类传感器、高精度地图和全球定位定位系统(gps)获取车辆当前的位置信息和车辆周围的环境信息,通过整车控制器进行信息融合,并在出发地和目的地之间规划一条合适路径。无人驾驶车辆的自主转向系统通过路径跟踪和避障等算法计算出合适的前轮转角,并通过对转向电机的控制,通过机械结构的力矩传递作用使转向轮转到一定角度完成对期望路径的跟踪。无人驾驶车辆是智慧交通系统的重要部分,它不但可以解放驾驶员的双手,而且可以提高交通系统的运行效率。但在车辆行驶过程中,若车辆的转向执行器发生故障或者失效,这种未知的故障有可能使车辆偏离期望的路径以及影响车辆的稳定性,甚至引发严重的交通事故。
3.无人驾驶车辆的行驶安全是实现无人驾驶的首要考虑因素,因此,转向执行器故障的自诊断和主动容错控制是无人驾驶车辆自主转向系统的重要组成部分。就转向电机故障诊断而言,现有的故障诊断技术大多采用转向电机电流预期期望值的残差,转向电机内阻与期望值的残差、转向电机反电动势与期望值的残差是否在正常阈值内,判别转向系统是否发生故障,以及故障的发生等级。但由于传感器发生故障或一些机械结构件发生故障,单独基于传感器观测的方法无法准确判断转向电机的故障等级。因此需要着力设计一种基于传感器直接观测故障、基于车辆位置偏差和航向偏差估计故障相融合的故障诊断方法判别执行器故障等级。
4.现有的无人驾驶车辆自主转向系统故障的容错控制技术,大多参考线控转向故障的容错控制技术,当转向执行器发生故障时,通过电磁锁止装置将机械冗余系统接入,实现自主转向到驾驶员电子助力转向的切换。这种方法无法确保驾驶员及时接管转向,同时电磁锁止装置的持续锁止和大量机械结构的介入将使得转向系统造成电能的损耗。
技术实现要素:
5.针对现有技术中存在不足,本发明提供了一种无人驾驶车辆自主转向系统的容错装置及容错控制方法,在容错控制过程中无需驾驶员接管转向,提高了车辆行驶的安全和稳定性。
6.本发明是通过以下技术手段实现上述技术目的的。
7.一种无人驾驶车辆自主转向系统的容错装置,其特征在于,包括执行机构、检测单元、故障诊断模块和整车控制器,所述执行机构包括容错切换机构,所述容错切换机构包括齿轮、衔接套、拨杆、支点、滚珠丝杠、滚珠螺母、拨杆电机、第二减速器、第二滚珠轴承和第一转向管柱下齿轮;齿轮位于第二转向管柱上,衔接套的柱体表面与拨杆一端配合,衔接套上端与第一转向管柱下齿轮配合,衔接套下端与第二转向管柱上齿轮处于常啮合状态;拨
杆电机的输出轴与第二减速器的输入齿轮连接,第二减速器输出轴固定在滚珠螺母上,滚珠螺母套设在滚珠丝杠上,滚珠丝杠底端与拨杆另一端固连;所述拨杆与支点接触;所述滚珠螺母被第二滚珠轴承限制径向运动。
8.上述技术方案中,所述第一转向管柱下齿轮前端设有摩擦锥形。
9.上述技术方案中,所述故障诊断模块中运行的故障诊断方法,具体为:
10.搭建基于位置偏差和航向偏差估计转向系统故障的状态空间方程;
11.基于状态空间方程估计前轮转角偏差值;
12.基于转向管柱角位移传感器直接观测获得前轮转角偏差值;
13.基于状态空间方程估计的前轮转角偏差与直接观测获得的前轮转角偏差信息进行融合;
14.将主转向电机故障等级划分为正常工作、一级故障、二级故障和三级故障;
15.所述状态空间方程为:
[0016][0017]
式中,矩阵矩阵u=[δf],矩阵f=[fδ
f-δf+ε],矩阵f表示基于车辆位置偏差和航向偏差所估计转向系统故障所引起的前轮转角偏差值;
[0018]
矩阵矩阵矩阵
[0019]
其中:ed为车辆的位置偏差,为车辆的航向偏差,f是误差增益,ε是由于故障导致的额外扰动,δf是主转向电机期望的前轮转角,为参考航向角,a为前轴到车辆质心的距离,b为后轴到车辆质心的距离,iz为车辆关于车辆坐标系z轴的转动惯量,m为车辆的整备质量,v
x
,为车辆纵向车速,c
αi
为第i个车轮轮胎的侧偏刚度,i=1、2、3、4,分别代表车辆的左前轮、右前轮、左后轮和右后轮;
[0020]
所述前轮转角偏差值通过以下公式计算:
[0021][0022]
其中:
△
x2和
△
x4是矩阵的第2个元素和第4个元素,q是取值为[0 1]区间的权重;
[0023]
融合之后的前轮转角偏差绝对值表示为:
[0024][0025]
其中:e
δ
(k)是转向管柱角位移传感器直接观测获得前轮转角偏差值,γ是信息融合之后的前轮转角偏差绝对值,w是权重系数。
[0026]
上述技术方案中,所述w通过w=c|ei|进行确定的,其中c为大于0的常数,ei为主转向电机电流与期望值的偏差。
[0027]
上述技术方案中,所述满足:
[0028][0029]
其中:x(k+1)为车俩姿态传感器和gps定位模块获得的当前状态量,为预测获得k+1时刻的状态量,矩阵矩阵矩阵tf为控制器运算的步长。
[0030]
上述技术方案中,所述主转向电机故障等级划分是根据如下规则设计的:
[0031]
γ在[0,γ
m0
]之间,主转向电机正常工作;
[0032]
γ在[γ
m0
,γ
m1
]之间,主转向电机发生一级故障;
[0033]
γ在[γ
m1
,γ
m2
]之间,主转向电机发生二级故障;
[0034]
γ大于γ
m2
,主转向电机发生三级故障;
[0035]
所述γ
m0
为主转向电机正常工作下的下限值,γ
m1
为主转向电机发生一级故障的下限值,γ
m2
为主转向电机发生二级故障的下限值。
[0036]
一种无人驾驶车辆自主转向系统的容错控制方法,具体为:
[0037]
当主转向电机正常工作时,容错装置不需介入;
[0038]
当主转向电机发生一级故障时,通过改变主转向电机两端的电压参数使主转向电机产生更大的转矩,前轮转角得到补偿,从而跟踪上期望值;
[0039]
当汽车的主转向电机发生二级故障导致左转转向不足时,右侧轮毂电机产生比左侧轮毂电机更大的驱动转矩,利用差动转向对主动转向补偿;当右转转向不足时,左侧轮毂电机产生比右侧轮毂电机更大的驱动转矩,利用差动转向对主动转向补偿;
[0040]
当转向电机发生三级故障时,拨杆电机工作使衔接套上移,将第一转向管柱和第二转向管柱接合,行星齿轮变速机构中断动力传输,冗余转向电机工作,对主转向电机进行接管。
[0041]
进一步地,前轮转角的最大补偿值
△
θ
max
为:
[0042][0043]
其中:为当前时刻前轮转角的角速度,为主转向电机故障后前轮转角的最大角加速度。
[0044]
本发明的有益效果为:
[0045]
(1)本发明提供了一种无人车辆自主转向系统的故障诊断方法,通过将传感器直接观测故障跟、基于车辆位置和航向偏差估计故障相结合,通过信息融合对转向执行器的故障等级进行判别,能有效防止转向管柱角位移传感器故障和一些机械结构件发生故障而引起转向故障误诊,从而有利后续容错控制的进行;
[0046]
(2)本发明提供了一种无人车辆自主转向系统的容错装置,容错切换机构采用拨
杆电机提供动力并通过减速器减速增扭后,利用滚珠丝杠副将电机的旋转运动转化为丝杠的直线运动,推动拨叉将衔接套上移实现第一转向管柱和第二转向管柱的结合;此发明结构简单,接合可靠,通过整车控制器(vcu)自动控制,无需驾驶员接管;
[0047]
(3)本发明提供了一种无人车辆自主转向系统的容错控制方法,针对主转向电机的故障等级,提出了相应的容错方法;当主转向电机轻微故障时,改变主转向电机的电压参数和利用差动转向对前轮转角进行补偿,当主转向电机发生严重故障时,利用冗余转向电机对主转向电机接管完成容错控制,避免了冗余装置的过早介入造成能量损耗,有利于进一步提高控制系统的自适应能力。
附图说明
[0048]
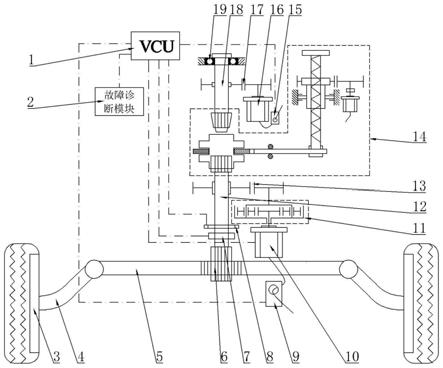
图1为本发明所述无人驾驶车辆自主转向系统容错装置结构示意图;
[0049]
图2为本发明所述无人驾驶车辆自主转向系统的容错切换机构结构示意图;
[0050]
图3为本发明所述无人驾驶车辆自主转向系统的故障诊断方法流程图;
[0051]
图4为本发明所述无人驾驶车辆偏离期望路径后位置偏差和航向偏差示意图;
[0052]
图5为本发明所述无人驾驶车辆自主转向系统的容错控制方法流程图;
[0053]
图6为本发明所述无人驾驶车辆的轮毂电机分布示意图;
[0054]
图中:1-整车控制器(vcu)、2-故障诊断模块、3-轮毂电机组、3.1-第一轮毂电机、3.2-第二轮毂电机、3.3-第三轮毂电机、3.4-第四轮毂电机、4-转向节臂、5-转向横拉杆、6-齿轮齿条转向器、7-转向管柱扭矩传感器、8-转向管柱角位移传感器、9-第一霍尔电流传感器、10-主转向电机、11-行星齿轮变速机构、12-第二转向管柱、13-换向齿轮组、14-容错切换机构、14.1-第二转向管柱上齿轮、14.2-衔接套、14.3-拨杆、14.4-支点、14.5-滚珠丝杠、14.6-滚珠螺母、14.7-拨杆电机、14.8-第二减速器、14.9-第二滚珠轴承、14.10-第一转向管柱下齿轮、14.11-摩擦锥形、15-第二霍尔电流传感器、16-冗余转向电机、17-第一减速器、18-第一转向管柱、19-第一滚珠轴承。
具体实施方式
[0055]
下面结合附图以及具体实施例对本发明作进一步的说明,但本发明的保护范围并不限于此。
[0056]
如图1所示,本发明一种无人驾驶车辆自主转向系统容错装置,具体包括执行机构、检测单元、故障诊断模块2和整车控制器(vcu)1。
[0057]
所述执行机构包括转向节臂4、转向横拉杆5、齿轮齿条转向器6、主转向电机10、行星齿轮变速机构11、第二转向管柱12、换向齿轮组13、容错切换机构14、冗余转向电机16、第一减速器17和第一转向管柱18;所述主转向电机10通过can总线与整车控制器(vcu)1通信,从而为转向系统转向提供动力,其输出轴与行星齿轮变速机构11中太阳轮的轴杆通过花键连接;所述行星齿轮变速机构11的行星架和换向齿轮组13的输入齿轮轴杆通过花键连接,行星齿轮变速机构11的齿圈具有锁死和自由两个状态,当齿圈处于锁死状态时,动力由主转向电机10通过行星齿轮变速机构11减速增扭后传递到换向齿轮组13,当齿圈处于自由状态时,行星齿轮变速机构11的运动件都不受约束,此时实现动力中断;换向齿轮组13具有改变力矩传递方向的功能,其输出齿轮被固定安装在第二转向管柱12的柱体上;所述齿轮齿
条转向器6的输入齿轮与第二转向管柱12下端连接,其输出齿条可带动转向横拉杆5横向运动;所述转向节臂4的一端通过球销和转向横拉杆5连接,另一端固定安装在转向节上,转向横拉杆5的水平运动,拉动转向节臂4使转向节转动,从而带动转向轮以主销为中心转动一定角度;所述冗余转向电机16通过can总线与整车控制器(vcu)1通信,在主转向电机发生三级故障时为转向系统转向提供动力;所述第一减速器17的输入齿轮与冗余转向电机16的输出轴连接,其输出齿轮被固定安装在第一转向管柱18的柱体上;所述第一转向管柱18的上端被第一滚珠轴承19限制其径向运动;在转向电机10发生三级故障时,整车控制器(vcu)1控制行星齿轮变速机构11的齿圈松弛,动力由冗余转向电机16接管,所述容错切换机构14用于将第一转向管柱18上的转矩传递到第二转向管柱12。
[0058]
参见图1和图2,所述容错切换机构14包括第二转向管柱12上齿轮14.1、衔接套14.2、拨杆14.3、支点14.4、滚珠丝杠14.5、滚珠螺母14.6、拨杆电机14.7、第二减速器14.8、第二滚珠轴承14.9、第一转向管柱下齿轮14.10和摩擦锥形14.11;所述衔接套14.2用于将第一转向管柱18和第二转向管柱12衔接或分离,实现冗余转向电机16动力的传递和中断,其柱体表面开设有凹槽与拨杆14.3一端配合,其上端开设有内锥形齿与第一转向管柱下齿轮14.10配合,其下端开设有内柱形齿与第二转向管柱上齿轮14.1处于常啮合状态;所述摩擦锥形14.11位于第一转向管柱下齿轮14.10前端,在结合过程中使得第一转向管柱18由静止加速到和衔接套14.2速度相等以减小接合冲击;所述拨杆电机14.7为容错切换机构提供动力;第二减速器14.8的输入齿轮与拨杆电机14.7的输出轴连接,其输出轴被固定安装在滚珠螺母14.6上,滚珠螺母14.6套设在滚珠丝杠14.5上,滚珠丝杠14.5底端与拨杆14.3另一端固连;拨杆14.3与支点14.4接触;所述滚珠螺母14.6被第二滚珠轴承14.9限制径向运动;在容错切换过程中,拨杆电机14.7提供动力,经过第二减速器14.8减速增扭后驱动滚珠丝杠幅,使得滚珠丝杠14.5径向运动,在支点14.4作用下,推动拨杆14.3使衔接套14.2上移,将第一转向管柱18和第二转向管柱12接合,与此同时,整车控制器(vcu)1控制主转向电机10中断动力,控制行星齿轮变速机构11中的齿圈松弛,使扭矩传递中断。
[0059]
参见图1,所述检测单元包括转向管柱扭矩传感器7、转向管柱角位移传感器8、第一霍尔电流传感器9和第二霍尔电流传感器15;所述转向管柱扭矩传感器7安装在第二转向管柱12上,用于检测第二转向管柱12受到的扭矩;所述转向管柱角位移传感器8安装在第二转向管柱12上,用于检测第二转向管柱12的角位移;所述第一霍尔电流传感器9通过can总线与整车控制器(vcu)1通信,用于检测通过主转向电机10的电枢电流;所述第二霍尔电流传感器15通过can总线与整车控制器(vcu)1通信,用于检测通过冗余转向电机16的电枢电流。
[0060]
所述故障诊断模块2中烧录了自主转向系统故障诊断算法的代码,用于划分主转向电机10的故障等级。
[0061]
所述整车控制器(vcu)1接收检测单元采集的数据和故障诊断模块2诊断的故障信息,控制执行机构完成自主转向和容错控制。
[0062]
图3所示为本发明一种无人驾驶车辆自主转向系统的故障诊断方法,具体包括如下步骤:
[0063]
s1,搭建基于位置偏差和航向偏差估计转向系统故障的状态空间方程:建立主向电机10的统一数学模型,结合车辆的动力学微分方程,以位置偏差和航向偏差作为状态变
量,前轮转角为控制变量,建立用于估计转向系统故障的状态空间方程。
[0064]
对转向系统故障进行分析,转向系统故障主要是由传感器故障、控制器故障和主转向电机10故障所导致,其中控制器故障由具有软件冗余的方法处理故障,因此本发明仅针对转向管柱角位移传感器8的故障和主转向电机10的故障进行故障诊断和容错控制。转向系统故障又可分为部分故障和完全失效,建立统一数学模型为:
[0065]
δa=fδf+ε
ꢀꢀ
(1)
[0066]
式中,其中δa是主转向电机10故障时真正的前轮转角,δf是主转向电机10期望的前轮转角;f是误差增益,描述转向系统故障的程度;ε是由于故障导致的额外扰动。
[0067]
建立具有横摆和横向运动的二自由度车辆模型,其动力学微分方程为:
[0068][0069]
式中,m为车辆的整备质量,v
x
,和vy分别为车辆纵向和侧向车速,为车辆的横摆角速度,δf期望的前轮转角,f
xi
为第i个车轮轮胎的纵向力,f
yi
为第i个车轮轮胎的侧偏力(i=1、2、3、4,分别代表车辆的左前轮、右前轮、左后轮和右后轮),iz为车辆关于车辆坐标系z轴的转动惯量,a为前轴到车辆质心的距离,b为后轴到车辆质心的距离,lf为前轮轮距。
[0070]
在二自由度车辆模型中,轮胎的侧偏力可以表示为轮胎侧偏角的线性函数:
[0071]fyi
=c
αi
αiꢀꢀ
(3)
[0072]
式中,αi为第i个车轮的轮胎侧偏角,c
αi
为第i个车轮轮胎的侧偏刚度。
[0073]
各轮胎侧偏角为:
[0074][0075]
考虑到δf是相对较小的量,因此可以令sinδf=0、cosδf=1。结合公式(2)、(3)、(4),车辆二自由度车辆模型的动力学微分方程可以转化为:
[0076][0077]
参见图4,位置p是车辆当前时刻的期望位置,位置偏差ed是指车辆真实位置与期望路径上参考位置之间的距离。
[0078]
当分布式驱动无人驾驶车辆在跟踪期望路径时,航向偏差是指车辆真实行驶方向和期望路径上参考位置切向方向的夹角,因此航向偏差可以表示为:
[0079][0080]
式中,为车辆的航向角,是车辆行驶方向与大地坐标系中x轴方向的夹角;为参考航向角,是参考点处切向方向与大地坐标系中x轴方向的夹角。
[0081]
公式(6)对时间的一阶导和二阶求导,得到下式:
[0082][0083]
由图4中所展示的车辆运动学规律,位置偏差的变化率需要满足如下公式:
[0084][0085]
由于的值相对较小,公式(8)可以简化为:
[0086][0087]
由公式(7)和公式(9),进一步得到如下公式:
[0088][0089]
将公式(10)代入简化后的动力学微分方程式(5),公式(5)可以转化为:
[0090][0091]
由于一般而言期望路径的曲率变化相对平缓,在公式(11)中,可以被忽略。一旦主转向电机10故障发生,转向前轮无法跟踪期望的前轮转角,下一时刻,车辆的位置偏差ed、航向偏差以及它们的变化率和将会显著变大。以ed、为状态量并结合公式(1)和公式(11),则用于估计转向系统故障的状态空间方程可表示为:
[0092][0093]
式中,矩阵矩阵u=[δf],矩阵f=[fδ
f-δf+ε],矩阵f表示基于车辆位置偏差和航向偏差所估计转向系统故障所引起的前轮转角偏差值;
[0094]
矩阵
[0095]
矩阵矩阵
[0096]
s2,基于状态空间方程估计前轮转角偏差值:根据上一时刻车辆位置、航向与期望值的偏差,通过状态空间方程预测当前时刻的位置偏差和航向偏差;通过车辆状态传感器和gps定位模块观测当前时刻的位置偏差和航向偏差;通过转向系统故障诊断算法,估算当前时刻由于转向系统故障导致的前轮转角偏差。
[0097]
将公式(12)的状态空间方程进行离散化,得到公式(13):
[0098][0099]
式中,tf为控制器运算的步长。通过k时刻的状态量x(k)和期望控制量u(k)通过公式(13)预测获得k+1时刻的状态量通过车俩姿态传感器和gps定位模块获得的当前状态量为x(k+1),因此由于转向系统故障引起的状态量突变可以表示为根据公式(13),k时刻到k+1时刻的状态量突变可以通过以下公式进行估计:
[0100][0101]
式中,为k时刻到k+1时刻的状态量突变,为k时刻基于车辆位置偏差和航向偏差所估计转向系统故障所引起的前轮转角偏差值。
[0102]
由于矩阵并非一个方阵,矩阵的逆不存在,无法通过求解非齐次线性方程组获得,但它可以通过以下的公式进行估计:
[0103][0104]
式中,
△
x2和
△
x4是矩阵的第2个元素和第4个元素,q是取值为[0 1]区间的权重,q越大意味着转向系统故障对位置偏差的影响较大,q越小意味着转向系统故障对航向偏差的影响较大。经过反复测试,当转向系统故障时,q=0.6被认为是可取的。
[0105]
s3,基于转向管柱角位移传感器8直接观测获得前轮转角偏差值:通过转向管柱角位移传感器8采集第二转向管柱18角位移信息推算前轮转角,与期望值相比,从而观测当前时刻由于转向系统故障导致的前轮转角偏差。
[0106]
k时刻期望的前轮转角值为δf(k),通过转向管柱角位移传感器8观测所得的第二转向管柱角位移为θ(k),第二转向管柱角位移到前轮角位移的传动比为τ,则所观测k时刻的前轮转角值可以表示为τθ(k),基于转向管柱角位移传感器8直接观测获得前轮转角偏差值可以表示为:
[0107]eδ
(k)=τθ(k)-δf(k)
ꢀꢀ
(16)
[0108]
s4,故障信息融合:引入权重因子,将s2通过车辆位置偏差和航向偏差估计的前轮转角偏差与s3通过传感器直接观测获得的前轮转角偏差信息进行融合。
[0109]
当转向管柱角位移传感器8发生漂移或者卡死故障时,单独基于传感器观测的方法无法准确判断主转向电机10的故障等级,从而做出有效的转向补偿,因此本发明将s2通过车辆位置和航向偏差估计的前轮转角偏差与s3通过传感器直接观测获得的前轮转角偏差信息进行融合,对转向执行器的故障等级进行判别。融合之后的前轮转角偏差绝对值可以表示为:
[0110][0111]
式中,γ是信息融合之后的前轮转角偏差绝对值,w是权重系数,取值范围为[0,1]。当主转向电机10或者齿轮齿条转向器6发生堵转时,通过第一霍尔电流传感器9获得的主转向电机电流将发生显著变化。因此本发明利用主转向电机电流与期望值的偏差ei来确定权重系数w;当ei较大,w需要设置较大值,意味着故障诊断系统更信任传感器观测的方法;当ei较小,意味着基于第一霍尔电流传感器9未检测到电机故障,为了防止此时转向管柱角位移传感器8发生故障引起故障误诊,此时,w需要设置较小值,故障诊断系统更信任基于车辆位置偏差和航向偏差估计转向系统故障的方法。
[0112]
w可以通过以下公式确定:
[0113]
w=c|ei|
ꢀꢀ
(18)
[0114]
式中,c为大于0的常数,可以设计合理的故障测试试验对c进行参数整定。
[0115]
s5,主转向电机10故障等级划分:通过实验数据拟合主转向电机10正常工作、一级故障、二级故障和三级故障的前轮转角偏差阈值,利用自诊断规则判定主转向电机10的故障等级。
[0116]
通过实验数据设定γ
m0
为主转向电机10正常工作下的下限值,γ
m1
为主转向电机10发生一级故障的下限值,γ
m2
为主转向电机10发生二级故障的下限值。
[0117]
故障自诊断的规则设计如下:
[0118]
γ在[0,γ
m0
]之间,主转向电机10正常工作;
[0119]
γ在[γ
m0
,γ
m1
]之间,主转向电机10发生一级故障,亦称之为转向电机漂移故障;
[0120]
γ在[γ
m1
,γ
m2
]之间,主转向电机10发生二级故障,亦称之为转向电机弱化故障;
[0121]
γ大于γ
m2
,主转向电机10发生三级故障,亦称之为转向电机发生严重弱化故障或失效故障。
[0122]
当γ在[0,γ
m0
]之间可认为转向系统受到测量噪声和外界干扰影响,但主转向电机10正常工作,容错装置不需介入。当主转向电机10发生一级故障时,由于主转向电机10或者轴承发生机械性故障,转向系统受到阻力矩的作用,使得前轮转角和其期望值之间发生漂移,此时,需要执行一级容错控制。当主转向电机10发生二级故障时,由于三相电压不平衡或者功率不足等故障,转向电机提供转矩的能力弱化,使得前轮转角与其期望值之间存在较大偏差,此时,需要执行二级容错控制。当主转向电机10发生三级故障时,由于主转向电机10烧坏或缺相等故障,主转向电机10发生严重弱化,甚至失效,此时需要执行三级容错控制。所述故障诊断方法能将传感器直接观测故障与基于车辆位置和航向偏差估计故障相结合,通过信息融合对转向执行器的故障等级进行判别,能有效防止转向管柱角位移传感器8故障和一些机械结构件发生故障而引起转向故障误诊。
[0123]
参见图5,基于上述容错装置,本发明提出的一种无人车辆自主转向系统的容错控
制方法如下:
[0124]
情景1:当故障诊断模块2检测到主转向电机10正常工作时,容错装置不需介入。
[0125]
情景2:当故障诊断模块2检测到主转向电机10发生一级故障时,主转向电机10发生部分失效,真实的前轮转角无法跟踪上期望值,但可通过改变主转向电机10两端的电压参数使其产生更大的转矩,前轮转角得到补偿,从而跟踪上期望值。但前轮转角的补偿值
△
θ受到主转向电机10效能和故障情况的限制,前轮转角的最大补偿值
△
θ
max
通过以下方法确定:
[0126]
本发明优选的主转向电机10产生的最大转矩为t
max
,则故障发生后电机所能发出的最大转矩为ft
max
,建立转向系统的数学模型,此时前轮转角的最大角加速度为前轮转角的最大补偿值
△
θ
max
可以表示为:
[0127][0128]
式中,为当前时刻前轮转角的角速度,tf为控制器运算的步长。
[0129]
当前轮转角的补偿值小于
△
θ
max
时,可以通过改变主转向电机10两端的电压参数使得实际前轮转角跟踪上期望值。
[0130]
情景3:当故障诊断模块2检测到主转向电机10发生二级故障时,主转向电机10发生部分失效,前轮转角需要的补偿值大于
△
θ
max
,此时,通过改变主转向电机10的电压参数已经无法达到补偿前轮转角的目的。利用分布式驱动无人驾驶车辆具有4轮毂电机转矩独立且精确控制的特点,合理利用轮毂电机驱动冗余的特性,当汽车的主转向电机10发生二级故障导致左转转向不足时,整车控制器(vcu)1控制右侧的第二轮毂电机3.2和第四轮毂电机3.4产生比左侧第一轮毂电机3.1和第三轮毂电机3.3更大的驱动转矩,利用差动转向对主动转向进一步补偿;当右转转向不足时,整车控制器(vcu)1控制左侧第一轮毂电机3.1和第三轮毂电机3.3产生比右侧的第二轮毂电机3.2和第四轮毂电机3.4更大的驱动转矩,利用差动转向对主动转向进一步补偿;轮毂电机的空间位置参见图6。
[0131]
情景4:当故障诊断模块2检测到主转向电机10发生三级故障时,主转向电机10发生严重部分失效,甚至完全失效。通过改变电压参数补偿和差动转向补偿无法达到补偿前轮转角的目的,此时整车控制器(vcu)1控制拨杆电机14.7工作使衔接套14.2上移,将第一转向管柱18和第二转向管柱12接合,在接合后整车控制器(vcu)1控制行星齿轮变速机构11中断动力传输,与此同时控制冗余转向电机16工作对主转向电机10进行接管。
[0132]
所述实施例为本发明的优选的实施方式,但本发明并不限于上述实施方式,在不背离本发明的实质内容的情况下,本领域技术人员能够做出的任何显而易见的改进、替换或变型均属于本发明的保护范围。